API 指南
基础概念
组件
每个 Percipio 深度相机包含多个器件,如包括左红外图像传感器、右红外图像传感器、激光投射器、彩色图像传感器、IMU 等器件,我们把这些器件统称为组件(Component)。
组件也可能是虚拟器件,例如深度图像传感器、直方图设备等,尽管并不存在这些实体器件,从数据访问的角度并没有什么区别,用户可以同操作真实存在的器件一样操作这些虚拟器件,完成相应的功能设置。
Percipio 深度相机作为一个设备,拥有工作模式相关配置、连接状态保持、网络配置与数据重传配置、光学外参等属性,为实现对这些属性的访问,我们把相机做为一个抽象组件,即设备 (Device) 组件。
相机包含的全体组件定义如下:
typedef enum TY_DEVICE_COMPONENT_LIST
{
TY_COMPONENT_DEVICE = 0x80000000, ///< Abstract component stands for whole device, always enabled
TY_COMPONENT_DEPTH_CAM = 0x00010000, ///< Depth camera
TY_COMPONENT_IR_CAM_LEFT = 0x00040000, ///< Left IR camera
TY_COMPONENT_IR_CAM_RIGHT = 0x00080000, ///< Right IR camera
TY_COMPONENT_RGB_CAM_LEFT = 0x00100000, ///< Left RGB camera
TY_COMPONENT_RGB_CAM_RIGHT = 0x00200000, ///< Right RGB camera
TY_COMPONENT_LASER = 0x00400000, ///< Laser
TY_COMPONENT_IMU = 0x00800000, ///< Inertial Measurement Unit
TY_COMPONENT_BRIGHT_HISTO = 0x01000000, ///< virtual component for brightness histogram of ir
TY_COMPONENT_STORAGE = 0x02000000, ///< virtual component for device storage
TY_COMPONENT_RGB_CAM = TY_COMPONENT_RGB_CAM_LEFT ///< Some device has only one RGB camera, map it to left
}TY_DEVICE_COMPONENT_LIST;
其中,
TY_COMPONENT_DEVICE 代表独立深度相机实体,以下简称 深度相机。通过该组件可以控制相机的工作模式、内部 Sensor 曝光同步模式、光学外参等属性。
TY_COMPONENT_DEPTH_CAM 代表深度图像传感器组件。
TY_COMPONENT_IR_CAM_LEFT 代表左红外图像传感器组件。
TY_COMPONENT_IR_CAM_RIGHT 代表右红外图像传感器组件。
TY_COMPONENT_RGB_CAM_LEFT 代表左彩色图像传感器组件。若深度相机仅有一个彩色图像传感器组件,TY_COMPONENT_RGB_CAM 默认代表 TY_COMPONENT_RGB_CAM_LEFT。
TY_COMPONENT_RGB_CAM_RIGHT 代表右彩色图像传感器组件。
属性
深度相机或者各个组件有多种不同的功能参数,SDK 软件工程中称之为属性 (feature)。依据各个属性的特点,SDK 分别为这些属性定义 int、bool、struct、enum 等类型的数据结构。用户可以通过 TYGetInt / TYSetInt / TYGetStruct / TYSetStruct 等类似风格的 API 函数,读取或者写入某个组件的某个属性。
不同组件的属性之间也可以存在联动关系。修改组件的一个属性时,深度相机会同步修改另一个组件的同一属性,这种关系称为绑定 (binding)。绑定关系可以通过查询属性信息得知。
不同型号、不同版本的深度相机支持不同的组件和属性。
备注
通过以下方式,可查询深度相机支持的组件和和属性:
通过 API 可查询深度相机支持的组件和属性。
通过 SDK 示例程序 DumpAllFeatures 可列出当前操作相机的所有组件和支持的属性信息。
通过 SDK 示例程序 DumpAllFeatures -d,可以生成 fetch_config.xml 文件,在该文件中可以查看深度相机支持的组件和和属性。
以 FM851-E1 为例,该相机包含的组件、支持的属性以及属性与组件的隶属关系,请参考下方 fetch_config.xml 文件内的配置描述:
<?xml version="1.0" ?>
<config version="1">
<comprotocol>1.0</comprotocol>
<component addr="0x01000000" id="0x80000000" name="device">
<feature hide="0" id="0x5f00" name="SN" rw="1">207000129217</feature>
<feature hide="0" id="0x5f01" name="vendor" rw="1">Percipio</feature>
<feature hide="0" id="0x5f02" name="model" rw="1">FM851-E1</feature>
<feature hide="0" id="0x5f08" name="user defined name" rw="1">Percipio</feature>
<feature addr="0x204" hide="0" id="0x1202" name="frame per trigger" rw="3">1</feature>
<feature addr="0x208" hide="0" id="0x7523" name="struct trigger mode" rw="3"/>
<feature addr="0x218" hide="0" id="0x7525" name="struct trigger mode ex" rw="3"/>
<feature absaddr="0x64c" hide="0" id="0x1010" name="persistent IP" rw="3"/>
<feature absaddr="0x65c" hide="0" id="0x1011" name="persistent netmask" rw="3"/>
<feature absaddr="0x66c" hide="0" id="0x1012" name="persistent gateway" rw="3"/>
<feature addr="0x400020" hide="0" id="0x1014" inc="1" max="10000" min="0" name="packet delay" rw="3"/>
<feature addr="0x40002c" hide="0" id="0x1017" inc="1" max="1500" min="100" name="packet size" rw="3"/>
<feature addr="0x400024" hide="0" id="0x1016" name="ntp server ip" rw="3"/>
<feature addr="0x214" hide="0" id="0x4207" name="trigger out io" rw="2" writableAtRun="1"/>
<feature addr="0x20c" hide="0" id="0x4205" name="cmos sync" rw="3"/>
<feature hide="0" id="0x4203" name="keep alive onoff" rw="3"/>
<feature hide="0" id="0x1204" inc="1" max="30000" min="2000" name="keep alive timeout" rw="3"/>
<feature addr="0x210" hide="0" id="0x1206" inc="1" max="1300000" min="0" name="trigger delay us" rw="3"/>
<feature addr="0x21C" hide="0" id="0x1208" inc="1" max="1300000" min="1" name="trigger duration us" rw="3"/>
<feature addr="0x220" hide="0" id="0x3209" name="stream async" rw="3">
<entry name="async off" value="0"/>
<entry name="async depth" value="1"/>
<entry name="async rgb" value="2"/>
<entry name="async depth rgb" value="3"/>
<entry name="async all" value="255"/>
</feature>
<feature addr="0x200" hide="0" id="0x3201" name="trig pol" rw="3">
<entry name="falling edge" value="0"/>
<entry name="rising edge" value="1"/>
</feature>
<feature addr="0x228" hide="0" id="0x1210" name="capture time us" rw="1" volatile="1"/>
<feature addr="0x22c" hide="0" id="0x3211" name="sync type" rw="3" volatile="1">
<entry name="sync type none" value="0"/>
<entry name="sync type host" value="1"/>
<entry name="sync type ntp" value="2"/>
<entry name="sync type ptp slave" value="3"/>
<entry name="sync type can" value="4"/>
<entry name="sync type ptp master" value="5"/>
</feature>
<feature addr="0x230" hide="0" id="0x4212" name="sync ready" rw="1" volatile="1"/>
<feature addr="0x234" hide="0" id="0x7526" name="trigger timer list" rw="3" volatile="1" writableAtRun="1"/>
<feature addr="0x238" hide="0" id="0x7527" name="trigger timer period" rw="3" volatile="1" writableAtRun="1"/>
<feature id="0x5f03" name="hardware version" rw="1" hide="0">1.3.0</feature>
<feature id="0x5f04" name="firmware version" rw="1" hide="0">3.13.16</feature>
<build>
<hash>model:AP03B04AM81X_X_X7_F121_DVP;rtl:R1.1.13_0_gcf0ff384e3;kernel:R3.13.16-0-g98f7c91b8d;tycam:R3.5.18-6b7b483c;gevcam:R3.13.16-0-g9ac78d34</hash>
</build>
<config_version>pre_release</config_version>
<tech_model>AM830-GTIS8-47-CBO</tech_model>
<generated_time>2021-10-09T135051</generated_time>
<calibration_time>2021-09-18T033241</calibration_time>
</component>
<component addr="0x02000000" id="0x00010000" name="depth">
<feature hide="0" id="0x210a" name="scale unit" rw="1">1.0</feature>
<feature hide="1" id="0x1003" name="intrinsic width" rw="1">1280</feature>
<feature hide="1" id="0x1004" name="intrinsic height" rw="1">960</feature>
<feature hide="0" id="0x7000" name="depth intrinsic" rw="1"> 1057.0913560361116 0.0 628.5735321044922 0.0 1057.0913560361116 490.0430450439453 0.0 0.0 1.0</feature>
<feature addr="0x10" hide="0" id="0x1104" name="image width" rw="1"/>
<feature addr="0x14" hide="0" id="0x1105" name="image height" rw="1"/>
<feature addr="0x18" hide="0" id="0x3109" name="image mode" rw="3">
<entry name="DEPTH16_640x480" value="0x202801e0"/>
<entry name="DEPTH16_1280x960" value="0x205003c0"/>
<entry name="DEPTH16_320x240" value="0x201400f0"/>
</feature>
</component>
<component addr="0x03000000" id="0x00040000" name="leftir">
<feature addr="0x18" hide="0" id="0x3109" name="image mode" rw="1">
<entry name="mono8 1280x960" value="0x105003c0"/>
</feature>
<feature addr="0x10" hide="0" id="0x1104" name="image width" rw="1">1280</feature>
<feature addr="0x14" hide="0" id="0x1105" name="image height" rw="1">960</feature>
<feature hide="1" id="0x1003" name="intrinsic width" rw="1">1280</feature>
<feature hide="1" id="0x1004" name="intrinsic height" rw="1">960</feature>
<feature hide="0" id="0x7000" name="intrinsic" rw="1"> 1101.9569754361974 0.0 632.6048087423237 0.0 1102.146112084317 476.4526537628572 0.0 0.0 1.0</feature>
<feature hide="0" id="0x7006" name="distortion" rw="1"> -0.4205079032648662 -0.24291850706937249 0.0032100257861444777 0.001990176887732496 0.10267820146085133 -0.1716891282414848 -0.44131454807106735 0.11949232513267484 -0.003917085741072632 0.0008741779334892755 -0.0070731359600290965 0.001578093155976139</feature>
<feature addr="0x324" hide="0" id="0x4510" name="undistort" rw="3"/>
<feature addr="0x304" hide="0" id="0x1301" inc="1" max="1088" min="3" name="exposure time" rw="3" writableAtRun="1"/>
<feature addr="0x310" hide="0" id="0x1303" inc="1" max="255" min="0" name="gain" rw="3" writableAtRun="1"/>
<feature addr="0x328" hide="0" id="0x1524" inc="1" max="3" min="0" name="analog gain" rw="3" writableAtRun="1"/>
</component>
<component addr="0x04000000" id="0x00080000" name="rightir">
<feature addr="0x18" hide="0" id="0x3109" name="image mode" rw="1">
<entry name="mono8 1280x960" value="0x105003c0"/>
</feature>
<feature addr="0x10" hide="0" id="0x1104" name="image width" rw="1">1280</feature>
<feature addr="0x14" hide="0" id="0x1105" name="image height" rw="1">960</feature>
<feature hide="1" id="0x1003" name="intrinsic width" rw="1">1280</feature>
<feature hide="1" id="0x1004" name="intrinsic height" rw="1">960</feature>
<feature hide="0" id="0x7000" name="intrinsic" rw="1"> 1103.249499342999 0.0 630.7622752161499 0.0 1103.2889923805135 509.1805648068269 0.0 0.0 1.0</feature>
<feature hide="0" id="0x7006" name="distortion" rw="1"> 0.1607226089625935 0.04310528484860882 0.004990395649432428 0.0008160696949675246 0.4613061089900877 0.4151237879065313 -0.030265818405065734 0.5510116415135468 -0.0011233127606329815 0.00022496932265199835 -0.010514656609723044 0.0024125513606033243</feature>
<feature hide="0" id="0x7001" name="rightIR to leftIR extrinsic" rw="1"> 0.9999855582465992 -0.0024780726921431236 0.004768904902616075 -78.91377474894921 0.002521488192062276 0.9999552374414395 -0.009119496188449452 0.24564214899255385 -0.0047460926597604315 0.009131389224335365 0.9999470447655208 -0.12529605489830792 0 0 0 1</feature>
<feature bind="0x00044510"/>
<feature addr="0x304" hide="0" id="0x1301" inc="1" max="1088" min="3" name="exposure time" rw="3" writableAtRun="1"/>
<feature addr="0x310" hide="0" id="0x1303" inc="1" max="255" min="0" name="gain" rw="3" writableAtRun="1"/>
<feature addr="0x328" hide="0" id="0x1524" inc="1" max="3" min="0" name="analog gain" rw="3" writableAtRun="1"/>
</component>
<component addr="0x05000000" id="0x00100000" name="rgb">
<feature addr="0x10" hide="0" id="0x1104" name="image width" rw="1" volatile="1"/>
<feature addr="0x14" hide="0" id="0x1105" name="image height" rw="1" volatile="1"/>
<feature addr="0x18" hide="0" id="0x3109" name="image mode" rw="3">
<entry name="yuyv 1280x960" value="0x225003c0"/>
<entry name="yuyv 640x480" value="0x222801e0"/>
<entry name="yuyv 320x240" value="0x221400f0"/>
</feature>
<feature addr="0x224" hide="0" id="0x7305" name="struct aec roi" rw="3" writableAtRun="1"/>
<feature addr="0x300" hide="0" id="0x4300" name="auto exp ctrl" rw="3" writableAtRun="1"/>
<feature addr="0x304" hide="0" id="0x1301" inc="1" max="1088" min="3" name="exposure time" rw="3" writableAtRun="1"/>
<feature addr="0x314" hide="0" id="0x4304" name="auto white balance" rw="3" writableAtRun="1"/>
