RobotMovement 机器人运动控制工具
RobotMovement 算子为机器人运动控制工具,用于控制机器人移动。
| type | 功能 |
|---|---|
| MoveJoint | 通过 joint 移动机器人。 |
| MoveJointList | 通过 joint_list 移动机器人。 |
| MoveTCP | 通过 TCP 移动机器人。 |
| MoveTCPList | 通过 TCP_List 移动机器人。 |
| StopMotion | 停止机器人。 |
| SetRobotIO | 设置机器人 IO 端口信号。 |
| WaitRobotIO | 在设置时间内,等待机器人 IO 端口信号进行判断输出。 |
MoveJoint
将 RobotMovement 算子的 类型 属性选择 MoveJoint ,通过 joint 移动机器人。
算子参数
机器人资源名称/robot_resource_name:机器人资源名。选择在Resource Group 中添加的机器人资源。关节/joint:机器人移动的关节值。显示目标机器人/show_targe_trobot:目标机器人的可视化。是/Ture:显示目标机器人。
否/Flase:不显示目标机器人。
速度/velocity:机器人移动的速度。默认值:1。单位:m/s。加速/acceleration:机器人移动的加速度。默认值:1。单位:m/s²。线性运动/move_linear:机器人移动方式。是/True:机器人直线移动。
否/False:机器人正常移动。
数据信号输入输出
输入:
joint数据类型:JointArray
输出内容:机器人关节弧度值数据
输出:
joint数据类型:JointArray
输入内容:机器人关节弧度值数据 joint 数据
功能演示
使用 RobotMovement 中 MoveJoint ,通过 joint 的方式将机器人轴1 移动至 90°。
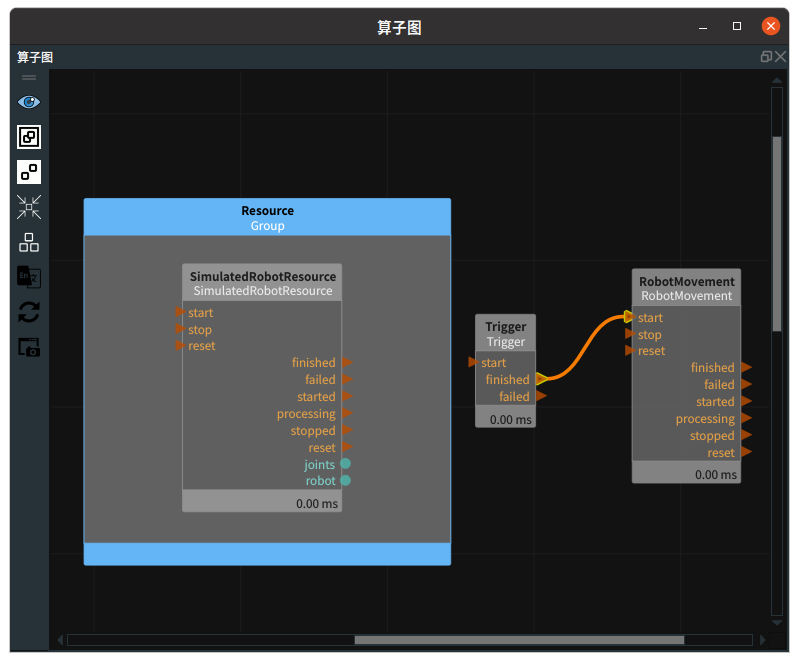
