图像获取流程
深度相机的配置和图像获取流程如下图所示:
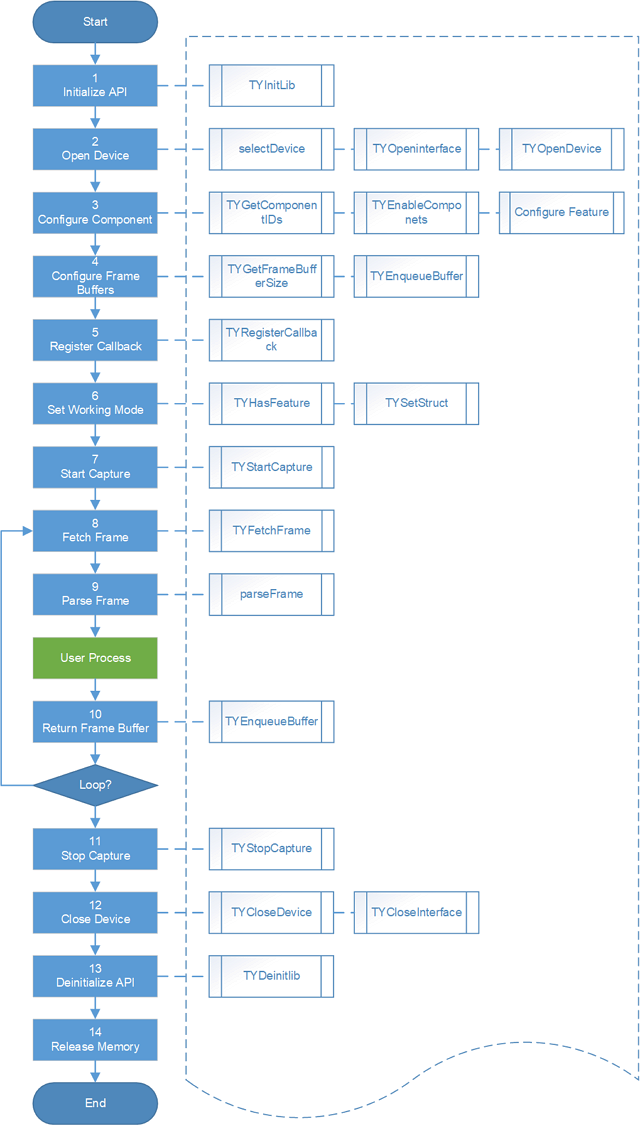
图像获取流程图
下面以 SDK 示例程序 Simpleview_FetchFrame 为例详细说明图像获取流程。
初始化API
TYInitLib 初始化设备对象等数据结构。
打开设备
获取设备列表
初次获取设备信息时可以通过 selectDevice() 查询已连接的设备数量,并获得所有已连接的设备列表。
打开接口
TYOpenInterface 打开接口。
打开设备
TYOpenDevice 通过相机 ID 打开相机。
TYOpenDeviceWithIP 通过相机 IP 打开相机。
配置组件
查询设备的组件状态
TYGetComponentIDs 获取设备支持的组件信息。
TYGetEnabledComponents 获取已经打开的组件信息。
配置组件
TYEnableComponents 使能组件。
TYDisableComponents 关闭组件。
设备打开后,默认只有虚拟组件 TY_COMPONENT_DEVICE 是使能状态。多个组件可以通过 位或 方式同时使能。
int32_t componentIDs = TY_COMPONENT_DEPTH_CAM | TY_COMPONENT_RGB_CAM; TYEnableComponents(hDevice, componentIDs);
配置属性
查询指定属性的信息:
TYGetFeatureInfo() 通过填充结构体 TY_FEATURE_INFO 来获取指定组件的指定属性的信息。如果指定组件不包含所指定的属性,则 TY_FEATURE_INFO 中 isValid 值为 false;如果该组件包含所指定的参数,则 TY_FEATURE_INFO 中 isValid 值为 true。也可以通过 TYGetIntRange 等具体参数类型的 API 接口查询指定功能参数的信息。
常用读写属性函数如下:
TYGetIntRange TYGetInt TYSetInt TYGetFloatRange TYGetFloat TYSetFloat TYGetEnumEntryCount TYGetEnumEntryInfo TYGetEnum TYSetEnum TYGetBool TYSetBool TYGetStringLength TYGetString TYSetString TYGetStruct TYSetStruct
示例
调用 TYSetEnum() 设置深度图像传感器输出数据的格式和分辨率:
LOGD("=== Configure feature, set resolution to 640x480."); ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, TYImageMode2(TY_PIXEL_FORMAT_DEPTH16, 640, 480)));
帧缓冲管理
备注
在进行帧缓冲管理之前,确保已通过 TYEnableComponents() 接口使能了所需的组件,并且通过 TYSetEnum() 接口设置了正确的图像格式和分辨率。这是因为帧缓冲的大小取决于这些设置,否则可能会遇到帧缓冲空间不足的问题。
调用 API 查询当前配置下每个帧缓冲的大小。
uint32_t frameSize; ASSERT_OK( TYGetFrameBufferSize(hDevice, &frameSize) ); LOGD(" - Get size of framebuffer, %d", frameSize);
分配深度数据存储空间。
按照实际查询函数返回的帧缓冲的大小分配两组 frameBuffer 空间,并传递给底层驱动缓冲队列,作为数据获取的通道。