<feature addr="0x318" hide="0" id="0x1520" inc="1" max="4095" min="1" name="r gain" rw="3" writableAtRun="1"/>
<feature addr="0x31c" hide="0" id="0x1521" inc="1" max="4095" min="1" name="g gain" rw="3" writableAtRun="1"/>
<feature addr="0x320" hide="0" id="0x1522" inc="1" max="4095" min="1" name="b gain" rw="3" writableAtRun="1"/>
<feature addr="0x328" hide="0" id="0x1524" inc="1" max="63" min="1" name="analog gain" rw="3" writableAtRun="1"/>
<feature addr="0x30c" hide="0" id="0x4302" name="auto gain ctrl" rw="3" writableAtRun="1"/>
<feature hide="1" id="0x1003" name="intrinsic width" rw="1">1280</feature>
<feature hide="1" id="0x1004" name="intrinsic height" rw="1">960</feature>
<feature hide="0" id="0x7000" name="rgb intrinsic" rw="1"> 1091.57297791 0.0 639.331289979 0.0 1091.44752035 503.323233757 0.0 0.0 1.0</feature>
<feature hide="0" id="0x7001" name="rgb to leftIR extrinsic" rw="1"> 0.999986864606 -0.00117676964364 0.00498856976817 24.0101958417 0.00117657829273 0.999999306979 4.12924369618e-05 -0.20405264306 -0.00498861490267 -3.54224516683e-05 0.999987556156 -0.534259434997 0.0 0.0 0.0 1.0</feature>
<feature hide="0" id="0x7006" name="distortion" rw="1">0.168248655694 0.0613630693992 0.00541864468694 0.0015374141221 0.514789735342 0.414091440597 0.000124699681652 0.590942851883 -0.00271625606685 0.000477951236185 -0.010361247278 0.00262128322074</feature>
</component>
<component addr="0x07000000" id="0x00400000" name="laser">
<feature addr="0x500" hide="0" id="0x1500" inc="1" max="100" min="0" name="power" rw="3" writableAtRun="1"/>
<feature addr="0x504" hide="0" id="0x4501" name="auto ctrl" rw="3"/>
</component>
<component addr="0x08000000" id="0x01000000" name="histogram"> </component>
<component addr="0x09000000" id="0x02000000" name="storage">
<feature addr="0x100000" hide="0" id="0x600a" name="custom block" rw="3" size="4096" volatile="1"/>
<feature addr="0x200000" hide="0" id="0x600b" name="isp block" rw="3" size="65536" volatile="1"/>
</component>
</config>
根据上述的 fetch_config.xml 文件,可获得该相机包括的组件及各个组件支持的部分属性:
组件 |
部分属性 |
|---|---|
device |
SN、model、packet delay、packet size、trigger out io、cmos sync、keep alive onoff、stream async、trig pol、capture time us、sync type |
depth |
image width、image height、image mode |
leftir / rightir |
image mode、image width、image height、undistort、exposure time、gain、analog gain |
rgb |
image width、image height、image mode、exposure time、auto white balance、r gain、g gain、b gain、analog gain、auto gain ctrl |
laser |
power、 auto ctrl |
histogram |
无属性,该组件专门提供 histogram 数据。 |
storage |
custom block、isp block |
备注
<component></component>一对组件标签内介绍了该组件支持的属性。
<feature></feature>一对属性标签内介绍了该属性的名称、最大值、最小值、读写权限、设置方式,部分属性枚举了可设置值。
读写权限:rw=1 表示只读,rw=3 表示可读写。
设置方式:writableAtRun=1 表示该属性可在相机采图过程中设置,没有此说明的属性则需在相机开始采图前设置。
不同的属性的数据值分为整型(INT)、布尔型(BOOL)、浮点型(FLOAT)、枚举型(ENUM)和结构体型(STRUCT),具体内容请参考属性定义:
typedef enum TY_FEATURE_ID_LIST
{
TY_STRUCT_CAM_INTRINSIC = 0x0000 | TY_FEATURE_STRUCT, ///< see TY_CAMERA_INTRINSIC
TY_STRUCT_EXTRINSIC_TO_DEPTH = 0x0001 | TY_FEATURE_STRUCT, ///< extrinsic between depth cam and current component , see TY_CAMERA_EXTRINSIC
TY_STRUCT_EXTRINSIC_TO_IR_LEFT = 0x0002 | TY_FEATURE_STRUCT, ///< extrinsic between left IR and current compoent, see TY_CAMERA_EXTRINSIC
TY_STRUCT_CAM_DISTORTION = 0x0006 | TY_FEATURE_STRUCT, ///< see TY_CAMERA_DISTORTION
TY_STRUCT_CAM_CALIB_DATA = 0x0007 | TY_FEATURE_STRUCT, ///< see TY_CAMERA_CALIB_INFO
TY_BYTEARRAY_CUSTOM_BLOCK = 0x000A | TY_FEATURE_BYTEARRAY, ///< used for reading/writing custom block
TY_BYTEARRAY_ISP_BLOCK = 0x000B | TY_FEATURE_BYTEARRAY, ///< used for reading/writing fpn block
TY_INT_PERSISTENT_IP = 0x0010 | TY_FEATURE_INT,
TY_INT_PERSISTENT_SUBMASK = 0x0011 | TY_FEATURE_INT,
TY_INT_PERSISTENT_GATEWAY = 0x0012 | TY_FEATURE_INT,
TY_BOOL_GVSP_RESEND = 0x0013 | TY_FEATURE_BOOL,
TY_INT_PACKET_DELAY = 0x0014 | TY_FEATURE_INT, ///< microseconds
TY_INT_ACCEPTABLE_PERCENT = 0x0015 | TY_FEATURE_INT,
TY_INT_NTP_SERVER_IP = 0x0016 | TY_FEATURE_INT, ///< Ntp server IP
TY_INT_PACKET_SIZE = 0x0017 | TY_FEATURE_INT,
TY_STRUCT_CAM_STATISTICS = 0x00ff | TY_FEATURE_STRUCT, ///< statistical information, see TY_CAMERA_STATISTICS
TY_INT_WIDTH_MAX = 0x0100 | TY_FEATURE_INT,
TY_INT_HEIGHT_MAX = 0x0101 | TY_FEATURE_INT,
TY_INT_OFFSET_X = 0x0102 | TY_FEATURE_INT,
TY_INT_OFFSET_Y = 0x0103 | TY_FEATURE_INT,
TY_INT_WIDTH = 0x0104 | TY_FEATURE_INT, ///< Image width
TY_INT_HEIGHT = 0x0105 | TY_FEATURE_INT, ///< Image height
TY_ENUM_IMAGE_MODE = 0x0109 | TY_FEATURE_ENUM, ///< Resolution-PixelFromat mode, see TY_IMAGE_MODE_LIST
//@brief scale unit
//depth image is uint16 pixel format with default millimeter unit ,for some device can output Sub-millimeter accuracy data
//the acutal depth (mm)= PixelValue * ScaleUnit
TY_FLOAT_SCALE_UNIT = 0x010a | TY_FEATURE_FLOAT,
TY_ENUM_TRIGGER_POL = 0x0201 | TY_FEATURE_ENUM, ///< Trigger POL, see TY_TRIGGER_POL_LIST
TY_INT_FRAME_PER_TRIGGER = 0x0202 | TY_FEATURE_INT, ///< Number of frames captured per trigger
TY_STRUCT_TRIGGER_PARAM = 0x0523 | TY_FEATURE_STRUCT, ///< param of trigger, see TY_TRIGGER_PARAM
TY_STRUCT_TRIGGER_PARAM_EX = 0x0525 | TY_FEATURE_STRUCT, ///< param of trigger, see TY_TRIGGER_PARAM_EX
TY_STRUCT_TRIGGER_TIMER_LIST = 0x0526 | TY_FEATURE_STRUCT, ///< param of trigger mode 20, see TY_TRIGGER_TIMER_LIST
TY_STRUCT_TRIGGER_TIMER_PERIOD = 0x0527 | TY_FEATURE_STRUCT, ///< param of trigger mode 21, see TY_TRIGGER_TIMER_PERIOD
TY_BOOL_KEEP_ALIVE_ONOFF = 0x0203 | TY_FEATURE_BOOL, ///< Keep Alive switch
TY_INT_KEEP_ALIVE_TIMEOUT = 0x0204 | TY_FEATURE_INT, ///< Keep Alive timeout
TY_BOOL_CMOS_SYNC = 0x0205 | TY_FEATURE_BOOL, ///< Cmos sync switch
TY_INT_TRIGGER_DELAY_US = 0x0206 | TY_FEATURE_INT, ///< Trigger delay time, in microseconds
TY_BOOL_TRIGGER_OUT_IO = 0x0207 | TY_FEATURE_BOOL, ///< Trigger out IO
TY_INT_TRIGGER_DURATION_US = 0x0208 | TY_FEATURE_INT, ///< Trigger duration time, in microseconds
TY_ENUM_STREAM_ASYNC = 0x0209 | TY_FEATURE_ENUM, ///< stream async switch, see TY_STREAM_ASYNC_MODE
TY_INT_CAPTURE_TIME_US = 0x0210 | TY_FEATURE_INT, ///< capture time in multi-ir
TY_ENUM_TIME_SYNC_TYPE = 0x0211 | TY_FEATURE_ENUM, ///< see TY_TIME_SYNC_TYPE
TY_BOOL_TIME_SYNC_READY = 0x0212 | TY_FEATURE_BOOL,
TY_BOOL_FLASHLIGHT = 0x0213 | TY_FEATURE_BOOL,
TY_INT_FLASHLIGHT_INTENSITY = 0x0214 | TY_FEATURE_INT,
TY_BOOL_AUTO_EXPOSURE = 0x0300 | TY_FEATURE_BOOL, ///< Auto exposure switch
TY_INT_EXPOSURE_TIME = 0x0301 | TY_FEATURE_INT, ///< Exposure time in percentage
TY_BOOL_AUTO_GAIN = 0x0302 | TY_FEATURE_BOOL, ///< Auto gain switch
TY_INT_GAIN = 0x0303 | TY_FEATURE_INT, ///< Sensor Gain
TY_BOOL_AUTO_AWB = 0x0304 | TY_FEATURE_BOOL, ///< Auto white balance
TY_STRUCT_AEC_ROI = 0x0305 | TY_FEATURE_STRUCT, ///< region of aec statistics, see TY_AEC_ROI_PARAM
TY_INT_LASER_POWER = 0x0500 | TY_FEATURE_INT, ///< Laser power level
TY_BOOL_LASER_AUTO_CTRL = 0x0501 | TY_FEATURE_BOOL, ///< Laser auto ctrl
TY_BOOL_UNDISTORTION = 0x0510 | TY_FEATURE_BOOL, ///< Output undistorted image
TY_BOOL_BRIGHTNESS_HISTOGRAM = 0x0511 | TY_FEATURE_BOOL, ///< Output bright histogram
TY_BOOL_DEPTH_POSTPROC = 0x0512 | TY_FEATURE_BOOL, ///< Do depth image postproc
TY_INT_R_GAIN = 0x0520 | TY_FEATURE_INT, ///< Gain of R channel
TY_INT_G_GAIN = 0x0521 | TY_FEATURE_INT, ///< Gain of G channel
TY_INT_B_GAIN = 0x0522 | TY_FEATURE_INT, ///< Gain of B channel
TY_INT_ANALOG_GAIN = 0x0524 | TY_FEATURE_INT, ///< Analog gain
TY_BOOL_HDR = 0x0525 | TY_FEATURE_BOOL,
TY_BYTEARRAY_HDR_PARAMETER = 0x0526 | TY_FEATURE_BYTEARRAY,
TY_BOOL_IMU_DATA_ONOFF = 0x0600 | TY_FEATURE_BOOL, ///< IMU Data Onoff
TY_STRUCT_IMU_ACC_BIAS = 0x0601 | TY_FEATURE_STRUCT, ///< IMU acc bias matrix, see TY_ACC_BIAS
TY_STRUCT_IMU_ACC_MISALIGNMENT = 0x0602 | TY_FEATURE_STRUCT, ///< IMU acc misalignment matrix, see TY_ACC_MISALIGNMENT
TY_STRUCT_IMU_ACC_SCALE = 0x0603 | TY_FEATURE_STRUCT, ///< IMU acc scale matrix, see TY_ACC_SCALE
TY_STRUCT_IMU_GYRO_BIAS = 0x0604 | TY_FEATURE_STRUCT, ///< IMU gyro bias matrix, see TY_GYRO_BIAS
TY_STRUCT_IMU_GYRO_MISALIGNMENT = 0x0605 | TY_FEATURE_STRUCT, ///< IMU gyro misalignment matrix, see TY_GYRO_MISALIGNMENT
TY_STRUCT_IMU_GYRO_SCALE = 0x0606 | TY_FEATURE_STRUCT, ///< IMU gyro scale matrix, see TY_GYRO_SCALE
TY_STRUCT_IMU_CAM_TO_IMU = 0x0607 | TY_FEATURE_STRUCT, ///< IMU camera to imu matrix, see TY_CAMERA_TO_IMU
TY_ENUM_IMU_FPS = 0x0608 | TY_FEATURE_ENUM, ///< IMU fps, see TY_IMU_FPS_LIST
TY_ENUM_DEPTH_QUALITY = 0x0900 | TY_FEATURE_ENUM, ///< the quality of generated depth, see TY_DEPTH_QUALITY
TY_INT_FILTER_THRESHOLD = 0x0901 | TY_FEATURE_INT, ///< the threshold of the noise filter, 0 for disabled
TY_INT_TOF_CHANNEL = 0x0902 | TY_FEATURE_INT, ///< the frequency channel of tof
}TY_FEATURE_ID_LIST;
属性的数据结构示例:
depth、leftir / rightir、rgb 组件支持的分辨率如下:
typedef enum TY_RESOLUTION_MODE_LIST { TY_RESOLUTION_MODE_160x100 = (160<<12)+100, ///< 0x000a0078 TY_RESOLUTION_MODE_160x120 = (160<<12)+120, ///< 0x000a0078 TY_RESOLUTION_MODE_240x320 = (240<<12)+320, ///< 0x000f0140 TY_RESOLUTION_MODE_320x180 = (320<<12)+180, ///< 0x001400b4 TY_RESOLUTION_MODE_320x200 = (320<<12)+200, ///< 0x001400c8 TY_RESOLUTION_MODE_320x240 = (320<<12)+240, ///< 0x001400f0 TY_RESOLUTION_MODE_480x640 = (480<<12)+640, ///< 0x001e0280 TY_RESOLUTION_MODE_640x360 = (640<<12)+360, ///< 0x00280168 TY_RESOLUTION_MODE_640x400 = (640<<12)+400, ///< 0x00280190 TY_RESOLUTION_MODE_640x480 = (640<<12)+480, ///< 0x002801e0 TY_RESOLUTION_MODE_960x1280 = (960<<12)+1280, ///< 0x003c0500 TY_RESOLUTION_MODE_1280x720 = (1280<<12)+720, ///< 0x005002d0 TY_RESOLUTION_MODE_1280x800 = (1280<<12)+800, ///< 0x00500320 TY_RESOLUTION_MODE_1280x960 = (1280<<12)+960, ///< 0x005003c0 TY_RESOLUTION_MODE_1920x1080 = (1920<<12)+1080, ///< 0x00780438 TY_RESOLUTION_MODE_2592x1944 = (2592<<12)+1944, ///< 0x00a20798 }TY_RESOLUTION_MODE_LIST;
depth、leftir / rightir、rgb 组件支持的图像格式如下:
typedef enum TY_PIXEL_FORMAT_LIST{ TY_PIXEL_FORMAT_UNDEFINED = 0, TY_PIXEL_FORMAT_MONO = (TY_PIXEL_8BIT | (0x0 << 24)), ///< 0x10000000 TY_PIXEL_FORMAT_BAYER8GB = (TY_PIXEL_8BIT | (0x1 << 24)), ///< 0x11000000 TY_PIXEL_FORMAT_BAYER8BG = (TY_PIXEL_8BIT | (0x2 << 24)), ///< 0x12000000 TY_PIXEL_FORMAT_BAYER8GR = (TY_PIXEL_8BIT | (0x3 << 24)), ///< 0x13000000 TY_PIXEL_FORMAT_BAYER8RG = (TY_PIXEL_8BIT | (0x4 << 24)), ///< 0x14000000 TY_PIXEL_FORMAT_DEPTH16 = (TY_PIXEL_16BIT | (0x0 << 24)), ///< 0x20000000 TY_PIXEL_FORMAT_YVYU = (TY_PIXEL_16BIT | (0x1 << 24)), ///< 0x21000000, yvyu422 TY_PIXEL_FORMAT_YUYV = (TY_PIXEL_16BIT | (0x2 << 24)), ///< 0x22000000, yuyv422 TY_PIXEL_FORMAT_MONO16 = (TY_PIXEL_16BIT | (0x3 << 24)), ///< 0x23000000, TY_PIXEL_FORMAT_RGB = (TY_PIXEL_24BIT | (0x0 << 24)), ///< 0x30000000 TY_PIXEL_FORMAT_BGR = (TY_PIXEL_24BIT | (0x1 << 24)), ///< 0x31000000 TY_PIXEL_FORMAT_JPEG = (TY_PIXEL_24BIT | (0x2 << 24)), ///< 0x32000000 TY_PIXEL_FORMAT_MJPG = (TY_PIXEL_24BIT | (0x3 << 24)), ///< 0x33000000 }TY_PIXEL_FORMAT_LIST;