步骤1:算子准备
添加 SimulatedRobotResource 资源算子至 Resource Group 。
添加 Trigger 、RobotMovement 算子至算子图。
步骤2:设置算子参数
设置 SimulatedRobotResource 算子参数:
自动启动 → 是
机器人模型文件 →
 → 选择 robot 文件名 ( example_data/UR5/UR5.rob )
→ 选择 robot 文件名 ( example_data/UR5/UR5.rob )机器人 →
 可视
可视
设置 RobotMovement 算子参数:
机器人资源名称 → SimulatedRobotResource
类型 → MoveJoint
关节 → 1.5708 0 0 0 0 0
步骤3:连接算子
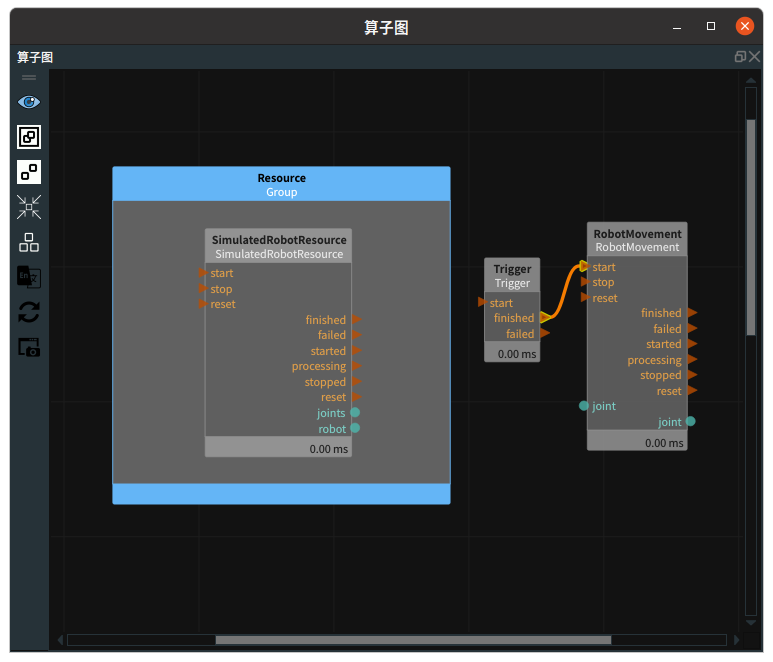
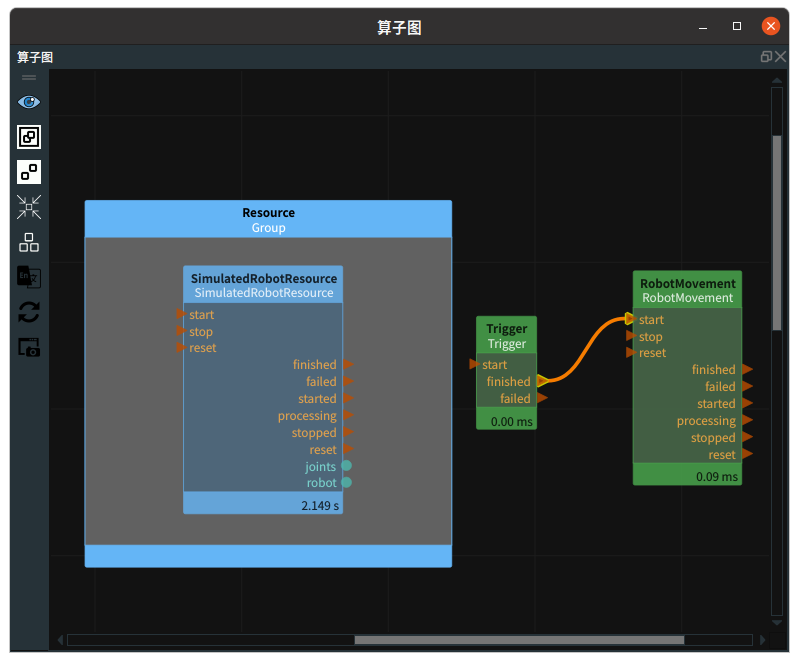
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
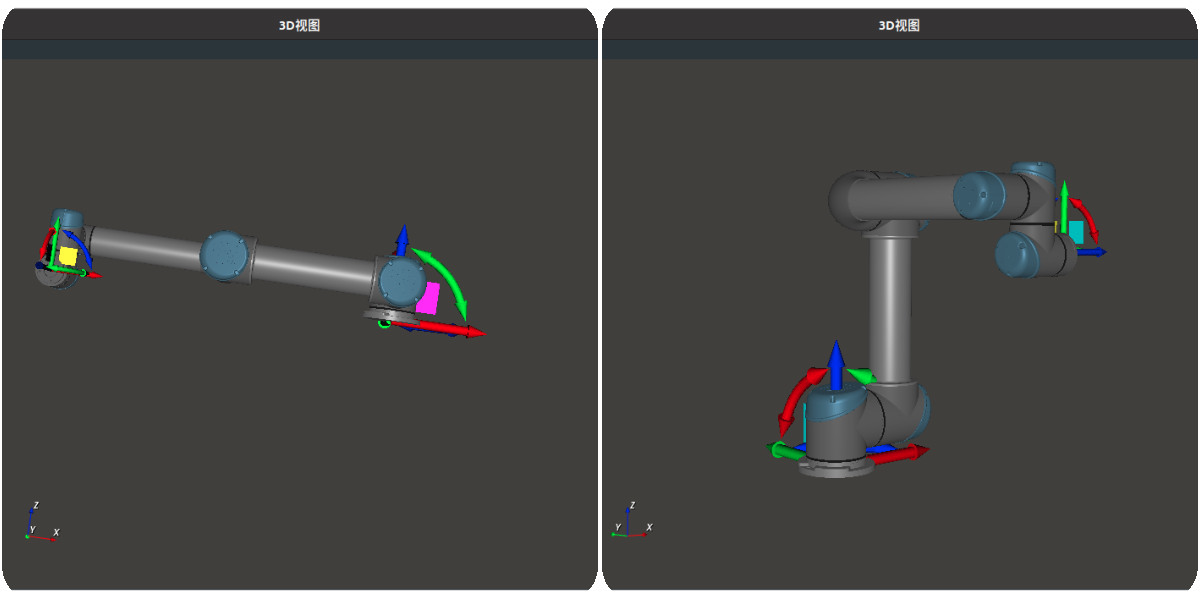
结果如下图所示,左侧为 SimulatedRobotResource 算子 robot 可视化初始状态。右侧为 joint1 旋转 1.5708 后的结果。
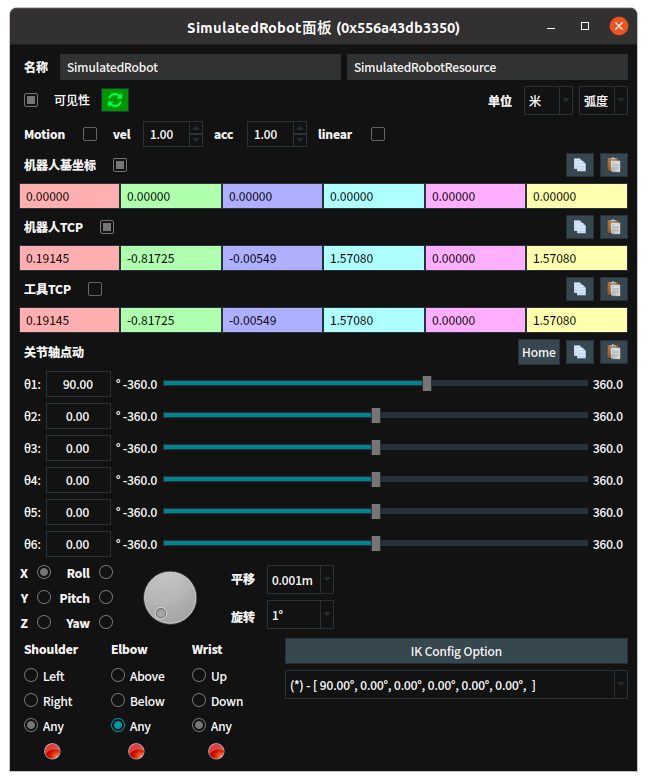
鼠标左键双击 3D 视图中的机器人,弹出机器人面板,将机器人基坐标和机器人 TCP 勾选 True 。
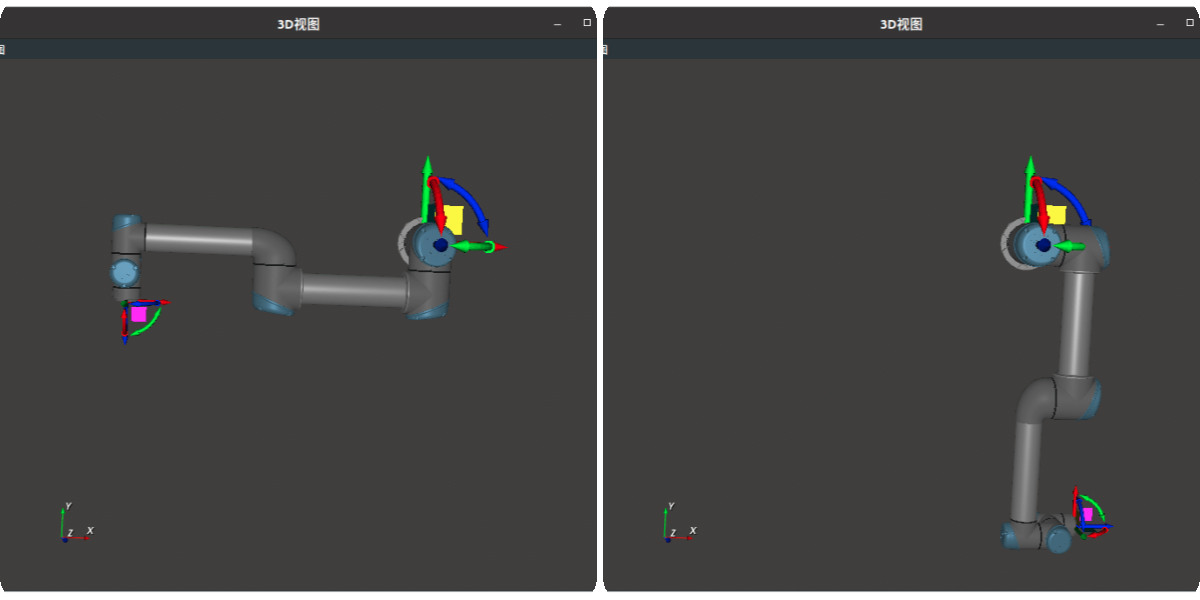
在机器人面板中查看此时机器人关节轴 1 为 90° 。
MoveJointList
将 RobotMovement 算子的 类型 属性选择 MoveJointList ,通过 joint_list 的方式移动机器人。
算子参数