驱动内部维护一个缓冲队列(frameBuffer Queue),每帧数据传出时会将填充好的 frameBuffer 作 Dequeue 操作,并完全传出给用户使用。用户完成该帧图像数据处理后,需做 Enqueue 动作以返还该 frameBuffer 给驱动层缓冲队列。用户需要保证新的一帧数据到来时驱动的缓冲队列不为空,否则该帧数据将被丢弃。
LOGD(" - Allocate & enqueue buffers"); char* frameBuffer[2]; frameBuffer[0] = new char[frameSize]; frameBuffer[1] = new char[frameSize]; LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[0], frameSize); ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[0], frameSize) ); LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[1], frameSize); ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[1], frameSize) );
回调函数注册
TYRegisterEventCallback
注册事件回调函数。异常事件发生的时候,会调用 TYRegisterEventCallback 注册的回调函数。以下示例的回调函数中包含重连的异常处理操作。
static bool offline = false;
void eventCallback(TY_EVENT_INFO *event_info, void *userdata)
{
if (event_info->eventId == TY_EVENT_DEVICE_OFFLINE) {
LOGD("=== Event Callback: Device Offline!");
// Note:
// Please set TY_BOOL_KEEP_ALIVE_ONOFF feature to false if you need to debug with breakpoint!
offline = true;
}
}
int main(int argc, char* argv[])
{
LOGD("Register event callback");
ASSERT_OK(TYRegisterEventCallback(hDevice, eventCallback, NULL))
while(!exit && !offline) {
//Fetch and process frame data
}
if (offline) {
//Release resources
TYStopCapture(hDevice);
TYCloseDevice(hDevice);
// Can try re-open and start device to capture image
// or just close interface exit
}
return 0;
}
配置工作模式
根据实际需要配置深度相机工作模式,详情请参考 工作模式配置。
启动深度采集
TYStartCapture
如果深度相机工作在模式 1 下,可以使用软件触发接口函数 TYSendSoftTrigger(),通过 USB 接口或者以太网接口发送指令,控制相机图像采集的时机。
获取帧数据
TYFetchFrame 用于获取帧数据。
停止采集
TYStopCapture 停止图像数据采集,相机停止深度数据计算和输出。
关闭设备
TYCloseDevice 关闭设备,TYCloseInterface 释放占用的接口。
释放API
TYDeinitLib 释放 API 后,需要释放分配的内存资源,避免内存泄露。