备注
使用 TYSetEnum() 接口函数,通过设置图像传感器的 TY_ENUM_IMAGE_MODE 为 TY_IMAGE_MODE_格式_分辨率,即可同时设置图像的输出格式和分辨率。
SDK 示例程序 DumpAllFeatures 可列出当前相机组件所支持的全部图像格式和分辨率。
常用光学参数数据结构如下,可使用 TYGetStruct() 接口函数读取:
typedef struct TY_VECT_3F { float x; float y; float z; }TY_VECT_3F; /// a 3x3 matrix /// |.|.|.| /// | --|---|---| /// | fx| 0| cx| /// | 0| fy| cy| /// | 0| 0| 1| typedef struct TY_CAMERA_INTRINSIC { float data[3*3]; }TY_CAMERA_INTRINSIC; /// a 4x4 matrix /// |.|.|.|.| /// |---|----|----|---| /// |r11| r12| r13| t1| /// |r21| r22| r23| t2| /// |r31| r32| r33| t3| /// | 0 | 0| 0| 1| typedef struct TY_CAMERA_EXTRINSIC { float data[4*4]; }TY_CAMERA_EXTRINSIC; ///camera distortion parameters typedef struct TY_CAMERA_DISTORTION { float data[12];///<Definition is compatible with opencv3.0+ :k1,k2,p1,p2,k3,k4,k5,k6,s1,s2,s3,s4 }TY_CAMERA_DISTORTION; ///camera 's cailbration data ///@see TYGetStruct typedef struct TY_CAMERA_CALIB_INFO { int32_t intrinsicWidth; int32_t intrinsicHeight; TY_CAMERA_INTRINSIC intrinsic; // TY_STRUCT_CAM_INTRINSIC TY_CAMERA_EXTRINSIC extrinsic; // TY_STRUCT_EXTRINSIC_TO_LEFT_IR TY_CAMERA_DISTORTION distortion; // TY_STRUCT_CAM_DISTORTION }TY_CAMERA_CALIB_INFO;
图像获取流程
深度相机的配置和图像获取流程如下图所示:
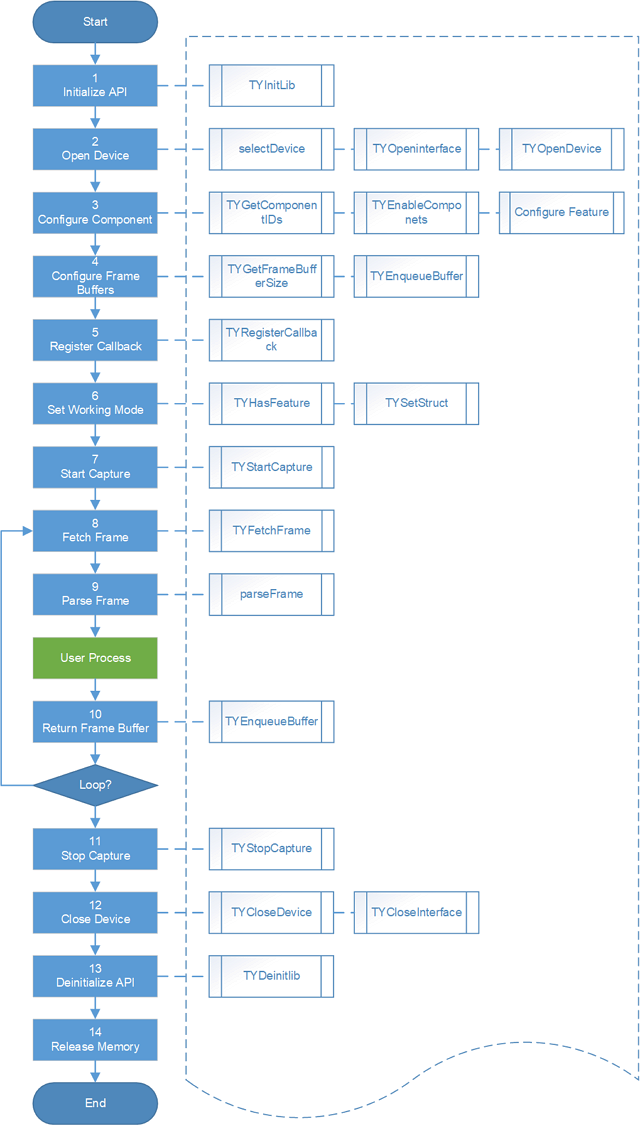
图像获取流程图
下面以 SDK 示例程序 Simpleview_FetchFrame 为例详细说明图像获取流程。
初始化API
TYInitLib 初始化设备对象等数据结构。
打开设备
获取设备列表
打开接口
打开设备
配置组件
查询设备的组件状态
配置组件
int32_t componentIDs = TY_COMPONENT_DEPTH_CAM | TY_COMPONENT_RGB_CAM; TYEnableComponents(hDevice, componentIDs);
配置属性
查询指定属性的信息:
TYGetFeatureInfo() 通过填充结构体 TY_FEATURE_INFO 来获取指定组件的指定属性的信息。如果指定组件不包含所指定的属性,则 TY_FEATURE_INFO 中 isValid 值为 false;如果该组件包含所指定的参数,则 TY_FEATURE_INFO 中 isValid 值为 true。也可以通过 TYGetIntRange 等具体参数类型的 API 接口查询指定功能参数的信息。
常用读写属性函数如下:
TYGetIntRange TYGetInt TYSetInt TYGetFloatRange TYGetFloat TYSetFloat TYGetEnumEntryCount TYGetEnumEntryInfo TYGetEnum TYSetEnum TYGetBool TYSetBool TYGetStringLength TYGetString TYSetString TYGetStruct TYSetStruct
示例
调用 TYSetEnum() 设置深度图像传感器输出数据的格式和分辨率:
LOGD("=== Configure feature, set resolution to 640x480."); ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, TY_IMAGE_MODE_DEPTH16_640x480));
帧缓冲管理
调用 API 查询当前配置下每个帧缓冲的大小。
uint32_t frameSize; ASSERT_OK( TYGetFrameBufferSize(hDevice, &frameSize) ); LOGD(" - Get size of framebuffer, %d", frameSize);
分配深度数据存储空间。
按照实际查询函数返回的帧缓冲的大小分配两组 frameBuffer 空间,并传递给底层驱动缓冲队列,作为数据获取的通道。
驱动内部维护一个缓冲队列(frameBuffer Queue),每帧数据传出时会将填充好的 frameBuffer 作 Dequeue 操作,并完全传出给用户使用。用户完成该帧图像数据处理后,需做 Enqueue 动作以返还该 frameBuffer 给驱动层缓冲队列。用户需要保证新的一帧数据到来时驱动的缓冲队列不为空,否则该帧数据将被丢弃。
LOGD(" - Allocate & enqueue buffers"); char* frameBuffer[2]; frameBuffer[0] = new char[frameSize]; frameBuffer[1] = new char[frameSize]; LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[0], frameSize); ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[0], frameSize) ); LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[1], frameSize); ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[1], frameSize) );
回调函数注册
TYRegisterEventCallback
使用回调函数的方式获取图像数据时,需要注册该函数,当图像数据到达后,该回调函数会主动被执行。在使用主动获取图像模式时,需要调用该函数注册回调函数为 NULL。
LOGD("Register event callback");
ASSERT_OK(TYRegisterEventCallback(hDevice, eventCallback, NULL))
配置工作模式
根据实际需要配置深度相机工作模式,详情请参考 工作模式配置。
启动深度采集
TYStartCapture
如果深度相机工作在模式 1 下,可以使用软件触发接口函数 TYSendSoftTrigger(),通过 USB 接口或者以太网接口发送指令,控制相机图像采集的时机。
获取帧数据
TYFetchFrame
主动获取深度数据模式下,应用可调用该接口获取深度数据。注意回调函数模式下不需要调用。获取数据后,用户程序进行运算处理时,应采用独立线程,避免堵塞图像获取线程的运转。
停止采集
TYStopCapture 停止图像数据采集,相机停止深度数据计算和输出。
关闭设备
TYCloseDevice 关闭设备,TYCloseInterface 释放占用的接口。
释放API
TYDeinitLib 释放 API 后,需要释放分配的内存资源,避免内存泄露。
API 详解
库加载与卸载
调用 Camport SDK 控制相机获取图像前,首先应完成 Camport SDK 库的加载动作,退出应用前应完成库文件的卸载操作。
inline TY_STATUS TYInitLib (void);
TY_CAPI TYDeinitLib (void);
获取 Camport SDK 的版本信息。
TY_CAPI TYLibVersion (TY_VERSION_INFO* version);
接口控制
Camport SDK 同时支持 USB 深度相机和网络深度相机。发现设备前需要更新主机的 USB 接口、以太网接口、无线网络接口状态,获取接口句柄,退出应用程序前应释放接口句柄。
更新接口状态。
TY_CAPI TYUpdateInterfaceList ();
获取接口数量。
TY_CAPI TYGetInterfaceNumber (uint32_t* pNumIfaces);
获取接口列表。
TY_CAPI TYGetInterfaceList (TY_INTERFACE_INFO* pIfaceInfos, uint32_t bufferCount, uint32_t* filledCount);
查询接口是否有效。
TY_CAPI TYHasInterface (const char* ifaceID, bool* value);
打开接口。
TY_CAPI TYOpenInterface (const char* ifaceID, TY_INTERFACE_HANDLE* outHandle);
释放接口句柄。
TY_CAPI TYCloseInterface (TY_INTERFACE_HANDLE ifaceHandle);
设备控制
TYUpdateDeviceList 更新指定接口上挂载的设备列表。
TY_CAPI TYUpdateDeviceList (TY_INTERFACE_HANDLE ifaceHandle);
TYGetDeviceNumber 获取指定接口上挂载的设备数量。
TY_CAPI TYGetDeviceNumber (TY_INTERFACE_HANDLE ifaceHandle, uint32_t* deviceNumber);
TYGetDeviceList 获取指定接口上挂载的设备列表,bufferCount 是按照挂载的设备数量设定的 interface infos array size。
TY_CAPI TYGetDeviceList (TY_INTERFACE_HANDLE ifaceHandle, TY_DEVICE_BASE_INFO* deviceInfos, uint32_t bufferCount, uint32_t* filledDeviceCount);
TYHasDevice 查询指定接口和设备 ID 的设备状态。每一台 Percipio 相机拥有独立的设备 ID。
TY_CAPI TYHasDevice (TY_INTERFACE_HANDLE ifaceHandle, const char* deviceID, bool* value);
TYOpenDevice 打开设备。输入接口句柄和指定的设备 ID,获得打开的相机设备的句柄。
TY_CAPI TYOpenDevice (TY_INTERFACE_HANDLE ifaceHandle, const char* deviceID, TY_DEV_HANDLE* outDeviceHandle, TY_FW_ERRORCODE* outFwErrorcode);
TYOpenDeviceWithIP 在已知指定设备的 IP 地址时,可以使用该接口打开指定 IP 地址的网络相机。输入接口句柄和 IP 地址,获得打开网络相机的句柄。
TY_CAPI TYOpenDeviceWithIP (TY_INTERFACE_HANDLE ifaceHandle, const char* IP, TY_DEV_HANDLE* deviceHandle);
TYGetDeviceInterface 使用已知设备的句柄,查询该设备挂载的接口的句柄。
TY_CAPI TYGetDeviceInterface (TY_DEV_HANDLE hDevice, TY_INTERFACE_HANDLE* pIface);
TYForceDeviceIP 强制设定网络相机的 IP 地址。 已知网络相机的 MAC 地址时,可以通过该接口强制相机临时使用指定的 IP 地址和网关;设备重新启动后,该 IP 配置失效。
TY_CAPI TYForceDeviceIP (TY_INTERFACE_HANDLE ifaceHandle, const char* MAC, const char* newIP, const char* newNetMask, const char* newGateway);
TYCloseDevice 关闭指定设备。
TY_CAPI TYCloseDevice (TY_DEV_HANDLE hDevice, bool reboot);
TYGetDeviceInfo 输入设备句柄,查询设备信息,如接口、版本、厂商等信息。
TY_CAPI TYGetDeviceInfo (TY_DEV_HANDLE hDevice, TY_DEVICE_BASE_INFO* info);
设备信息包含以下数据:
typedef struct TY_DEVICE_BASE_INFO
{
TY_INTERFACE_INFO iface;
char id[32];///<device serial number
char vendorName[32];
char userDefinedName[32];
char modelName[32];///<device model name
TY_VERSION_INFO hardwareVersion; ///<deprecated
TY_VERSION_INFO firmwareVersion;///<deprecated
union {
TY_DEVICE_NET_INFO netInfo;
TY_DEVICE_USB_INFO usbInfo;
};
char buildHash[256];
char configVersion[256];
char reserved[256];
}TY_DEVICE_BASE_INFO;
打开设备的一般操作如下:
LOGD("Init lib");
ASSERT_OK( TYInitLib() );
TY_VERSION_INFO ver;
ASSERT_OK( TYLibVersion(&ver) );
LOGD(" - lib version: %d.%d.%d", ver.major, ver.minor, ver.patch);
std::vector<TY_DEVICE_BASE_INFO> selected;
ASSERT_OK( selectDevice(TY_INTERFACE_ALL, ID, IP, 1, selected) );
ASSERT(selected.size() > 0);
TY_DEVICE_BASE_INFO& selectedDev = selected[0];
ASSERT_OK( TYOpenInterface(selectedDev.iface.id, &hIface) );
ASSERT_OK( TYOpenDevice(hIface, selectedDev.id, &handle) );
其中, select 函数封装如下:
static inline TY_STATUS selectDevice(TY_INTERFACE_TYPE iface
, const std::string& ID, const std::string& IP
, uint32_t deviceNum, std::vector<TY_DEVICE_BASE_INFO>& out)
{
LOGD("Update interface list");
ASSERT_OK( TYUpdateInterfaceList() );
uint32_t n = 0;
ASSERT_OK( TYGetInterfaceNumber(&n) );
LOGD("Got %u interface list", n);
if(n == 0){
LOGE("interface number incorrect");
return TY_STATUS_ERROR;
}
std::vector<TY_INTERFACE_INFO> ifaces(n);
ASSERT_OK( TYGetInterfaceList(&ifaces[0], n, &n) );
ASSERT( n == ifaces.size() );
for(uint32_t i = 0; i < n; i++){
LOGI("Found interface %u:", i);
LOGI(" name: %s", ifaces[i].name);
LOGI(" id: %s", ifaces[i].id);
LOGI(" type: 0x%x", ifaces[i].type);
if(TYIsNetworkInterface(ifaces[i].type)){
LOGI(" MAC: %s", ifaces[i].netInfo.mac);
LOGI(" ip: %s", ifaces[i].netInfo.ip);
LOGI(" netmask: %s", ifaces[i].netInfo.netmask);
LOGI(" gateway: %s", ifaces[i].netInfo.gateway);
LOGI(" broadcast: %s", ifaces[i].netInfo.broadcast);
}
}
out.clear();
std::vector<TY_INTERFACE_TYPE> ifaceTypeList;
ifaceTypeList.push_back(TY_INTERFACE_USB);
ifaceTypeList.push_back(TY_INTERFACE_ETHERNET);
ifaceTypeList.push_back(TY_INTERFACE_IEEE80211);
for(size_t t = 0; t < ifaceTypeList.size(); t++){
for(uint32_t i = 0; i < ifaces.size(); i++){
if(ifaces[i].type == ifaceTypeList[t] && (ifaces[i].type & iface) && deviceNum > out.size()){
TY_INTERFACE_HANDLE hIface;
ASSERT_OK( TYOpenInterface(ifaces[i].id, &hIface) );
ASSERT_OK( TYUpdateDeviceList(hIface) );
uint32_t n = 0;
TYGetDeviceNumber(hIface, &n);
if(n > 0){
std::vector<TY_DEVICE_BASE_INFO> devs(n);
TYGetDeviceList(hIface, &devs[0], n, &n);
for(uint32_t j = 0; j < n; j++){
if(deviceNum > out.size() && ((ID.empty() && IP.empty())
|| (!ID.empty() && devs[j].id == ID)
|| (!IP.empty() && IP == devs[j].netInfo.ip)))
{
if (devs[j].iface.type == TY_INTERFACE_ETHERNET || devs[j].iface.type == TY_INTERFACE_IEEE80211) {
LOGI("*** Select %s on %s, ip %s", devs[j].id, ifaces[i].id, devs[j].netInfo.ip);
} else {
LOGI("*** Select %s on %s", devs[j].id, ifaces[i].id);
}
out.push_back(devs[j]);
}
}
}
TYCloseInterface(hIface);
}
}
}
if(out.size() == 0){
LOGE("not found any device");
return TY_STATUS_ERROR;
}
return TY_STATUS_OK;
}
关闭设备的一般操作如下:
ASSERT_OK( TYCloseDevice(hDevice));
ASSERT_OK( TYCloseInterface(hIface) );
组件控制
TYGetComponentIDs 查询设备支持的组件。
TY_CAPI TYGetComponentIDs (TY_DEV_HANDLE hDevice, int32_t* componentIDs);
TYGetEnabledComponents 查询已使能的组件。
TY_CAPI TYGetEnabledComponents (TY_DEV_HANDLE hDevice, int32_t* componentIDs);
TYEnableComponents 使能指定的设备组件。
TY_CAPI TYEnableComponents (TY_DEV_HANDLE hDevice, int32_t componentIDs);
TYDisableComponents 关闭指定的设备组件。
TY_CAPI TYDisableComponents (TY_DEV_HANDLE hDevice, int32_t componentIDs);
示例:查询并使能左右红外图像传感器和彩色图像传感器。
int32_t allComps;
ASSERT_OK( TYGetComponentIDs(hDevice, &allComps) );
if(allComps & TY_COMPONENT_RGB_CAM && color) {
LOGD("Has RGB camera, open RGB cam");
ASSERT_OK( TYEnableComponents(hDevice, TY_COMPONENT_RGB_CAM) );
}
if (allComps & TY_COMPONENT_IR_CAM_LEFT && ir) {