机器人资源名称/robot_resource_name:机器人资源名。选择在Resource Group 中添加的机器人资源。显示目标机器人/show_targe_trobot:目标机器人的可视化。是/Ture:显示目标机器人。
否/Flase:不显示目标机器人。
速度/velocity:机器人移动的速度。默认值:1。单位:m/s。加速/acceleration:机器人移动的加速度。默认值:2。单位:m/s²。线性运行/move_linear:机器人移动方式。是/True:机器人直线移动。
是/False:机器人正常移动。
数据信号输入输出
输入:
joint_list数据类型:JointArrayList
输出内容:机器人关节弧度值列表数据
功能演示
使用 RobotMovement 中 MoveJointList ,通过 joint_list 的方式移动机器人。
步骤1:算子准备
添加 SimulatedRobotResource 资源算子至 Resource Group 。
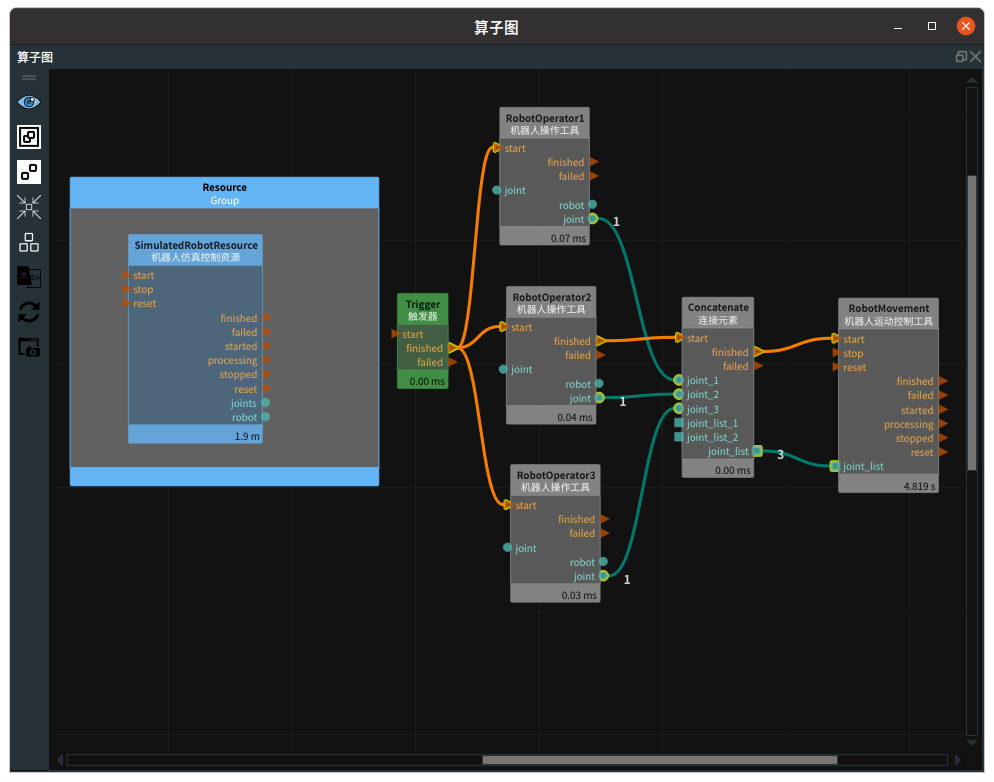
添加 Trigger 、RobotOperator ( 3 个)、Concatenate、RobotMovement 算子至算子图。
步骤2:设置算子参数
设置 SimulatedRobotResource 算子参数:
自动启动 → 是
机器人模型文件 →
→ 选择 robot 文件名 ( example_data/UR5/UR5.rob )机器人 →
可视
设置 RobotOperator 算子参数:
算子名称 → RobotOperator1
类型 → EmitJoint
关节 → 1.5708 0 0 0 0 0
设置 RobotOperator_1 算子参数:
算子名称 → RobotOperator2
类型 → EmitJoint
关节 → 1.5708 -1.5708 0 0 0 0
设置 RobotOperator_2 算子参数:
算子名称 → RobotOperator3