LOGD("Has IR left camera, open IR left cam");
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_IR_CAM_LEFT));
}
if (allComps & TY_COMPONENT_IR_CAM_RIGHT && ir) {
LOGD("Has IR right camera, open IR right cam");
ASSERT_OK(TYEnableComponents(hDevice, TY_COMPONENT_IR_CAM_RIGHT));
}
帧缓冲管理
TYGetFrameBufferSize 获取当前设备配置需要的帧缓冲空间大小。同一相机,工作在不同图像数据输出模式下,需要的帧缓冲区大小不同。
TY_CAPI TYGetFrameBufferSize (TY_DEV_HANDLE hDevice, uint32_t* bufferSize);
TYEnqueueBuffer 把分配的帧缓冲推入缓冲队列。
TY_CAPI TYEnqueueBuffer (TY_DEV_HANDLE hDevice, void* buffer, uint32_t bufferSize);
TYClearBufferQueue 清空帧缓冲区的缓冲队列。在系统运行过程中,动态调整组件个数时,需要清除 SDK 内部的缓冲队列,并重新申请和推入缓冲队列。
TY_CAPI TYClearBufferQueue (TY_DEV_HANDLE hDevice);
示例:查询帧缓冲的大小,分配 2 帧缓冲并推入帧缓冲队列。
uint32_t frameSize;
ASSERT_OK( TYGetFrameBufferSize(hDevice, &frameSize) );
LOGD(" - Allocate & enqueue buffers");
char* frameBuffer[2];
frameBuffer[0] = new char[frameSize];
frameBuffer[1] = new char[frameSize];
LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[0], frameSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[0], frameSize) );
LOGD(" - Enqueue buffer (%p, %d)", frameBuffer[1], frameSize);
ASSERT_OK( TYEnqueueBuffer(hDevice, frameBuffer[1], frameSize) );
对时设定
TY_ENUM_TIME_SYNC_TYPE = 0x0211 | TY_FEATURE_ENUM,
TY_BOOL_TIME_SYNC_READY = 0x0212 | TY_FEATURE_BOOL,
设置深度相机对时类型,枚举型属性。确认对时设置,布尔型属性。深度相机支持与 HOST、NTP 服务器、 PTP 服务器或 CAN 对时。
默认设置:
若深度相机无 CAN,默认设置为不启用对时功能 TY_TIME_SYNC_TYPE_NONE。
若深度相机有 CAN,默认设置为与 CAN 对时 TY_TIME_SYNC_TYPE_CAN。
定义:
typedef enum TY_TIME_SYNC_TYPE_LIST { TY_TIME_SYNC_TYPE_NONE = 0, TY_TIME_SYNC_TYPE_HOST = 1, TY_TIME_SYNC_TYPE_NTP = 2, TY_TIME_SYNC_TYPE_PTP = 3, TY_TIME_SYNC_TYPE_CAN = 4, TY_TIME_SYNC_TYPE_PTP_MASTER = 5, }TY_TIME_SYNC_TYPE_LIST; typedef int32_t TY_TIME_SYNC_TYPE;
操作:通过 TYSetEnum() 的接口设置对时类型,再通过读取 TY_BOOL_TIME_SYNC_READY 确认是否完成对时。
示例:设置对时类型为与 HOST 对时。设置该对时类型后,主机自动下发当前时间,随后每隔 6s下发对时一次。
LOGD("Set type of time sync mechanism"); ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_DEVICE, TY_ENUM_TIME_SYNC_TYPE, TY_TIME_SYNC_TYPE_HOST)); LOGD("Wait for time sync ready"); while (1) { bool sync_ready; ASSERT_OK(TYGetBool(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_TIME_SYNC_READY, &sync_ready)); if (sync_ready) { break; } MSLEEP(10); }
工作模式配置
TY_STRUCT_TRIGGER_PARAM = 0x0523 | TY_FEATURE_STRUCT,
深度相机的工作模式配置。结构体属性。定义如下:
typedef enum TY_TRIGGER_MODE_LIST
{
TY_TRIGGER_MODE_OFF = 0,
TY_TRIGGER_MODE_SLAVE = 1,
TY_TRIGGER_MODE_M_SIG = 2,
TY_TRIGGER_MODE_M_PER = 3,
TY_TRIGGER_MODE_SIG_PASS = 18,
TY_TRIGGER_MODE_PER_PASS = 19,
TY_TRIGGER_MODE_TIMER_LIST = 20,
TY_TRIGGER_MODE_TIMER_PERIOD= 21,
}TY_TRIGGER_MODE_LIST;
typedef int16_t TY_TRIGGER_MODE;
typedef struct TY_TRIGGER_PARAM
{
TY_TRIGGER_MODE mode;
int8_t fps;
int8_t rsvd;
}TY_TRIGGER_PARAM;
//@see sample SimpleView_TriggerMode, only for TY_TRIGGER_MODE_SIG_PASS/TY_TRIGGER_MODE_PER_PASS
typedef struct TY_TRIGGER_PARAM_EX
{
TY_TRIGGER_MODE mode;
union
{
struct
{
int8_t fps;
int8_t duty;
int32_t laser_stream;
int32_t led_stream;
int32_t led_expo;
int32_t led_gain;
};
struct
{
int32_t ir_gain[2];
};
int32_t rsvd[32];
};
}TY_TRIGGER_PARAM_EX;
//@see sample SimpleView_TriggerMode, only for TY_TRIGGER_MODE_TIMER_LIST
TY_TRIGGER_MODE_OFF 配置深度相机工作在模式 0,相机连续采集图像并以最高帧率输出图像数据。
LOGD("=== Disable trigger mode"); TY_TRIGGER_PARAM trigger; trigger.mode = TY_TRIGGER_MODE_OFF; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger)));
TY_TRIGGER_MODE_SLAVE 配置深度相机工作在模式 1,相机收到软触发指令或者硬件触发信号后采集图像并输出图像数据。
LOGD("=== Set trigger to slave mode"); TY_TRIGGER_PARAM trigger; trigger.mode = TY_TRIGGER_MODE_SLAVE; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger)));
TY_TRIGGER_MODE_M_SIG 配置主设备(相机)工作在模式 2,多台从设备(相机)工作在模式 1,以实现多台深度相机级联触发,同时采集图像。
主设备收到上位机发送的软件触发信号后,通过硬件 TRIGGER OUT 接口输出触发信号,同时触发自身采集并输出深度图;从设备收到主设备的硬件触发信号后,采集并输出深度图。
LOGD("=== Set trigger mode"); if (((strcmp(selected[i].id, list[0]) == 0) && (list.size() > 0)) || ((count == 0) && (list.size() == 0))) { LOGD("=== set master device, id: %s", cams[count].sn); cams[count].tag = std::string(cams[count].sn) + "_master"; TY_TRIGGER_PARAM param; param.mode = TY_TRIGGER_MODE_M_SIG; ASSERT_OK(TYSetStruct(cams[count].hDev, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, (void*)¶m, sizeof(param))); } else { cams[count].tag = std::string(cams[count].sn) + "_slave"; TY_TRIGGER_PARAM param; param.mode = TY_TRIGGER_MODE_SLAVE; ASSERT_OK(TYSetStruct(cams[count].hDev, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, (void*)¶m, sizeof(param))); }
TY_TRIGGER_MODE_M_PER 配置主设备(相机)工作在模式 3,多台从设备(相机)工作在模式 1,以实现多台深度相机按照设置的帧率级联触发,同时采集图像。
主设备按照设置的帧率,通过硬件 TRIGGER OUT 接口输出触发信号,同时触发自身采集并输出深度图;从设备收到主设备的硬件触发信号后,采集并输出深度图。
备注
设置的帧率不可大于 15,且不能超过相机处理能力(工作模式 0 下相机的出图帧率)。
在工作模式 3 下(不连接从设备),主设备可以按照设置的帧率平滑的输出图像,适用于需要特定帧率接收图像或者图像数据处理能力有限的平台。
LOGD("=== Set trigger mode"); if (((strcmp(selected[i].id, list[0]) == 0) && (list.size() > 0)) || ((count == 0) && (list.size() == 0))) { LOGD("=== set master device"); cams[count].tag = std::string(cams[count].sn) + "_master"; TY_TRIGGER_PARAM param; param.mode = TY_TRIGGER_MODE_M_PER; param.fps = 5; ASSERT_OK(TYSetStruct(cams[count].hDev, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, (void*)¶m, sizeof(param))); } else { cams[count].tag = std::string(cams[count].sn) + "_slave"; TY_TRIGGER_PARAM param; param.mode = TY_TRIGGER_MODE_SLAVE; ASSERT_OK(TYSetStruct(cams[count].hDev, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, (void*)¶m, sizeof(param))); }
TY_TRIGGER_MODE_SIG_PASS 配置深度相机工作在模式 18,相机每接收到一次软触发指令或硬触发信号后,便按照设置的帧率,以 1+duty 的方式采集一轮图像并输出图像数据(1:出 1 次泛光;duty:出 duty 次激光)。
备注
设置的帧率不能超过相机处理能力,即工作模式 0 下相机的出图帧率。
LOGD("=== Set trigger to trig mode 18"); TY_TRIGGER_PARAM_EX trigger; trigger.mode = TY_TRIGGER_MODE_SIG_PASS; trigger.fps = 10; // [1, 15] trigger.duty = duty; trigger.laser_stream = TY_COMPONENT_DEPTH_CAM | TY_COMPONENT_RGB_CAM; trigger.led_stream = TY_COMPONENT_IR_CAM_LEFT | TY_COMPONENT_RGB_CAM; trigger.led_expo = 1088; // [3, 1088] trigger.led_gain = 32; // [0, 255] ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM_EX, &trigger, sizeof(trigger)));
TY_TRIGGER_MODE_PER_PASS 配置深度相机工作在模式 19,相机接收到一次软触发或者硬触发信号后,便按照设置的帧率,以 1+duty 的方式连续采集图像并输出图像数据(1:出 1 次泛光;duty:出 duty 次激光)。
备注
设置的帧率不能超过相机处理能力,即工作模式 0 下相机的出图帧率。
LOGD("=== Set trigger to trig mode 19"); TY_TRIGGER_PARAM_EX trigger; trigger.mode = TY_TRIGGER_MODE_PER_PASS; trigger.fps = 10; // [1, 15] trigger.duty = duty; trigger.laser_stream = TY_COMPONENT_DEPTH_CAM | TY_COMPONENT_RGB_CAM; trigger.led_stream = TY_COMPONENT_IR_CAM_LEFT | TY_COMPONENT_RGB_CAM; trigger.led_expo = 1088; // [3,1088] trigger.led_gain = 32; // [0, 255] ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM_EX, &trigger, sizeof(trigger)));
TY_TRIGGER_MODE_TIMER_LIST 配置深度相机工作在模式 20(列表式定时触发模式),相机根据设置的触发开始时间(start_time_us)、触发次数(offset_us_count)和每两帧的时间间隔数组(offset_us_list[ ]),定时采集(1 + offset_us_count)张图像并输出图像数据。此工作模式要求相机先启动 PTP 对时,详情请参考 对时设定。
定义:
typedef struct TY_TRIGGER_TIMER_LIST { uint64_t start_time_us; // 0 for disable uint32_t offset_us_count; // length of offset_us_list uint32_t offset_us_list[50]; // used in TY_TRIGGER_MODE_TIMER_LIST mode }TY_TRIGGER_TIMER_LIST;
操作:
通过 TY_TRIGGER_MODE_TIMER_LIST 配置深度相机工作在模式 20。
LOGD("=== Set trigger to trig mode 20"); TY_TRIGGER_PARAM trigger; trigger.mode = TY_TRIGGER_MODE_TIMER_LIST; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger)));
通过 TY_TRIGGER_TIMER_LIST 设置一个列表触发定时器,offset_us_count ≤ 50。
LOGD("=== Set trigger timer list"); TY_TRIGGER_TIMER_LIST list_timer; list_timer.start_time_us = (getSystemTime() + 3000) * 1000; list_timer.offset_us_count = 4; list_timer.offset_us_list[0] = 1000000; list_timer.offset_us_list[1] = 1000000; list_timer.offset_us_list[2] = 1000000; list_timer.offset_us_list[3] = 1000000; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_TIMER_LIST, &list_timer, sizeof(list_timer)));
若需关闭列表触发定时器,则将 start_time_us 设置为 0。
TY_TRIGGER_TIMER_LIST list_timer; list_timer.start_time_us = 0; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_TIMER_LIST, & list_timer, sizeof(list_timer)));
TY_TRIGGER_MODE_TIMER_PERIOD 配置深度相机工作在模式 21(周期式定时触发模式),相机根据设置触发开始时间(start_time_us)、触发次数(trigger_count)和触发时间间隔(peroid_us),每间隔 peroid_us 采集⼀帧图像,共采集 trigger_count 张图像并输出图像数据。此工作模式要求相机先启动 PTP 对时,详情请参考 对时设定。
定义:
typedef struct TY_TRIGGER_TIMER_PERIOD { uint64_t start_time_us; // 0 for disable uint32_t trigger_count; uint32_t period_us; // used in TY_TRIGGER_MODE_TIMER_PERIOD mode }TY_TRIGGER_TIMER_PERIOD;
操作:
通过 TY_TRIGGER_MODE_TIMER_PERIOD 配置深度相机工作在模式 21。
LOGD("=== Set trigger to trig mode 21"); TY_TRIGGER_PARAM trigger; trigger.mode = TY_TRIGGER_MODE_TIMER_PERIOD; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger)));
通过 TY_TRIGGER_TIMER_PERIOD 设置一个周期触发定时器。
TY_TRIGGER_TIMER_PERIOD period_timer; period_timer.start_time_us = (getSystemTime() + 3000) * 1000; period_timer.trigger_count = 10; period_timer.period_us = 1000000; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_TIMER_PERIOD, &period_timer, sizeof(period_timer)));
若需关闭周期触发定时器,则将 start_time_us 设置为 0。
TY_TRIGGER_TIMER_PERIOD period_timer; period_timer.start_time_us = 0; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_TIMER_PERIOD, & period_timer, sizeof(period_timer)));
启停管理
TYStartCapture 设备组件、组件特性功能配置完成后,调用该接口启动设备,开始图像采集和计算输出,运行结束后调用 TYStopCapture 停止图像采集操作。
TY_CAPI TYStartCapture (TY_DEV_HANDLE hDevice);
TY_CAPI TYStopCapture (TY_DEV_HANDLE hDevice);
软件触发
TYSendSoftTrigger 相机设备工作于模式 1、模式 2 时(请参考 工作模式 ),可以使用软件触发接口函数 TYSendSoftTrigger(),通过 USB 接口或者以太网接口发送触发指令到深度相机,相机接收到该指令后进行一次图像采集和深度计算,并输出相应图像数据。
TY_CAPI TYSendSoftTrigger (TY_DEV_HANDLE hDevice);
状态报告
设备掉线或者设备 License 状态异常时,该回调函数可以收到 TY_EVENT_DEVICE_OFFLINE 或 TY_EVENT_LICENSE_ERROR 事件通知。
TY_CAPI TYRegisterEventCallback (TY_DEV_HANDLE hDevice, TY_EVENT_CALLBACK callback, void* userdata);
数据接收
深度相机通过 USB 接口或者以太网接口输出深度数据, 上位机通过 SDK 的 FetchFrame (主动获取) API 获取深度图像数据。
深度相机的数据输出与上位机之间通过 frameBuffer Queue 进行缓冲。在 Queue 中的 frameBuffer 全部被占用的情况下,深度相机会停止数据发送。为避免相机发送的图像数据流被阻塞,上位机获取图像数据后,应及时调用 TYEnqueueBuffer 归还 frameBuffer。
如果上位机接收或者数据处理能力低于深度相机的图像输出能力,可使用软件触发或者硬件触发的方式限制图像计算和输出的帧率,同时也可以降低相机功耗。SDK 示例程序 SimpleView_Callback 和 SimpleView_FetchFrame 分别提供了在独立应用线程进行图像应用处理和直接在图像收取线程中进行图像应用处理的两种框架示例。
FetchFrame 数据接收函数,输入设备句柄并在指定的时间内等待有效数据帧,指定时间内没有收到数据帧,函数会返回并报告错误状态。
TY_CAPI TYFetchFrame (TY_DEV_HANDLE hDevice, TY_FRAME_DATA* frame, int32_t timeout);
属性设置
属性有无查询
TYHasFeature 输入设备句柄、组件 ID,查询是否支持 featureID 对应的属性。
TY_CAPI TYHasFeature (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, bool* value);
属性信息查询
TYGetFeatureInfo 输入设备句柄、组件 ID,查询 featureID 对应属性的信息。
TY_CAPI TYGetFeatureInfo (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_FEATURE_INFO* featureInfo);
属性的信息包括:访问属性(TY_ACCESS_MODE,读、写)、是否支持图像运行时配置以及该属性相关联的组件和其他属性 ID。
typedef struct TY_FEATURE_INFO
{
bool isValid; ///< true if feature exists, false otherwise
TY_ACCESS_MODE accessMode; ///< feature access privilege
bool writableAtRun; ///< feature can be written while capturing
char reserved0[1];
TY_COMPONENT_ID componentID; ///< owner of this feature
TY_FEATURE_ID featureID; ///< feature unique id
char name[32]; ///< describe string
int32_t bindComponentID; ///< component ID current feature bind to
int32_t bindFeatureID; ///< feature ID current feature bind to
char reserved[252];
}TY_FEATURE_INFO;
属性分类操作接口
属性操作 API 通常包含的输入参数有相机句柄 hDevice、属性所属组件的 ID componentID、待操作属性 ID featureID、待接收或者写入的数据参数, 依据不同的属性类型选择不同的操作 API,即遵循相机、组件、属性的隶属关系和属性类型进行操作。
组件属性的数据类型共有 7 种,SDK 使用同一个 API 对同一类型的不同属性进行操作。
typedef enum TY_FEATURE_TYPE_LIST
{
TY_FEATURE_INT = 0x1000,
TY_FEATURE_FLOAT = 0X2000,
TY_FEATURE_ENUM = 0x3000,
TY_FEATURE_BOOL = 0x4000,
TY_FEATURE_STRING = 0x5000,
TY_FEATURE_BYTEARRAY = 0x6000,
TY_FEATURE_STRUCT = 0x7000,
}TY_FEATURE_TYPE_LIST;
整型属性的操作接口:
TY_CAPI TYGetIntRange (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_INT_RANGE* intRange);
TY_CAPI TYGetInt (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, int32_t* value);
TY_CAPI TYSetInt (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, int32_t value);
浮点型属性的操作接口:
TY_CAPI TYGetFloatRange (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_FLOAT_RANGE* floatRange);
TY_CAPI TYGetFloat (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, float* value);
TY_CAPI TYSetFloat (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, float value);
枚举型属性的操作接口:
TY_CAPI TYGetEnumEntryCount (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint32_t* entryCount);
TY_CAPI TYGetEnumEntryInfo (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_ENUM_ENTRY* entries, uint32_t entryCount, uint32_t* filledEntryCount);
TY_CAPI TYGetEnum (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, int32_t* value);
TY_CAPI TYSetEnum (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, int32_t value);
布尔型属性的操作接口:
TY_CAPI TYGetBool (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, bool* value);
TY_CAPI TYSetBool (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, bool value);
字符串型属性的操作接口:
TY_CAPI TYGetStringLength (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint32_t* length);
TY_CAPI TYGetString (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, char* buffer, uint32_t bufferSize);
TY_CAPI TYSetString (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, const char* buffer);
结构体型属性的操作接口:
TY_CAPI TYGetStruct (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, void* pStruct, uint32_t structSize);
TY_CAPI TYSetStruct (TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, void* pStruct, uint32_t structSize);
属性说明
不同型号的 Percipio 深度相机拥有不同的属性配置,通过遍历深度相机的组件和属性列表,可以获取产品准确的配置信息。建议使用 SDK 示例程序 DumpAllFeatures 遍历设备支持的属性。
组件光学参数
TY_STRUCT_CAM_INTRINSIC = 0x0000 | TY_FEATURE_STRUCT,
红外图像传感器组件、彩色图像传感器组件、深度图像传感器组件的内参。结构体型属性,数据结构为 3x3 浮点数组。定义如下:
/// a 3x3 matrix /// |.|.|.| /// | --|---|---| /// | fx| 0| cx| /// | 0| fy| cy| /// | 0| 0| 1| typedef struct TY_CAMERA_INTRINSIC { float data[3*3]; }TY_CAMERA_INTRINSIC;
TY_STRUCT_EXTRINSIC_TO_LEFT_IR = 0x0001 | TY_FEATURE_STRUCT,
组件外参。右侧红外图像传感器组件或者彩色图像传感器组件相对左侧红外图像传感器组件的外参数据。结构体型属性,数据结构为 4x4 浮点数组。定义如下:
/// a 4x4 matrix /// |.|.|.|.| /// |---|----|----|---| /// |r11| r12| r13| t1| /// |r21| r22| r23| t2| /// |r31| r32| r33| t3| /// | 0 | 0| 0| 1| // 该参数用于初始坐标系中的坐标点向新的坐标系转换 // R11 R12 R13 T1分别为x在新的坐标系中x y z三轴的旋转系数及偏移量 // R21 R22 R23 T2分别为y在新的坐标系中x y z三轴的旋转系数及偏移量 // R31 R32 R33 T3分别为z在新的坐标系中x y z三轴的旋转系数及偏移量 typedef struct TY_CAMERA_EXTRINSIC { float data[4*4]; }TY_CAMERA_EXTRINSIC; [r11, r12, r13, t1, r21, r22, r23, t2, r31, r32, r33, t3, 0, 0, 0, 1]
TY_STRUCT_CAM_DISTORTION = 0x0006 | TY_FEATURE_STRUCT,
红外图像传感器或者彩色图像传感器组件的光学畸变参数。结构体型属性,数据结构为 12 个元素的浮点数组。定义如下:
// k1 k2 k3 k4 k5 k6是基于理想模型的径向畸变系数 // p1 p2 为切向畸变系数 // s1 s2 s3 s4 为薄棱镜畸变系数 ///camera distortion parameters typedef struct TY_CAMERA_DISTORTION { float data[12];///<Definition is compatible with opencv3.0+ :k1,k2,p1,p2,k3,k4,k5,k6,s1,s2,s3,s4 }TY_CAMERA_DISTORTION;
TY_STRUCT_CAM_CALIB_DATA = 0x0007 | TY_FEATURE_STRUCT,
红外图像传感器组件、彩色图像传感器组件的标定参数组合,可获取内参数据、外参数据和畸变数据。结构体内包含相机出厂前标定的标定尺寸,内参,外参,畸变参数。该标定参数是在特定分辨率下标定计算出来的,与图像的分辨率存在转换关系。SDK 提供的相关 API 会根据实际图像分辨率自动调整输出的参数。
typedef struct TY_CAMERA_CALIB_INFO { int32_t intrinsicWidth; int32_t intrinsicHeight; TY_CAMERA_INTRINSIC intrinsic; // TY_STRUCT_CAM_INTRINSIC TY_CAMERA_EXTRINSIC extrinsic; // TY_STRUCT_EXTRINSIC_TO_LEFT_IR TY_CAMERA_DISTORTION distortion; // TY_STRUCT_CAM_DISTORTION }TY_CAMERA_CALIB_INFO;
示例:获取标定参数,详情请参考 SDK 示例程序 SimpleView_Registration。
struct CallbackData { int index; TY_ISP_HANDLE IspHandle; TY_DEV_HANDLE hDevice; DepthRender* render; DepthViewer* depthViewer; bool needUndistort; float scale_unit; TY_CAMERA_CALIB_INFO depth_calib; TY_CAMERA_CALIB_INFO color_calib; }; CallbackData cb_data; LOGD("=== Read depth calib info"); ASSERT_OK( TYGetStruct(hDevice, TY_COMPONENT_DEPTH_CAM, TY_STRUCT_CAM_CALIB_DATA , &cb_data.depth_calib, sizeof(cb_data.depth_calib)) ); LOGD("=== Read color calib info"); ASSERT_OK( TYGetStruct(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_CAM_CALIB_DATA , &cb_data.color_calib, sizeof(cb_data.color_calib)) );
网络相关属性
TY_INT_PERSISTENT_IP = 0x0010 | TY_FEATURE_INT,
网络深度相机的静态 IP 地址。
TY_INT_PERSISTENT_SUBMASK = 0x0011 | TY_FEATURE_INT,
网络深度相机的静态 IP 地址掩码。
TY_INT_PERSISTENT_GATEWAY = 0x0012 | TY_FEATURE_INT,
网络深度相机的静态 IP 网关。
const char * newIP = "0.0.0.0"; const char * newNetmask = "0.0.0.0"; const char * newGateway = "0.0.0.0"; int32_t ip_i[4]; uint8_t ip_b[4]; int32_t ip32; sscanf(newIP, "%d.%d.%d.%d", &ip_i[0], &ip_i[1], &ip_i[2], &ip_i[3]); ip_b[0] = ip_i[0];ip_b[1] = ip_i[1];ip_b[2] = ip_i[2];ip_b[3] = ip_i[3]; ip32 = TYIPv4ToInt(ip_b); LOGI("Set persistent IP 0x%x(%d.%d.%d.%d)", ip32, ip_b[0], ip_b[1], ip_b[2], ip_b[3]); ASSERT_OK( TYSetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_PERSISTENT_IP, ip32) ); sscanf(newNetmask, "%d.%d.%d.%d", &ip_i[0], &ip_i[1], &ip_i[2], &ip_i[3]); ip_b[0] = ip_i[0];ip_b[1] = ip_i[1];ip_b[2] = ip_i[2];ip_b[3] = ip_i[3]; ip32 = TYIPv4ToInt(ip_b); LOGI("Set persistent Netmask 0x%x(%d.%d.%d.%d)", ip32, ip_b[0], ip_b[1], ip_b[2], ip_b[3]); ASSERT_OK( TYSetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_PERSISTENT_SUBMASK, ip32) ); sscanf(newGateway, "%d.%d.%d.%d", &ip_i[0], &ip_i[1], &ip_i[2], &ip_i[3]); ip_b[0] = ip_i[0];ip_b[1] = ip_i[1];ip_b[2] = ip_i[2];ip_b[3] = ip_i[3]; ip32 = TYIPv4ToInt(ip_b); LOGI("Set persistent Gateway 0x%x(%d.%d.%d.%d)", ip32, ip_b[0], ip_b[1], ip_b[2], ip_b[3]); ASSERT_OK( TYSetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_PERSISTENT_GATEWAY, ip32) );
TY_BOOL_GVSP_RESEND = 0x0013 | TY_FEATURE_BOOL,
网络深度相机的图像数据流重传开关。默认图像数据流不做重传。
TY_INT_PACKET_DELAY = 0x0014 | TY_FEATURE_INT, ///< microseconds
网络深度相机的数据传输的延时等待时间,用于缓冲网络数据发送雍塞。默认为 100 微秒。
TY_INT_PACKET_SIZE = 0x0017 | TY_FEATURE_INT,
网络深度相机数据传输时,分组发送到链路上最大传输单元的大小,范围 100 ~ 1500,默认为 1500。
TY_INT_ACCEPTABLE_PERCENT = 0x0015 | TY_FEATURE_INT,
网络深度相机的丢包率门槛,超过该门槛开启重传。
TY_INT_NTP_SERVER_IP = 0x0016 | TY_FEATURE_INT,
网络深度相机的 NTP 服务器 IP 地址,默认使用时间服务器为 cn.ntp.org.cn。
TY_STRUCT_CAM_STATISTICS = 0x00ff | TY_FEATURE_STRUCT,
网络深度相机统计数据信息。结构体型属性,定义如下:
typedef struct TY_CAMERA_STATISTICS { uint64_t packetReceived; uint64_t packetLost; uint64_t imageOutputed; uint64_t imageDropped; uint8_t rsvd[1024]; }TY_CAMERA_STATISTICS;
触发设置
TY_ENUM_TRIGGER_POL = 0x0201 | TY_FEATURE_ENUM,
深度相机的触发信号设定。枚举型属性。深度相机支持下降沿触发和上升沿触发,默认设置是下降沿触发。定义如下:
typedef enum TY_TRIGGER_POL_LIST { TY_TRIGGER_POL_FALLINGEDGE = 0, TY_TRIGGER_POL_RISINGEDGE = 1, }TY_TRIGGER_POL_LIST;
TY_INT_FRAME_PER_TRIGGER = 0x0202 | TY_FEATURE_INT,
深度相机接收到一次软触发指令或者硬件触发信号后,输出的图像的帧数量。默认输出 1 帧。
TY_INT_TRIGGER_DELAY_US = 0x0206 | TY_FEATURE_INT,
延迟触发。深度相机收到硬件触发信号后,延时设置的延迟时间后进行图像采集,单位是微秒。最大延迟时间 1300000 微秒。
LOGD("=== Set trigger to slave mode"); TY_TRIGGER_PARAM trigger; trigger.mode = TY_TRIGGER_MODE_SLAVE; ASSERT_OK(TYSetStruct(hDevice, TY_COMPONENT_DEVICE, TY_STRUCT_TRIGGER_PARAM, &trigger, sizeof(trigger))); //notice: trigger delay only be enabled in trigger salve mode and only work for hardware trigger. // delay time unit is microsecond, the maximum value is 1.3s int32_t time = 1000; ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_TRIGGER_DELAY_US, time));
TY_BOOL_TRIGGER_OUT_IO = 0x0207 | TY_FEATURE_BOOL,
触发 IO 输出控制。在深度相机工作在模式 0 或者模式 1 时,可以通过该属性控制触发输出接口工作在普通 IO 模式。设置该值为 false 时,进入无效触发的状态;设置该值为 true 时,输出有效的触发信号(参考 TY_ENUM_TRIGGER_POL 属性设置)。深度相机工作在模式 2 或者模式 3 时,该属性不能使用。
链路监测
TY_BOOL_KEEP_ALIVE_ONOFF = 0x0203 | TY_FEATURE_BOOL,
深度相机状态保持。SDK 与相机维持通信状态保持机制。默认为 true。一旦发生连接异常,将激活 TYRegisterEventCallback 注册的回调函数。用户可在回调函数中进行重连等异常处理操作。
TY_INT_KEEP_ALIVE_TIMEOUT = 0x0204 | TY_FEATURE_INT, ///< Keep Alive timeout
深度相机状态保持时间设置。在该时间内未收到状态保持数据包,则判定系统与设备的连接出现异常。单位是毫秒。USB 相机默认是 15 秒,网络相机默认 3 秒。
曝光设置
TY_BOOL_AUTO_AWB = 0x0304 | TY_FEATURE_BOOL,
自动白平衡控制。自动白平衡功能适用于彩色图像传感器,通过调整 R、G、B 三个通道的数字增益值实现色彩空间的平衡。若要手动设置 R、G、B 三个通道的数字增益,需先关闭自动白平衡功能,否则自动白平衡功能会与手动设置的 R、G、B 通道数字增益冲突,影响图像效果。
TY_BOOL_AUTO_EXPOSURE = 0x0300 | TY_FEATURE_BOOL,
自动曝光时间控制。彩色图像传感器组件的自动曝光开关。部分深度相机的光学组件支持图像自动曝光。
TY_INT_EXPOSURE_TIME = 0x0301 | TY_FEATURE_INT,
曝光时间。红外或者彩色图像传感器组件的曝光时间设置。不同光学传感器、不同帧率配置下的行曝光时间可配置范围不同,最大行数和最小行数可使用 TYGetIntRange 接口查询。通过 API 设置曝光时间前,如果图像传感器支持自动曝光时间设置,需要关闭自动曝光时间设置功能。
//shutdown the Auto Exposure time function of the rgb image ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_RGB_CAM, TY_BOOL_AUTO_EXPOSURE, false)); //Adjust the Exposure time of the rgb image TY_INT_RANGE range; ASSERT_OK(TYGetIntRange(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, &range)); int32_t tmp; ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, (range.min + range.max) / 2)); ASSERT_OK(TYGetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_EXPOSURE_TIME, &tmp)); if (tmp != (range.min + range.max) / 2) { LOGD("set rgb image exposure time failed"); }
TY_BOOL_AUTO_GAIN = 0x0302 | TY_FEATURE_BOOL,