类型 → EmitJoint
关节 → 1.5708 -1.5708 1.5708 0 0 0
设置 Concatenate 算子参数:
类型 → JointArray
输入数量 → 3
设置 RobotMovement 算子参数:
机器人资源名称 → SimulatedRobotResource
类型 → MoveJointList
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
在机器人运动过程中,会根据 Concatenate 算子的输出结果 joints_list 的索引分别移动。
最终结果如下图所示,左侧为 SimulatedRobotResource 算子 robot 可视化初始状态。右侧为移动最后一组 RobotOperator3 机器人关节弧度值结果。
鼠标左键双击 3D 视图中的机器人,弹出机器人面板,将机器人基坐标和机器人 TCP 勾选 True 。
在机器人面板中查看此时机器人关节轴 1 : 90°,轴2:-90°,轴3:90° 。该值为最后 RobotOperator3 算子中生成的关节值弧度值。

MoveTCP
将 RobotMovement 算子的 类型 属性选择 MoveTCP ,通过 TCP 移动机器人。
算子参数
机器人资源名称/robot_resource_name:机器人资源名。选择在 Resource Group 中添加的机器人资源。tcp:机器人末端坐标。显示目标机器人/show_targe_trobot:目标机器人的可视化。是/Ture:显示目标机器人。
否/Flase:不显示目标机器人。
速度/velocity:机器人移动的速度。默认值:1。单位:m/s。加速/acceleration:机器人移动的加速度。默认值:1。单位:m/s²。线性运动/move_linear:机器人移动方式。是/True:机器人直线移动。
否/False:机器人正常移动。
数据信号输入输出
输入:
goal_pose数据类型:Pose
输出内容:pose 数据