自动增益控制。彩色图像传感器组件的自动增益调整开关。部分深度相机的光学组件允许自动调整增益。
TY_INT_ANALOG_GAIN = 0x0524 | TY_FEATURE_INT,
模拟曝光增益。红外或者彩色图像传感器组件的模拟曝光增益设置。不同光学传感器、不同帧率配置下的增益可调范围不同。通过 API 设置彩色图像传感器组件的模拟曝光增益时,需要先关闭自动增益调整功能。
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_INT_ANALOG_GAIN, 4)); //shutdown the Auto Gain function of the RGB image ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_RGB_CAM, TY_BOOL_AUTO_GAIN, false)); ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_ANALOG_GAIN, 4));
TY_INT_GAIN = 0x0303 | TY_FEATURE_INT,
红外传感器数字曝光增益。红外图像传感器组件的数字曝光增益设置。不同光学传感器、不同帧率配置下的增益可调范围不同。
int32_t value; TY_INT_RANGE range; // get the range of digital gain ASSERT_OK(TYGetIntRange(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_INT_GAIN, &range)); // set the max digital gain ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_INT_GAIN, range.max));
TY_INT_R_GAIN = 0x0520 | TY_FEATURE_INT,
TY_INT_G_GAIN = 0x0521 | TY_FEATURE_INT,
TY_INT_B_GAIN = 0x0522 | TY_FEATURE_INT,
彩色传感器数字曝光增益。彩色图像传感器模组的数字曝光增益需要通过 R、G、B 三通道独立设置。通过 API 设置增益时,如果传感器支持 AWB 设置,需要先关闭 AWB 功能。
//shutdown the AWB function of the RGB image ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_RGB_CAM, TY_BOOL_AUTO_AWB, false)); ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_R_GAIN, 2)); ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_G_GAIN, 2)); ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_RGB_CAM, TY_INT_B_GAIN, 2));
自动曝光ROI
TY_STRUCT_AEC_ROI
设置图像传感器的 AEC/AGC 配置的统计范围,图像传感器将依据该范围内的图像数据特征自动调整曝光时间和增益,实现更好的图像效果。
下面代码将图像左上角 100*100 的区域设置为 ROI 区域,AEC 仅统计该区域:
TY_AEC_ROI_PARAM aec_roi_param;
aec_roi_param.x = 0;
aec_roi_param.y = 0;
aec_roi_param.w = 100;
aec_roi_param.h = 100;
TYSetStruct(hDevice, TY_COMPONENT_RGB_CAM, TY_STRUCT_AEC_ROI, &aec_roi_param, sizeof(TY_AEC_ROI_PARAM));
图像集成时间
TY_INT_CAPTURE_TIME_US
部分相机图像采集时间较长(超过图像传感器的曝光时间),如 -IX 系列及 PS 系列产品,可以通过 API 读取实际的集成时间,单位为微秒。
读取 Capture Time 功能示例:
int32_t capture_time;
TYGetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_CAPTURE_TIME_US, &capture_time);
printf("get capture time %d\n", capture_time);
图像同步
TY_BOOL_CMOS_SYNC = 0x0205 | TY_FEATURE_BOOL,
双目深度计算使用的左、右两幅图像曝光完全同步时,可以获得最好的深度图数据;当左、右两幅红外图像曝光不完全同步,时间相差较小时,也可以输出深度图像数据,数据精度稍差。左右图像完全同步时,图像输出帧率低于不完全同步时图像输出帧率。依据实际使用场景对深度图质量和帧率的需要,可以通过该布尔型属性对相机的工作配置进行修改。深度相机默认采用完全同步的设置。
bool tmp;
ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_CMOS_SYNC, false));
ASSERT_OK(TYGetBool(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_CMOS_SYNC, &tmp));
if (tmp != false) {
LOGD("==set TY_BOOL_CMOS_SYNC failed !");
}
数据流同步
TY_ENUM_STREAM_ASYNC
深度相机的红外图像、彩色图像和深度图像数据输出时,支持立即输出已获取到的图像数据。如 -IX 系列及 PS 系列产品,红外和彩色图像获取时间较早,深度数据计算时间较长,可以先输出红外和彩色数据,供上位机进行必要的计算。
typedef enum TY_STREAM_ASYNC_MODE_LIST
{
TY_STREAM_ASYNC_OFF = 0,
TY_STREAM_ASYNC_DEPTH = 1,
TY_STREAM_ASYNC_RGB = 2,
TY_STREAM_ASYNC_DEPTH_RGB = 3,
TY_STREAM_ASYNC_ALL = 0xff,
}TY_STREAM_ASYNC_MODE_LIST;
ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_DEVICE, TY_ENUM_STREAM_ASYNC, TY_STREAM_ASYNC_ALL));
图像格式设置与处理
图像的格式和分辨率是 ENUM 类型。SDK 头文件中枚举了相机支持的各种图像格式和分辨率。不同相机支持的具体格式不同,可以通过 API 进行查询和设置。
TY_ENUM_IMAGE_MODE = 0x0109 | TY_FEATURE_ENUM,
示例:获取彩色图像支持的图像格式。
uint32_t n; ASSERT_OK(TYGetEnumEntryCount(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, &n)); LOGD("=== %14s: entry count %d", "", n); if (n > 0) { std::vector<TY_ENUM_ENTRY> entry(n); ASSERT_OK(TYGetEnumEntryInfo(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, &entry[0], n, &n)); for (uint32_t i = 0; i < n; i++) { LOGD("=== %14s: value(%d), desc(%s)", "", entry[i].value, entry[i].description); } }
示例:设置彩色图格式为 BAYER8GB,分辨率为 1280*960。
LOGD("=== Configure feature, set resolution to 1280x960."); ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, TY_PIXEL_FORMAT_BAYER8GB|TY_RESOLUTION_MODE_1280x960));
或者使用图像格式的组合定义 TY_IMAGE_MODE_pixel_resolution 来配置彩色图像传感器的输出图像格式:
LOGD("=== Configure feature, set resolution to 1280x960."); ASSERT_OK(TYSetEnum(hDevice, TY_COMPONENT_RGB_CAM, TY_ENUM_IMAGE_MODE, TY_IMAGE_MODE_BAYER8GB_1280x960));
示例:设置深度图为 640x480 格式。
std::vector<TY_ENUM_ENTRY> image_mode_list; uint32_t n = 0; ASSERT_OK(TYGetEnumEntryCount(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, &n)); LOGD("=== %14s: entry count %d", "", n); if (n == 0){ return TY_STATUS_ERROR; } std::vector<TY_ENUM_ENTRY> entry(n); ASSERT_OK(TYGetEnumEntryInfo(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, &entry[0], n, &n)); for (int idx = 0; idx < image_mode_list.size(); idx++) { TY_ENUM_ENTRY &entry = image_mode_list[idx]; //try to select a VGA resolution if (TYImageWidth(entry.value) == 640 || TYImageHeight(entry.value) == 640) { LOGD("Select Depth Image Mode: %s", entry.description); int err = TYSetEnum(hDevice, TY_COMPONENT_DEPTH_CAM, TY_ENUM_IMAGE_MODE, entry.value); ASSERT(err == TY_STATUS_OK || err == TY_STATUS_NOT_PERMITTED); break; } }
TY_FLOAT_SCALE_UNIT = 0x010a | TY_FEATURE_FLOAT,
深度测量值的计算系数。该值默认为 1.0,深度图中每个 Pixel 的数据值是实际测得的距离(单位是毫米);当该值不为 1.0 时,深度图中每个 Pixel 的数据值与该系数的乘积可得到实际测得的距离(单位是毫米)。
float value; ASSERT_OK(TYGetFloat(hDevice, TY_COMPONENT_DEPTH_CAM, TY_FLOAT_SCALE_UNIT, &value));
TY_BOOL_UNDISTORTION = 0x0510 | TY_FEATURE_BOOL, ///< Output undistorted image
畸变矫正开关。默认为 false,即红外图像传感器组件默认输出未做畸变矫正的图像数据。
bool hasUndistortSwitch; ASSERT_OK( TYHasFeature(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_BOOL_UNDISTORTION, &hasUndistortSwitch) ); if (hasUndistortSwitch) { ASSERT_OK( TYSetBool(hDevice, TY_COMPONENT_IR_CAM_LEFT, TY_BOOL_UNDISTORTION, true) ); }
TY_BOOL_BRIGHTNESS_HISTOGRAM = 0x0511 | TY_FEATURE_BOOL,
红外亮度直方图组件使能开关。默认为 false,即不打开红外亮度直方图组件。使能红外亮度直方图组件(TY_COMPONENT_BRIGHT_HISTO),设备会统计并输出左、右红外图像的亮度直方图。
示例,详情请参考 SDK 示例程序 SimpleView_FetchHisto:
int32_t allComps, componentIDs = 0; ASSERT_OK( TYGetComponentIDs(hDevice, &allComps) ); if(allComps & TY_COMPONENT_BRIGHT_HISTO) { LOGD("=== Has bright histo component"); componentIDs |= TY_COMPONENT_BRIGHT_HISTO; } LOGD("=== Configure components, open ir cam"); componentIDs |= TY_COMPONENT_IR_CAM_RIGHT| TY_COMPONENT_IR_CAM_LEFT; ASSERT_OK( TYEnableComponents(hDevice, componentIDs) );
TY_BOOL_DEPTH_POSTPROC = 0x0512 | TY_FEATURE_BOOL,
深度图像后处理开关。部分深度相机支持深度图的平滑滤波功能。
激光器设置
TY_BOOL_LASER_AUTO_CTRL = 0x0501 | TY_FEATURE_BOOL,
激光器自动调整功能开关,布尔型属性,默认为true,即深度相机依据深度计算需要,自动开关红外激光器。具体规则如下:
TY_BOOL_LASER_AUTO_CTRL= true
有深度图输出,激光器便开启,激光亮度通过TY_INT_LASER_POWER设置;
无深度图输出,激光器便关闭。
TY_BOOL_LASER_AUTO_CTRL= false
有任何图像输出,激光器都开启,激光亮度通过TY_INT_LASER_POWER设置。
TY_INT_LASER_POWER = 0x0500 | TY_FEATURE_INT,
激光强度设置。整型属性,设置范围 0~100,默认为 100。通过该属性可设置激光强度,从而调节红外图像传感器成像的亮度。 该属性设置为 0 时,激光器关闭。
示例:关闭激光发射器自动调整功能并将激光强度设置为 90。
ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_LASER, TY_BOOL_LASER_AUTO_CTRL, false)); ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_LASER, TY_INT_LASER_POWER, 90));
泛光设置
TY_BOOL_FLASHLIGHT = 0x0213 | TY_FEATURE_BOOL,
泛光功能开关,布尔型属性,默认为 false。通过该属性可开启泛光功能,利用红外泛光进行相机标定。目前只有 PS801 系列支持泛光功能。具体规则如下:
TY_BOOL_FLASHLIGHT= true
有深度图输出,泛光灯便关闭;
无深度图输出,泛光灯便开启,泛光亮度通过 TY_INT_FLASHLIGHT_INTENSITY 设置。
TY_BOOL_FLASHLIGHT= false
泛光灯关闭。
TY_INT_FLASHLIGHT_INTENSITY = 0x0214 | TY_FEATURE_INT,
泛光强度设置。整型属性,设置范围 0~63,默认为 19。开启泛光功能后,依据实际标定场景,通过该属性设置泛光强度。
备注
泛光灯自带过热保护功能,当温度过高时,泛光灯自动熄灭。
示例:开启泛光功能并将泛光强度设置为 63。
ASSERT_OK(TYSetBool(hDevice, TY_COMPONENT_DEVICE, TY_BOOL_FLASHLIGHT, true));
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEVICE, TY_INT_FLASHLIGHT_INTENSITY, 63));
ToF 相机属性
图像质量设置
TY_ENUM_DEPTH_QUALITY = 0x0900 | TY_FEATURE_ENUM,
设置 ToF 深度相机输出的深度图质量。枚举型属性,定义如下:
typedef enum TY_DEPTH_QUALITY_LIST
{
TY_DEPTH_QUALITY_BASIC = 1,
TY_DEPTH_QUALITY_MEDIUM = 2,
TY_DEPTH_QUALITY_HIGH = 4,
}TY_DEPTH_QUALITY_LIST;
深度图质量设置为 BASIC 时,深度值抖动幅度大,输出帧率高。
深度图质量设置为 MEDIUM 时,深度值抖动幅度中等,输出帧率中等。
深度图质量设置为 HIGH 时,深度值抖动幅度小,输出帧率低。
飞点滤波设置
TY_INT_FILTER_THRESHOLD = 0x0901 | TY_FEATURE_INT, ///< the threshold of the noise filter, 0 for disabled
ToF 深度相机飞点滤波阈值。整型属性,范围 [0,100]。默认值为 0,即不加滤波。滤波阈值设置越小,过滤的飞点越多。
备注
滤波阈值设置过小,可能会把大量有效深度信息过滤掉。
示例:将 ToF 深度相机飞点滤波阈值设置为 43。
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_FILTER_THRESHOLD, 43));
调制频道设置
TY_INT_TOF_CHANNEL = 0x0902 | TY_FEATURE_INT, ///< the frequency channel of tof
ToF 深度相机调制频道。整型属性。不同调制频道的调制频率不同,互不干扰。如需在同一场景运行多台 ToF 深度相机,首先需确保同系列相机的调制频道不同。
示例:将 ToF 深度相机调制频道设置为 2。
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_TOF_CHANNEL, 2));
激光调制光强设置
TY_INT_TOF_MODULATION_THRESHOLD = 0x0903 | TY_FEATURE_INT, ///< the threshold of the tof modulation
ToF 深度相机接收激光调制光强的阈值,整型属性。小于此阈值的像素点不参与计算深度,即像素点的深度值赋值为 0。
示例:将 ToF 深度相机接收激光调制光强的阈值设置为 300。
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_TOF_MODULATION_THRESHOLD, 300));
抖动过滤设置
TY_INT_TOF_JITTER_THRESHOLD = 0x0307 | TY_FEATURE_INT, ///< tof jitter threshold for depth
ToF 深度相机抖动过滤阈值。整型属性。阈值设置值越大,深度图边缘抖动的深度数据过滤得越少。
示例:将 ToF 深度相机抖动过滤阈值设置为 5。
ASSERT_OK(TYSetInt(hDevice, TY_COMPONENT_DEPTH_CAM, TY_INT_TOF_JITTER_THRESHOLD, 5));
坐标变换
点云数据结构:
typedef struct TY_VECT_3F
{
float x;
float y;
float z;
}TY_VECT_3F;
深度图上点的数据结构:
typedef struct TY_PIXEL_DESC
{
int16_t x; // x coordinate in pixels
int16_t y; // y coordinate in pixels
uint16_t depth; // depth value
uint16_t rsvd;
}TY_PIXEL_DESC;
TYInvertExtrinsic 逆阵转换,输入 4x4 外参矩阵,输出其逆矩阵。
TY_CAPI TYInvertExtrinsic (const TY_CAMERA_EXTRINSIC* orgExtrinsic,
TY_CAMERA_EXTRINSIC* invExtrinsic);
TYMapDepthToPoint3d 指定深度图上点转换为点云数据,输入深度相机标定数据、深度图宽高和深度数据点、点数量,输出点云数据。
TY_CAPI TYMapDepthToPoint3d (const TY_CAMERA_CALIB_INFO* src_calib,
uint32_t depthW, uint32_t depthH,
const TY_PIXEL_DESC* depthPixels, uint32_t count,
TY_VECT_3F* point3d);
TYMapPoint3dToDepth 转换点云数据为深度图数据,输入深度相机标定数据,点云数据、点数和目标深度图的宽高,输出深度图上点数据。 TYMapDepthToPoint3d 的逆操作。
TY_CAPI TYMapPoint3dToDepth (const TY_CAMERA_CALIB_INFO* dst_calib,
const TY_VECT_3F* point3d, uint32_t count,
uint32_t depthW, uint32_t depthH,
TY_PIXEL_DESC* depth);
TYMapDepthImageToPoint3d 转换深度数据图为点云,输入深度相机的标定数据,深度图宽、高、和深度图,输出点云。数值为 0 的无效深度点映射为 (NAN, NAN, NAN)。
TY_CAPI TYMapDepthImageToPoint3d (const TY_CAMERA_CALIB_INFO* src_calib,
int32_t imageW, int32_t imageH,
const uint16_t* depth,
TY_VECT_3F* point3d,
float f_scale_unit = 1.0f);
示例:获取点云数据,详请请参考 SDK 示例程序 SimpleView_Point3D。
struct CallbackData {
int index;
TY_DEV_HANDLE hDevice;
TY_ISP_HANDLE isp_handle;
TY_CAMERA_CALIB_INFO depth_calib;
TY_CAMERA_CALIB_INFO color_calib;
};
static void handleFrame(TY_FRAME_DATA* frame, void* userdata) {
//we only using Opencv Mat as data container.
//you can allocate memory by yourself.
CallbackData* pData = (CallbackData*) userdata;
LOGD("=== Get frame %d", ++pData->index);
cv::Mat depth, color;
parseFrame(*frame, &depth, NULL, NULL, &color, isp_handle);
if(!depth.empty()){
std::vector<TY_VECT_3F> p3d;
p3d.resize(depth.size().area());
ASSERT_OK(TYMapDepthImageToPoint3d(&pData->depth_calib, depth.cols, depth.rows
, (uint16_t*)depth.data, &p3d[0]));
}
TYMapPoint3dToDepthImage 转换点云为深度图,输入深度相机的标定数据,点云和点数、深度图宽、高,输出转化后的深度图。无效点云 (NAN, NAN, NAN) 映射为无效深度0。
TY_CAPI TYMapPoint3dToDepthImage (const TY_CAMERA_CALIB_INFO* dst_calib,
const TY_VECT_3F* point3d, uint32_t count,
uint32_t depthW, uint32_t depthH, uint16_t* depth);
TYMapPoint3dToPoint3d 点云坐标转换。输入外参矩阵、点云数据和点数,输出转换后的点云数据。
TY_CAPI TYMapPoint3dToPoint3d (const TY_CAMERA_EXTRINSIC* extrinsic,
const TY_VECT_3F* point3d, int32_t count,
TY_VECT_3F* point3dTo);
TYMapDepthToColorCoordinate 映射深度数据点到彩色图像坐标。输入深度图标定数据、深度图宽和高、深度数据点、深度图点数、彩色图标定数据、彩色图宽、高,输出映射后的深度点。
static inline TY_STATUS TYMapDepthToColorCoordinate(
const TY_CAMERA_CALIB_INFO* depth_calib,
uint32_t depthW, uint32_t depthH,
const TY_PIXEL_DESC* depth, uint32_t count,
const TY_CAMERA_CALIB_INFO* color_calib,
uint32_t mappedW, uint32_t mappedH,
TY_PIXEL_DESC* mappedDepth,
float f_scale_unit = 1.0f);
TYCreateDepthToColorCoordinateLookupTable 创建深度图到彩色图的坐标查找表。输入深度图标定数据、深度图宽和高、深度图、彩色图标定数据、映射后的深度图宽和高,输出映射后的深度点数据表。
static inline TY_STATUS TYCreateDepthToColorCoordinateLookupTable(
const TY_CAMERA_CALIB_INFO* depth_calib,
uint32_t depthW, uint32_t depthH, const uint16_t* depth,
const TY_CAMERA_CALIB_INFO* color_calib,
uint32_t mappedW, uint32_t mappedH,
TY_PIXEL_DESC* lut,
float f_scale_unit = 1.0f);
TYMapDepthImageToColorCoordinate 映射深度图到彩色图坐标。输入深度图标定数据、深度图宽和高,深度图、彩色图标定数据、彩色图宽和高,输出映射后的深度图。
static inline TY_STATUS TYMapDepthImageToColorCoordinate(
const TY_CAMERA_CALIB_INFO* depth_calib,
uint32_t depthW, uint32_t depthH, const uint16_t* depth,
const TY_CAMERA_CALIB_INFO* color_calib,
uint32_t mappedW, uint32_t mappedH, uint16_t* mappedDepth,
float f_scale_unit = 1.0f);
TYMapRGBImageToDepthCoordinate 映射彩色图到深度图坐标。输入深度图标定数据、深度图宽和高、深度图、彩色图标定数据、彩色图宽和高、彩色图,输出映射后的彩色图像数据。
static inline TY_STATUS TYMapRGBImageToDepthCoordinate(
const TY_CAMERA_CALIB_INFO* depth_calib,
uint32_t depthW, uint32_t depthH, const uint16_t* depth,
const TY_CAMERA_CALIB_INFO* color_calib,
uint32_t rgbW, uint32_t rgbH, const uint8_t* inRgb,
uint8_t* mappedRgb,
float f_scale_unit = 1.0f);
示例:深度图和彩色图之间的坐标映射,详请请参考 SDK 示例程序 SimpleView_Registration。
static void doRegister(const TY_CAMERA_CALIB_INFO& depth_calib
, const TY_CAMERA_CALIB_INFO& color_calib
, const cv::Mat& depth
, const float f_scale_unit
, const cv::Mat& color
, bool needUndistort
, cv::Mat& undistort_color
, cv::Mat& out
, bool map_depth_to_color
)
{
// do undistortion
if (needUndistort) {
TY_IMAGE_DATA src;
src.width = color.cols;
src.height = color.rows;
src.size = color.size().area() * 3;
src.pixelFormat = TY_PIXEL_FORMAT_RGB;
src.buffer = color.data;
undistort_color = cv::Mat(color.size(), CV_8UC3);
TY_IMAGE_DATA dst;
dst.width = color.cols;
dst.height = color.rows;
dst.size = undistort_color.size().area() * 3;
dst.buffer = undistort_color.data;
dst.pixelFormat = TY_PIXEL_FORMAT_RGB;
ASSERT_OK(TYUndistortImage(&color_calib, &src, NULL, &dst));
}
else {
undistort_color = color;
}
// do register
if (map_depth_to_color) {
out = cv::Mat::zeros(undistort_color.size(), CV_16U);
ASSERT_OK(
TYMapDepthImageToColorCoordinate(
&depth_calib,
depth.cols, depth.rows, depth.ptr<uint16_t>(),
&color_calib,
out.cols, out.rows, out.ptr<uint16_t>(), f_scale_unit
)
);
cv::Mat temp;
//you may want to use median filter to fill holes in projected depth image
//or do something else here
cv::medianBlur(out, temp, 5);
out = temp;
}
else {
out = cv::Mat::zeros(depth.size(), CV_8UC3);
ASSERT_OK(
TYMapRGBImageToDepthCoordinate(
&depth_calib,
depth.cols, depth.rows, depth.ptr<uint16_t>(),
&color_calib,
undistort_color.cols, undistort_color.rows, undistort_color.ptr<uint8_t>(),
out.ptr<uint8_t>(), f_scale_unit
)
);
}
}
TYMapMono8ImageToDepthCoordinate 映射 MONO8 彩色图到深度图坐标。输入深度图标定数据、深度图宽和高、深度图、MONO8 彩色图标定数据、MONO8 彩色图宽和高、MONO8 彩色图,输出映射后的 MONO8 彩色图像数据。
static inline TY_STATUS TYMapMono8ImageToDepthCoordinate(
const TY_CAMERA_CALIB_INFO* depth_calib,
uint32_t depthW, uint32_t depthH, const uint16_t* depth,
const TY_CAMERA_CALIB_INFO* color_calib,
uint32_t monoW, uint32_t monoH, const uint8_t* inMono,
uint8_t* mappedMono,
float f_scale_unit = 1.0f);
图像处理
TYUndistortImage 畸变校正,可对传感器组件输出的图像做畸变处理,支持的数据格式包括:TY_PIXEL_FORMAT_MONO、TY_PIXEL_FORMAT_RGB、TY_PIXEL_FORMAT_BGR。输入参数为传感器标定数据、未矫正原始图像和期望的图像内参(输入为 NULL 则使用传感器原有内参),输出校正后的图像数据。
TY_CAPI TYUndistortImage (const TY_CAMERA_CALIB_INFO *srcCalibInfo
, const TY_IMAGE_DATA *srcImage
, const TY_CAMERA_INTRINSIC *cameraNewIntrinsic
, TY_IMAGE_DATA *dstImage
);
TYDepthSpeckleFilter 深度图中无效点填充和离散点降噪处理,输入深度图和滤波参数,输出处理后的深度图。
struct DepthSpeckleFilterParameters {
int max_speckle_size; // blob size smaller than this will be removed
int max_speckle_diff; // Maximum difference between neighbor disparity pixels
};
#define DepthSpeckleFilterParameters_Initializer {150, 64}
TY_CAPI TYDepthSpeckleFilter (TY_IMAGE_DATA* depthImage
, const DepthSpeckleFilterParameters* param
);
TYDepthEnhenceFilter 图像滤波,输入深度图,图像数量,参照图和滤波系数,输出滤波后的深度数据。
TY_CAPI TYDepthEnhenceFilter (const TY_IMAGE_DATA* depthImages
, int imageNum
, TY_IMAGE_DATA *guide
, TY_IMAGE_DATA *output
, const DepthEnhenceParameters* param
);
struct DepthEnhenceParameters{
float sigma_s; // filter param on space
float sigma_r; // filter param on range
int outlier_win_sz; // outlier filter windows size
float outlier_rate;
};
#define DepthEnhenceParameters_Initializer {10, 20, 10, 0.1f}
sigma_s 是空间滤波系数,sigma_r 是深度滤波系数,outlier_win_sz 是以像素为单位的滤波窗口,outlier_rate 噪音过滤系数。
API 参考
The camport3 libraries provide support for configuring PERCIPIO depth camera, data receiving and post-processing functionality.
API for Percipio depth camera
TYApi.h
includes camera control and data receiving interface, which supports configuration for image resolution, frame rate, exposure
time, gain, working mode,etc.
Defines
-
_STDBOOL_H
-
__bool_true_false_are_defined
- bool
-
true
-
false
-
TY_DLLIMPORT
-
TY_DLLEXPORT
-
TY_STDC
-
TY_CDEC
-
TY_EXPORT
-
TY_EXTC
-
TY_DECLARE_IMAGE_MODE0(pix, res)
-
TY_DECLARE_IMAGE_MODE1(pix)
-
TY_CAPI
Typedefs
-
typedef enum TY_STATUS_LIST TY_STATUS_LIST
API call return status.
-
typedef int32_t TY_STATUS
-
typedef enum TY_FW_ERRORCODE_LIST TY_FW_ERRORCODE_LIST
-
typedef uint32_t TY_FW_ERRORCODE
-
typedef enum TY_EVENT_LIST TY_ENENT_LIST
-
typedef int32_t TY_EVENT
-
typedef void *TY_INTERFACE_HANDLE
Interface handle.
-
typedef void *TY_DEV_HANDLE
Device Handle.
-
typedef enum TY_DEVICE_COMPONENT_LIST TY_DEVICE_COMPONENT_LIST
@breif Device Component list A device contains several component.
Each component can be controlled by its own features, such as image width, exposure time, etc..
参见
To Know how to get feature information please refer to sample code DumpAllFeatures
-
typedef uint32_t TY_COMPONENT_ID
component unique id
-
typedef enum TY_FEATURE_TYPE_LIST TY_FEATURE_TYPE_LIST
Feature Format Type definitions.
-
typedef uint32_t TY_FEATURE_TYPE
-
typedef enum TY_FEATURE_ID_LIST TY_FEATURE_ID_LIST
feature for component definitions
-
typedef uint32_t TY_FEATURE_ID
feature unique id
-
typedef enum TY_DEPTH_QUALITY_LIST TY_DEPTH_QUALITY_LIST
-
typedef uint32_t TY_DEPTH_QUALITY
-
typedef enum TY_TRIGGER_POL_LIST TY_TRIGGER_POL_LIST
set external trigger signal edge
-
typedef uint32_t TY_TRIGGER_POL
-
typedef enum TY_INTERFACE_TYPE_LIST TY_INTERFACE_TYPE_LIST
Interface type definition.
-
typedef uint32_t TY_INTERFACE_TYPE
-
typedef enum TY_ACCESS_MODE_LIST TY_ACCESS_MODE_LIST
Indicate a feature is readable or writable.
-
typedef uint8_t TY_ACCESS_MODE
-
typedef enum TY_STREAM_ASYNC_MODE_LIST TY_STREAM_ASYNC_MODE_LIST
stream async mode
-
typedef uint8_t TY_STREAM_ASYNC_MODE
-
typedef enum TY_PIXEL_BITS_LIST TY_PIXEL_BITS_LIST
Pixel size type definitions to define the pixel size in bits.
-
typedef uint32_t TY_PIXEL_BITS
-
typedef enum TY_PIXEL_FORMAT_LIST TY_PIXEL_FORMAT_LIST
pixel format definitions
-
typedef uint32_t TY_PIXEL_FORMAT
-
typedef enum TY_RESOLUTION_MODE_LIST TY_RESOLUTION_MODE_LIST
predefined resolution list
-
typedef int32_t TY_RESOLUTION_MODE
-
typedef enum TY_IMAGE_MODE_LIST TY_IMAGE_MODE_LIST
Predefined Image Mode List image mode controls image resolution & format predefined image modes named like TY_IMAGE_MODE_MONO_160x120,TY_IMAGE_MODE_RGB_1280x960.
-
typedef uint32_t TY_IMAGE_MODE
-
typedef enum TY_TRIGGER_MODE_LIST TY_TRIGGER_MODE_LIST
参见
refer to sample SimpleView_TriggerMode for detail usage
-
typedef int16_t TY_TRIGGER_MODE
-
typedef enum TY_TIME_SYNC_TYPE_LIST TY_TIME_SYNC_TYPE_LIST
type of time sync
-
typedef uint32_t TY_TIME_SYNC_TYPE
-
typedef uint32_t TY_E_VOLT_T
-
typedef uint32_t TY_E_DO_MODE
-
typedef uint32_t TY_E_DI_MODE
-
typedef uint32_t TY_E_DI_INT_ACTION
-
typedef struct TY_VERSION_INFO TY_VERSION_INFO
-
typedef struct TY_DEVICE_NET_INFO TY_DEVICE_NET_INFO
device network information
-
typedef struct TY_DEVICE_USB_INFO TY_DEVICE_USB_INFO
-
typedef struct TY_INTERFACE_INFO TY_INTERFACE_INFO
-
typedef struct TY_DEVICE_BASE_INFO TY_DEVICE_BASE_INFO
-
typedef struct TY_FEATURE_INFO TY_FEATURE_INFO
-
typedef struct TY_INT_RANGE TY_INT_RANGE
-
typedef struct TY_FLOAT_RANGE TY_FLOAT_RANGE
float range data structure
-
typedef struct TY_BYTEARRAY_ATTR TY_BYTEARRAY_ATTR
byte array data structure
-
typedef struct TY_ENUM_ENTRY TY_ENUM_ENTRY
enum feature entry information
-
typedef struct TY_VECT_3F TY_VECT_3F
-
typedef struct TY_CAMERA_INTRINSIC TY_CAMERA_INTRINSIC
a 3x3 matrix
.
.
.
fx
0
cx
0
fy
cy
0
0
1
参见
TYGetStruct Usage:
TY_CAMERA_INTRINSIC intrinsic; TYGetStruct(hDevice, some_compoent, TY_STRUCT_CAM_INTRINSIC, &intrinsic, sizeof(intrinsic));
-
typedef struct TY_CAMERA_EXTRINSIC TY_CAMERA_EXTRINSIC
a 4x4 matrix
.
.
.
.
r11
r12
r13
t1
r21
r22
r23
t2
r31
r32
r33
t3
0
0
0
1
参见
TYGetStruct Usage:
TY_CAMERA_EXTRINSIC extrinsic; TYGetStruct(hDevice, some_compoent, TY_STRUCT_EXTRINSIC, &extrinsic, sizeof(extrinsic));
-
typedef struct TY_CAMERA_DISTORTION TY_CAMERA_DISTORTION
camera distortion parameters
参见
TYGetStruct Usage:
TY_CAMERA_DISTORTION distortion; TYGetStruct(hDevice, some_compoent, TY_STRUCT_CAM_DISTORTION, &distortion, sizeof(distortion));
-
typedef struct TY_CAMERA_CALIB_INFO TY_CAMERA_CALIB_INFO
camera ‘s cailbration data
参见
-
typedef struct TY_TRIGGER_PARAM TY_TRIGGER_PARAM
-
typedef struct TY_TRIGGER_PARAM_EX TY_TRIGGER_PARAM_EX
-
typedef struct TY_TRIGGER_TIMER_LIST TY_TRIGGER_TIMER_LIST
-
typedef struct TY_TRIGGER_TIMER_PERIOD TY_TRIGGER_TIMER_PERIOD
-
typedef struct TY_AEC_ROI_PARAM TY_AEC_ROI_PARAM
-
typedef struct TY_CAMERA_STATISTICS TY_CAMERA_STATISTICS
-
typedef struct TY_IMU_DATA TY_IMU_DATA
-
typedef struct TY_ACC_BIAS TY_ACC_BIAS
a 3x3 matrix
.
.
.
BIASx
BIASy
BIASz
-
typedef struct TY_ACC_MISALIGNMENT TY_ACC_MISALIGNMENT
a 3x3 matrix
|.
|.|.|
.
.
.
1
-GAMAyz
GAMAzy
GAMAxz
1
-GAMAzx
-GAMAxy
GAMAyx
1
-
typedef struct TY_ACC_SCALE TY_ACC_SCALE
a 3x3 matrix
.
.
.
SCALEx
0
0
0
SCALEy
0
0
0
SCALEz
-
typedef struct TY_GYRO_BIAS TY_GYRO_BIAS
a 3x3 matrix
.
.
.
BIASx
BIASy
BIASz
-
typedef struct TY_GYRO_MISALIGNMENT TY_GYRO_MISALIGNMENT
a 3x3 matrix
.
.
.
1
-ALPHAyz
ALPHAzy
0
1
-ALPHAzx
0
0
1
-
typedef struct TY_GYRO_SCALE TY_GYRO_SCALE
a 3x3 matrix
.
.
.
SCALEx
0
0
0
SCALEy
0
0
0
SCALEz
-
typedef struct TY_CAMERA_TO_IMU TY_CAMERA_TO_IMU
a 4x4 matrix
.
.
.
.
r11
r12
r13
t1
r21
r22
r23
t2
r31
r32
r33
t3
0
0
0
1
-
typedef struct TY_TOF_FREQ TY_TOF_FREQ
-
typedef enum TY_IMU_FPS_LIST TY_IMU_FPS_LIST
-
typedef struct TY_IMAGE_DATA TY_IMAGE_DATA
-
typedef struct TY_FRAME_DATA TY_FRAME_DATA
-
typedef struct TY_EVENT_INFO TY_EVENT_INFO
-
typedef struct TY_DO_WORKMODE TY_DO_WORKMODE
-
typedef struct TY_DI_WORKMODE TY_DI_WORKMODE
-
typedef void (*TY_EVENT_CALLBACK)(TY_EVENT_INFO*, void *userdata)
-
typedef void (*TY_IMU_CALLBACK)(TY_IMU_DATA*, void *userdata)
Enums
-
enum TY_STATUS_LIST
API call return status.