ref_joint数据类型:JointArray
输出内容:机器人关节弧度值数据
输出:
ik_solution_joint数据类型:JointArray
输出内容:机器人关节弧度值数据
功能演示
使用 RobotMovement 中 MoveTCP ,通过 TCP 的方式移动机器人。
步骤1:算子准备
添加 SimulatedRobotResource 资源算子至 Resource Group
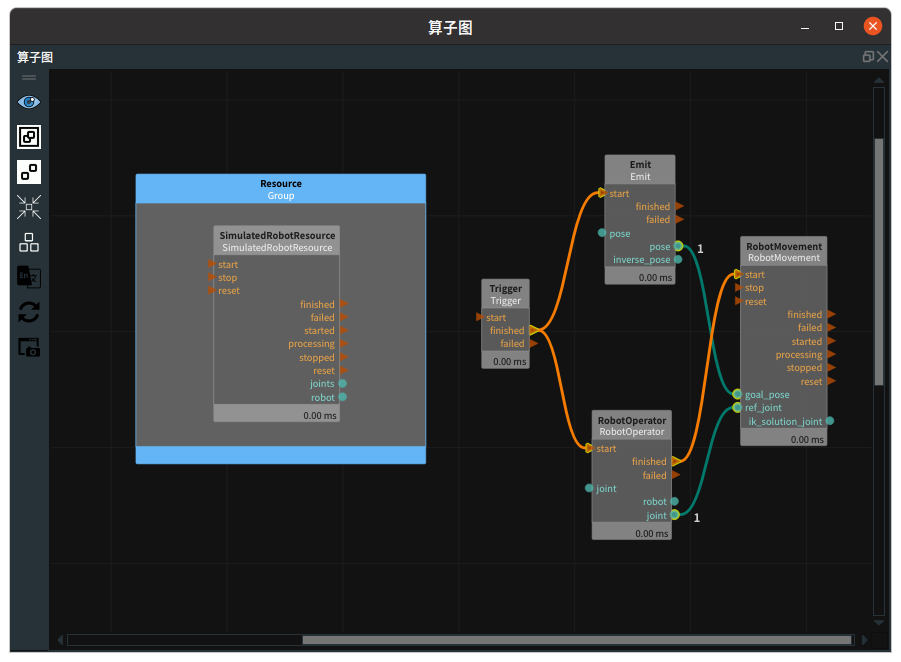
添加 Trigger 、Emit、RobotOperator、RobotMovement 算子至算子图。
步骤2:设置算子参数
设置 SimulatedRobotResource 算子参数:
自动启动 → 是
机器人模型文件 →
→ 选择 robot 文件名 ( example_data/UR5/UR5.rob )机器人 →
可视
设置 RobotMovement 算子参数:
机器人资源名称 → SimulatedRobotResource
类型 → MoveTCP
设置 Emit 算子参数:
类型 → Pose
坐标 → 0.10158 -0.5167 0.39675 -3.11585 0.02054 3.00946
设置 RobotOperator 算子参数:
机器人资源名称 → SimulatedRobotResource
类型 → EmitJoint
关节 → 1.57 -1.57 0 0 0 0
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,在 3D 视图中显示当前加载机器人 RobotMovement 后的结果 。
鼠标左键双击3D视图中的机器人,弹出机器人面板,将机器人基坐标和机器人 TCP 设为 True 。
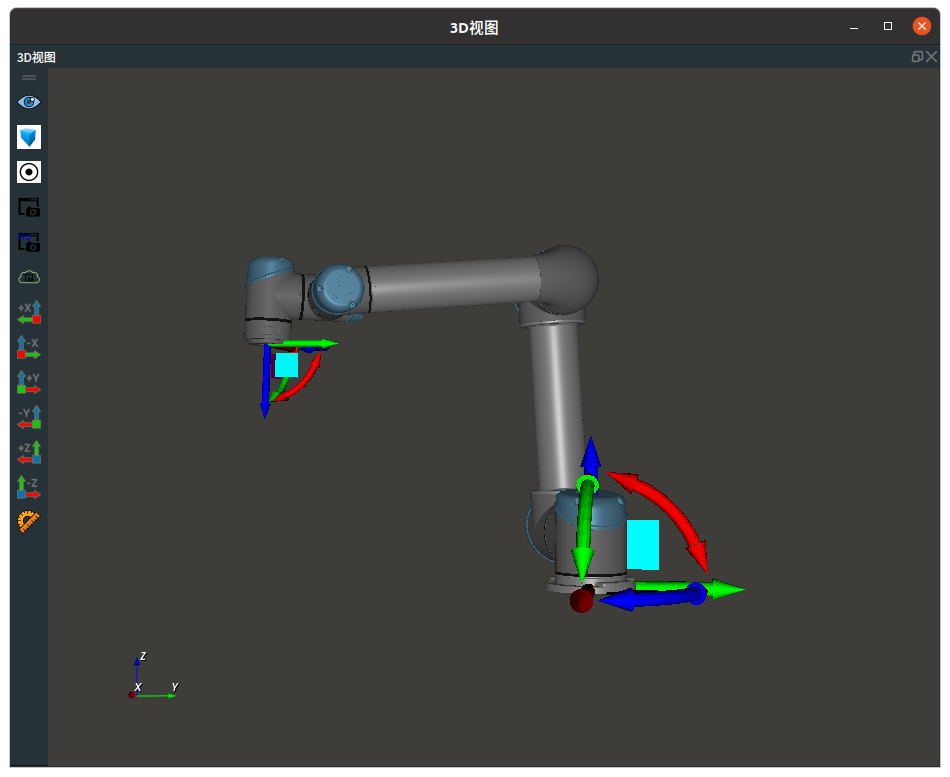
SimulatedRobot 面板中显示机器人当前机器人 TCP 值 和 关节轴值。

MoveTCPList
将 RobotMovement 算子的 类型 属性选择 MoveTCPList ,通过 TCP_List 移动机器人。
算子参数
机器人资源名称/robot_resource_name:机器人资源名。选择在Resource Group 中添加的机器人资源。显示目标机器人/show_targe_trobot:目标机器人的可视化。是/Ture:显示目标机器人。
否/Flase:不显示目标机器人。
速度/velocity:机器人移动的速度。默认值:1。单位:m/s。加速/acceleration:机器人移动的加速度。默认值:2。单位:m/s²。线性运行/move_linear:机器人移动方式。是/True:机器人直线移动。
是/False:机器人正常移动。
数据信号输入输出
输入:
goal_pose_list数据类型:PoseList
输出内容:pose 列表数据
ref_joint数据类型:JointArray
输出内容:机器人关节弧度值数据
输出:
ik_solution_joint_list数据类型:JointArrayLlist
输出内容:机器人关节弧度值列表数据
功能演示
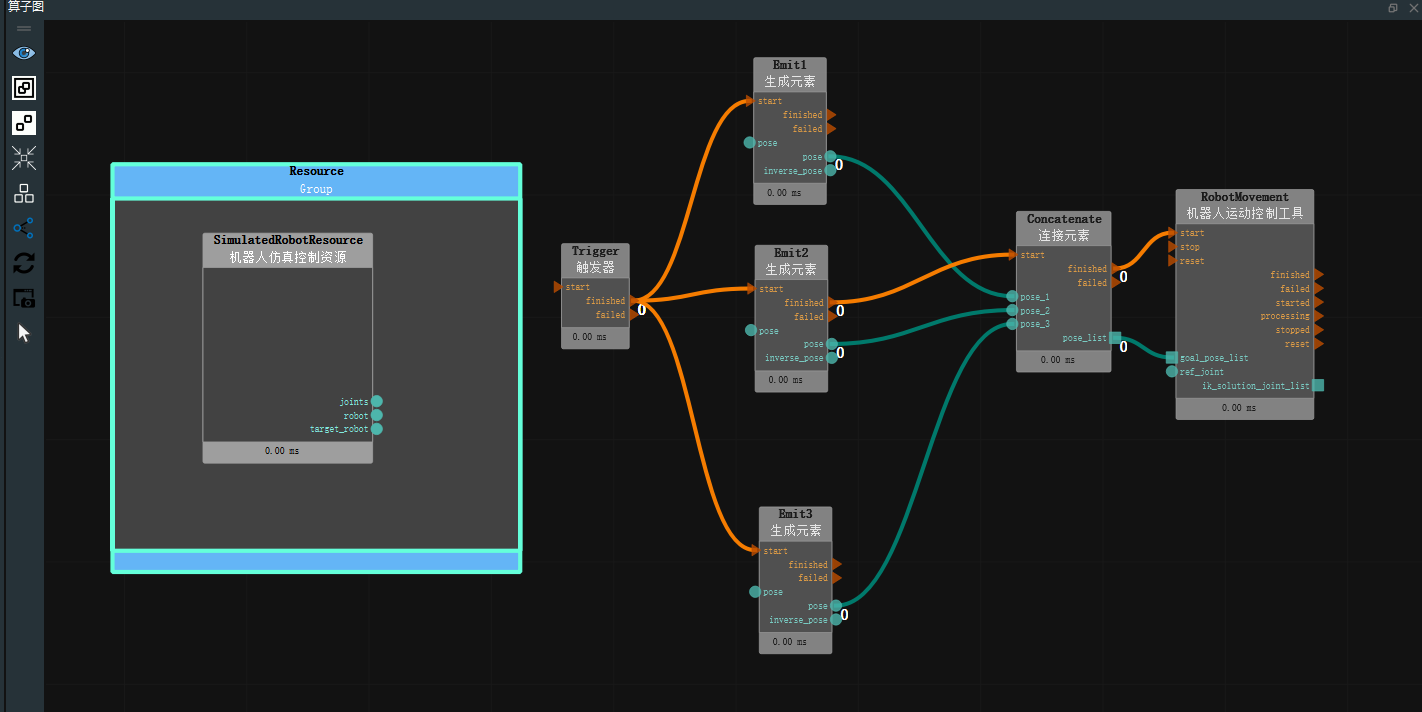
使用 RobotMovement 中 MoveJointList ,通过 TCP_List 的方式移动机器人。
步骤1:算子准备
添加 SimulatedRobotResource 资源算子至 Resource Group 。
添加 Trigger 、Emit ( 3 个)、Concatenate、RobotMovement 算子至算子图。
步骤2:设置算子参数
设置 SimulatedRobotResource 算子参数:
自动启动 → 是
机器人模型文件 →
→ 选择 robot 文件名 ( example_data/UR5/UR5.rob )机器人 →
可视
设置 Emit 算子参数:
算子名称 → Emit1
类型 → Pose
坐标 → 0.490600 -0.109290 0.438640 0.055850 -3.139850 1.570700
设置 Emit_1 算子参数:
算子名称 → Emit2
类型 → Pose
坐标 → 0.490600 -0.286290 0.438640 0.055850 -3.139850 1.570700
设置 Emit_2 算子参数:
算子名称 → Emit3
类型 → Pose
坐标 → 0.490600 -0.286290 0.196640 0.055850 -3.139850 1.570700
设置 Concatenate 算子参数:
类型 → Pose
输入数量 → 3
设置 RobotMovement 算子参数:
机器人资源名称 → SimulatedRobotResource
类型 → MoveTCPList
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
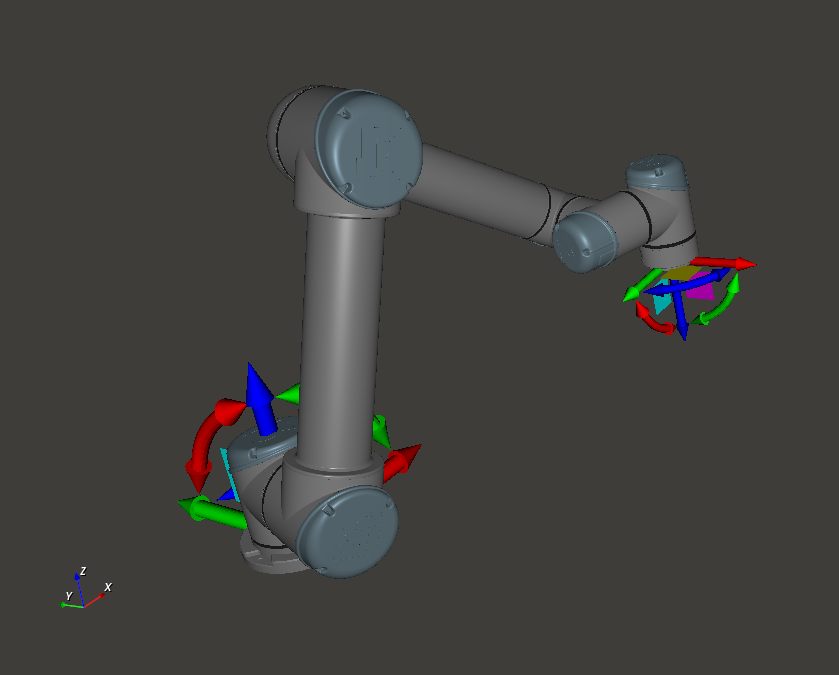
运行结果
在机器人运动过程中,会根据 Concatenate 算子的输出结果POSE_list 的结果分别进行机器人移动。
鼠标左键双击 3D 视图中的机器人,弹出机器人面板,将机器人基坐标和机器人 TCP 勾选 True 。
StopMotion
将 RobotMovement 算子的 类型 属性选择 StopMotion ,用于停止机器人。
算子参数
机器人资源名称/robot_resource_name:机器人资源名。选择在 Resource Group 中添加的机器人资源。
功能演示
使用 RobotMovement 中 StopMotion ,控制机器人停止。
步骤1:算子准备
添加 SimulatedRobotResource 资源算子至 Resource Group 。
添加 Trigger 、RobotMovement 算子至算子图。
步骤2:设置算子参数
设置 SimulatedRobotResource 算子参数:
自动启动 → 是
机器人模型文件 →
→ 选择 robot 文件名 ( example_data/UR5/UR5.rob )机器人 →
可视
设置 RobotMovement 算子参数:
机器人资源名称 → SimulatedRobotResource
类型 → StopMotion
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,触发该算子后,机器人停止运动。
如下图所示,3D 视图中机器人处于停止状态。
SetRobotIO
将 RobotMovement 算子的 类型 属性选择 SetRobotIO ,设置 RVS 主动控制机器人的 IO 端口信号。
算子参数
机器人资源名称/robot_resource_name:机器人资源名。选择在 Resource Group 中添加的机器人资源。
功能演示
使用 RobotMovement 中 SetRobotIO ,设置 RVS 主动控制机器人(elite 机器人)的 IO 端口信号。
步骤1:算子准备
添加 EliteRobotsResource 资源算子至 Resource Group 。
添加 Trigger 、RobotMovement 算子至算子图。
步骤2:设置算子参数
设置 EliteRobotsResource 算子参数:
机器人模型文件 →
→ 选择 robot 文件名 ( example_data/EC66/EC66.rob )机器人 →
可视
设置 RobotMovement 算子参数:
机器人资源名称 → EliteRobotsResource
类型 → SetRobotIO
IO值 → 是
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
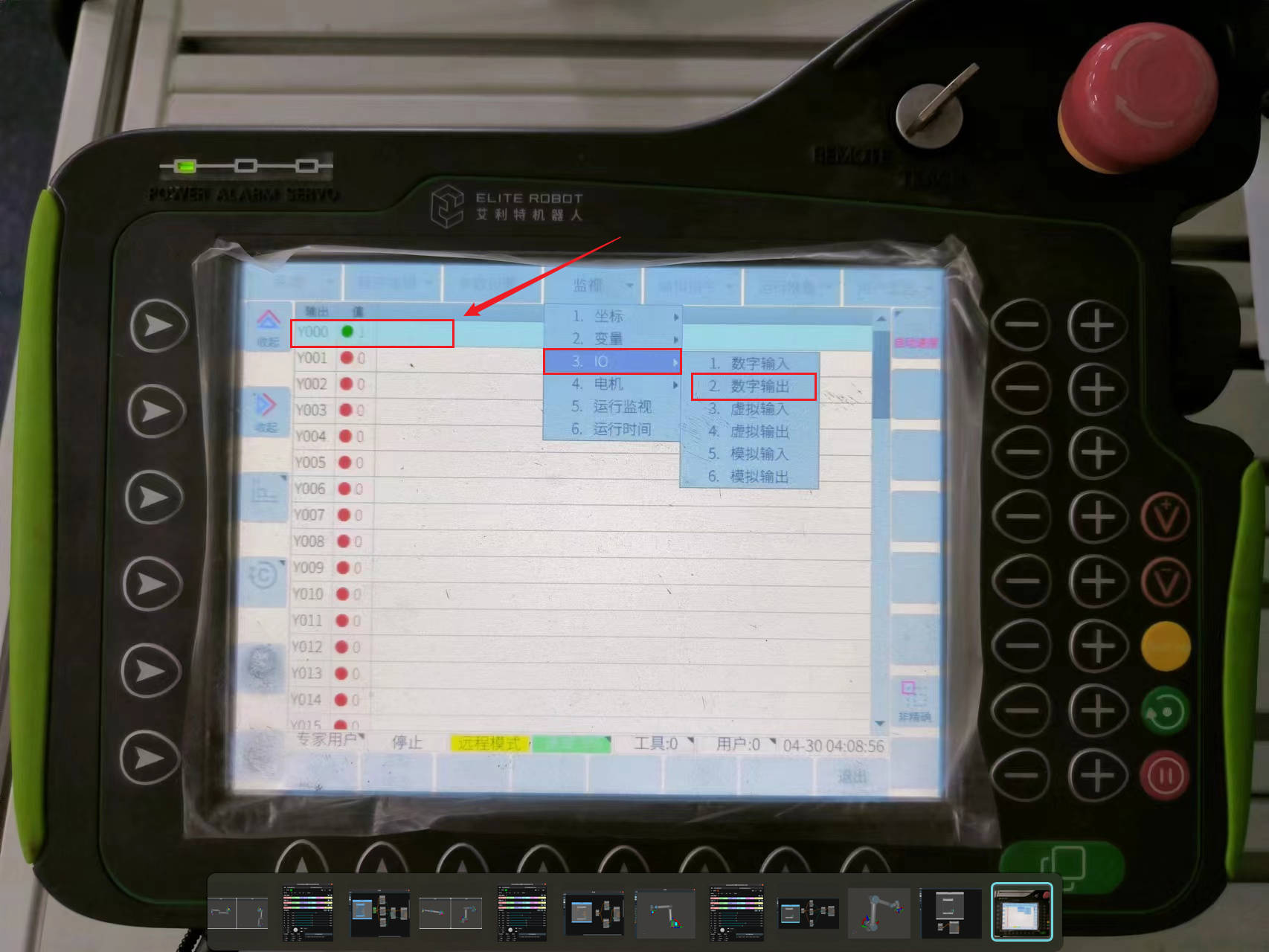
运行结果
如下图所示,触发该算子后, elite 机器人 IO 信号的数字输出端口 0 置为 1 。