Values:
-
enumerator TY_STATUS_OK
-
enumerator TY_STATUS_ERROR
-
enumerator TY_STATUS_NOT_INITED
-
enumerator TY_STATUS_NOT_IMPLEMENTED
-
enumerator TY_STATUS_NOT_PERMITTED
-
enumerator TY_STATUS_DEVICE_ERROR
-
enumerator TY_STATUS_INVALID_PARAMETER
-
enumerator TY_STATUS_INVALID_HANDLE
-
enumerator TY_STATUS_INVALID_COMPONENT
-
enumerator TY_STATUS_INVALID_FEATURE
-
enumerator TY_STATUS_WRONG_TYPE
-
enumerator TY_STATUS_WRONG_SIZE
-
enumerator TY_STATUS_OUT_OF_MEMORY
-
enumerator TY_STATUS_OUT_OF_RANGE
-
enumerator TY_STATUS_TIMEOUT
-
enumerator TY_STATUS_WRONG_MODE
-
enumerator TY_STATUS_BUSY
-
enumerator TY_STATUS_IDLE
-
enumerator TY_STATUS_NO_DATA
-
enumerator TY_STATUS_NO_BUFFER
-
enumerator TY_STATUS_NULL_POINTER
-
enumerator TY_STATUS_READONLY_FEATURE
-
enumerator TY_STATUS_INVALID_DESCRIPTOR
-
enumerator TY_STATUS_INVALID_INTERFACE
-
enumerator TY_STATUS_FIRMWARE_ERROR
-
enumerator TY_STATUS_DEV_EPERM
-
enumerator TY_STATUS_DEV_EIO
-
enumerator TY_STATUS_DEV_ENOMEM
-
enumerator TY_STATUS_DEV_EBUSY
-
enumerator TY_STATUS_DEV_EINVAL
-
enumerator TY_STATUS_OK
-
enum TY_FW_ERRORCODE_LIST
Values:
-
enumerator TY_FW_ERRORCODE_CAM0_NOT_DETECTED
-
enumerator TY_FW_ERRORCODE_CAM1_NOT_DETECTED
-
enumerator TY_FW_ERRORCODE_CAM2_NOT_DETECTED
-
enumerator TY_FW_ERRORCODE_POE_NOT_INIT
-
enumerator TY_FW_ERRORCODE_RECMAP_NOT_CORRECT
-
enumerator TY_FW_ERRORCODE_LOOKUPTABLE_NOT_CORRECT
-
enumerator TY_FW_ERRORCODE_DRV8899_NOT_INIT
-
enumerator TY_FW_ERRORCODE_CONFIG_NOT_FOUND
-
enumerator TY_FW_ERRORCODE_CONFIG_NOT_CORRECT
-
enumerator TY_FW_ERRORCODE_XML_NOT_FOUND
-
enumerator TY_FW_ERRORCODE_XML_NOT_CORRECT
-
enumerator TY_FW_ERRORCODE_XML_OVERRIDE_FAILED
-
enumerator TY_FW_ERRORCODE_CAM_INIT_FAILED
-
enumerator TY_FW_ERRORCODE_LASER_INIT_FAILED
-
enumerator TY_FW_ERRORCODE_CAM0_NOT_DETECTED
-
enum TY_EVENT_LIST
Values:
-
enumerator TY_EVENT_DEVICE_OFFLINE
-
enumerator TY_EVENT_LICENSE_ERROR
-
enumerator TY_EVENT_FW_INIT_ERROR
-
enumerator TY_EVENT_DEVICE_OFFLINE
-
enum TY_DEVICE_COMPONENT_LIST
@breif Device Component list A device contains several component.
Each component can be controlled by its own features, such as image width, exposure time, etc..
参见
To Know how to get feature information please refer to sample code DumpAllFeatures
Values:
-
enumerator TY_COMPONENT_DEVICE
Abstract component stands for whole device, always enabled.
-
enumerator TY_COMPONENT_DEPTH_CAM
Depth camera.
-
enumerator TY_COMPONENT_IR_CAM_LEFT
Left IR camera.
-
enumerator TY_COMPONENT_IR_CAM_RIGHT
Right IR camera.
-
enumerator TY_COMPONENT_RGB_CAM_LEFT
Left RGB camera.
-
enumerator TY_COMPONENT_RGB_CAM_RIGHT
Right RGB camera.
-
enumerator TY_COMPONENT_LASER
Laser.
-
enumerator TY_COMPONENT_IMU
Inertial Measurement Unit.
-
enumerator TY_COMPONENT_BRIGHT_HISTO
virtual component for brightness histogram of ir
-
enumerator TY_COMPONENT_STORAGE
virtual component for device storage
-
enumerator TY_COMPONENT_RGB_CAM
Some device has only one RGB camera, map it to left.
-
enumerator TY_COMPONENT_DEVICE
-
enum TY_FEATURE_TYPE_LIST
Feature Format Type definitions.
Values:
-
enumerator TY_FEATURE_INT
-
enumerator TY_FEATURE_FLOAT
-
enumerator TY_FEATURE_ENUM
-
enumerator TY_FEATURE_BOOL
-
enumerator TY_FEATURE_STRING
-
enumerator TY_FEATURE_BYTEARRAY
-
enumerator TY_FEATURE_STRUCT
-
enumerator TY_FEATURE_INT
-
enum TY_FEATURE_ID_LIST
feature for component definitions
Values:
-
enumerator TY_STRUCT_CAM_INTRINSIC
-
enumerator TY_STRUCT_EXTRINSIC_TO_DEPTH
extrinsic between depth cam and current component , see TY_CAMERA_EXTRINSIC
-
enumerator TY_STRUCT_EXTRINSIC_TO_IR_LEFT
extrinsic between left IR and current compoent, see TY_CAMERA_EXTRINSIC
-
enumerator TY_STRUCT_CAM_DISTORTION
-
enumerator TY_STRUCT_CAM_CALIB_DATA
-
enumerator TY_STRUCT_CAM_RECTIFIED_INTRI
the rectified intrinsic. see TY_CAMERA_INTRINSIC
-
enumerator TY_BYTEARRAY_CUSTOM_BLOCK
used for reading/writing custom block
-
enumerator TY_BYTEARRAY_ISP_BLOCK
used for reading/writing fpn block
-
enumerator TY_INT_PERSISTENT_IP
-
enumerator TY_INT_PERSISTENT_SUBMASK
-
enumerator TY_INT_PERSISTENT_GATEWAY
-
enumerator TY_BOOL_GVSP_RESEND
-
enumerator TY_INT_PACKET_DELAY
microseconds
-
enumerator TY_INT_ACCEPTABLE_PERCENT
-
enumerator TY_INT_NTP_SERVER_IP
Ntp server IP.
-
enumerator TY_INT_PACKET_SIZE
-
enumerator TY_INT_LINK_CMD_TIMEOUT
milliseconds
-
enumerator TY_STRUCT_CAM_STATISTICS
statistical information, see TY_CAMERA_STATISTICS
-
enumerator TY_INT_WIDTH_MAX
-
enumerator TY_INT_HEIGHT_MAX
-
enumerator TY_INT_OFFSET_X
-
enumerator TY_INT_OFFSET_Y
-
enumerator TY_INT_WIDTH
Image width.
-
enumerator TY_INT_HEIGHT
Image height.
-
enumerator TY_ENUM_IMAGE_MODE
Resolution-PixelFromat mode, see TY_IMAGE_MODE_LIST.
-
enumerator TY_FLOAT_SCALE_UNIT
scale unit depth image is uint16 pixel format with default millimeter unit ,for some device can output Sub-millimeter accuracy data the acutal depth (mm)= PixelValue * ScaleUnit
-
enumerator TY_ENUM_TRIGGER_POL
Trigger POL, see TY_TRIGGER_POL_LIST.
-
enumerator TY_INT_FRAME_PER_TRIGGER
Number of frames captured per trigger.
-
enumerator TY_STRUCT_TRIGGER_PARAM
param of trigger, see TY_TRIGGER_PARAM
-
enumerator TY_STRUCT_TRIGGER_PARAM_EX
param of trigger, see TY_TRIGGER_PARAM_EX
-
enumerator TY_STRUCT_TRIGGER_TIMER_LIST
param of trigger mode 20, see TY_TRIGGER_TIMER_LIST
-
enumerator TY_STRUCT_TRIGGER_TIMER_PERIOD
param of trigger mode 21, see TY_TRIGGER_TIMER_PERIOD
-
enumerator TY_BOOL_KEEP_ALIVE_ONOFF
Keep Alive switch.
-
enumerator TY_INT_KEEP_ALIVE_TIMEOUT
Keep Alive timeout.
-
enumerator TY_BOOL_CMOS_SYNC
Cmos sync switch.
-
enumerator TY_INT_TRIGGER_DELAY_US
Trigger delay time, in microseconds.
-
enumerator TY_BOOL_TRIGGER_OUT_IO
Trigger out IO.
-
enumerator TY_INT_TRIGGER_DURATION_US
Trigger duration time, in microseconds.
-
enumerator TY_ENUM_STREAM_ASYNC
stream async switch, see TY_STREAM_ASYNC_MODE
-
enumerator TY_INT_CAPTURE_TIME_US
capture time in multi-ir
-
enumerator TY_ENUM_TIME_SYNC_TYPE
see TY_TIME_SYNC_TYPE
-
enumerator TY_BOOL_TIME_SYNC_READY
time sync done status
-
enumerator TY_BOOL_FLASHLIGHT
flashlight on/off control
-
enumerator TY_INT_FLASHLIGHT_INTENSITY
flashlight intensity level [0, 63]
-
enumerator TY_STRUCT_DO0_WORKMODE
DO_0 workmode, see TY_DO_WORKMODE.
-
enumerator TY_STRUCT_DI0_WORKMODE
DI_0 workmode, see TY_DI_WORKMODE.
-
enumerator TY_STRUCT_DO1_WORKMODE
DO_1 workmode, see TY_DO_WORKMODE.
-
enumerator TY_STRUCT_DI1_WORKMODE
DI_1 workmode, see TY_DI_WORKMODE.
-
enumerator TY_STRUCT_DO2_WORKMODE
DO_2 workmode, see TY_DO_WORKMODE.
-
enumerator TY_STRUCT_DI2_WORKMODE
DI_2 workmode, see TY_DI_WORKMODE.
-
enumerator TY_BOOL_AUTO_EXPOSURE
Auto exposure switch.
-
enumerator TY_INT_EXPOSURE_TIME
Exposure time in percentage.
-
enumerator TY_BOOL_AUTO_GAIN
Auto gain switch.
-
enumerator TY_INT_GAIN
Sensor Gain.
-
enumerator TY_BOOL_AUTO_AWB
Auto white balance.
-
enumerator TY_STRUCT_AEC_ROI
region of aec statistics, see TY_AEC_ROI_PARAM
-
enumerator TY_INT_TOF_HDR_RATIO
tof sensor hdr ratio for depth
-
enumerator TY_INT_TOF_JITTER_THRESHOLD
tof jitter threshold for depth
-
enumerator TY_INT_LASER_POWER
Laser power level.
-
enumerator TY_BOOL_LASER_AUTO_CTRL
Laser auto ctrl.
-
enumerator TY_BOOL_UNDISTORTION
Output undistorted image.
-
enumerator TY_BOOL_BRIGHTNESS_HISTOGRAM
Output bright histogram.
-
enumerator TY_BOOL_DEPTH_POSTPROC
Do depth image postproc.
-
enumerator TY_INT_R_GAIN
Gain of R channel.
-
enumerator TY_INT_G_GAIN
Gain of G channel.
-
enumerator TY_INT_B_GAIN
Gain of B channel.
-
enumerator TY_INT_ANALOG_GAIN
Analog gain.
-
enumerator TY_BOOL_HDR
HDR func enable/disable.
-
enumerator TY_BYTEARRAY_HDR_PARAMETER
HDR parameters.
-
enumerator TY_BOOL_IMU_DATA_ONOFF
IMU Data Onoff.
-
enumerator TY_STRUCT_IMU_ACC_BIAS
IMU acc bias matrix, see TY_ACC_BIAS.
-
enumerator TY_STRUCT_IMU_ACC_MISALIGNMENT
IMU acc misalignment matrix, see TY_ACC_MISALIGNMENT.
-
enumerator TY_STRUCT_IMU_ACC_SCALE
IMU acc scale matrix, see TY_ACC_SCALE.
-
enumerator TY_STRUCT_IMU_GYRO_BIAS
IMU gyro bias matrix, see TY_GYRO_BIAS.
-
enumerator TY_STRUCT_IMU_GYRO_MISALIGNMENT
IMU gyro misalignment matrix, see TY_GYRO_MISALIGNMENT.
-
enumerator TY_STRUCT_IMU_GYRO_SCALE
IMU gyro scale matrix, see TY_GYRO_SCALE.
-
enumerator TY_STRUCT_IMU_CAM_TO_IMU
IMU camera to imu matrix, see TY_CAMERA_TO_IMU.
-
enumerator TY_ENUM_IMU_FPS
IMU fps, see TY_IMU_FPS_LIST.
-
enumerator TY_INT_SGBM_IMAGE_NUM
SGBM image channel num.
-
enumerator TY_INT_SGBM_DISPARITY_NUM
SGBM disparity num.
-
enumerator TY_INT_SGBM_DISPARITY_OFFSET
SGBM disparity offset.
-
enumerator TY_INT_SGBM_MATCH_WIN_HEIGHT
SGBM match window height.
-
enumerator TY_INT_SGBM_SEMI_PARAM_P1
SGBM semi global param p1.
-
enumerator TY_INT_SGBM_SEMI_PARAM_P2
SGBM semi global param p2.
-
enumerator TY_INT_SGBM_UNIQUE_FACTOR
SGBM uniqueness factor param.
-
enumerator TY_INT_SGBM_UNIQUE_ABSDIFF
SGBM uniqueness min absolute diff.
-
enumerator TY_INT_SGBM_COST_PARAM
SGBM cost param.
-
enumerator TY_BOOL_SGBM_HFILTER_HALF_WIN
SGBM enable half window size.
-
enumerator TY_INT_SGBM_MATCH_WIN_WIDTH
SGBM match window width.
-
enumerator TY_BOOL_SGBM_MEDFILTER
SGBM enable median filter.
-
enumerator TY_BOOL_SGBM_LRC
SGBM enable left right consist check.
-
enumerator TY_INT_SGBM_LRC_DIFF
SGBM max diff.
-
enumerator TY_INT_SGBM_MEDFILTER_THRESH
SGBM median filter thresh.
-
enumerator TY_INT_SGBM_SEMI_PARAM_P1_SCALE
SGBM semi global param p1 scale.
-
enumerator TY_ENUM_DEPTH_QUALITY
the quality of generated depth, see TY_DEPTH_QUALITY
-
enumerator TY_INT_FILTER_THRESHOLD
the threshold of the noise filter, 0 for disabled
-
enumerator TY_INT_TOF_CHANNEL
the frequency channel of tof
-
enumerator TY_INT_TOF_MODULATION_THRESHOLD
the threshold of the tof modulation
-
enumerator TY_STRUCT_TOF_FREQ
the frequency of tof, see TY_TOF_FREQ
-
enumerator TY_BOOL_TOF_ANTI_INTERFERENCE
cooperation if multi-device used
-
enumerator TY_STRUCT_CAM_INTRINSIC
-
enum TY_DEPTH_QUALITY_LIST
Values:
-
enumerator TY_DEPTH_QUALITY_BASIC
-
enumerator TY_DEPTH_QUALITY_MEDIUM
-
enumerator TY_DEPTH_QUALITY_HIGH
-
enumerator TY_DEPTH_QUALITY_BASIC
-
enum TY_TRIGGER_POL_LIST
set external trigger signal edge
Values:
-
enumerator TY_TRIGGER_POL_FALLINGEDGE
-
enumerator TY_TRIGGER_POL_RISINGEDGE
-
enumerator TY_TRIGGER_POL_FALLINGEDGE
-
enum TY_INTERFACE_TYPE_LIST
Interface type definition.
Values:
-
enumerator TY_INTERFACE_UNKNOWN
-
enumerator TY_INTERFACE_RAW
-
enumerator TY_INTERFACE_USB
-
enumerator TY_INTERFACE_ETHERNET
-
enumerator TY_INTERFACE_IEEE80211
-
enumerator TY_INTERFACE_ALL
-
enumerator TY_INTERFACE_UNKNOWN
-
enum TY_ACCESS_MODE_LIST
Indicate a feature is readable or writable.
Values:
-
enumerator TY_ACCESS_READABLE
-
enumerator TY_ACCESS_WRITABLE
-
enumerator TY_ACCESS_READABLE
-
enum TY_STREAM_ASYNC_MODE_LIST
stream async mode
Values:
-
enumerator TY_STREAM_ASYNC_OFF
-
enumerator TY_STREAM_ASYNC_DEPTH
-
enumerator TY_STREAM_ASYNC_RGB
-
enumerator TY_STREAM_ASYNC_DEPTH_RGB
-
enumerator TY_STREAM_ASYNC_ALL
-
enumerator TY_STREAM_ASYNC_OFF
-
enum TY_PIXEL_BITS_LIST
Pixel size type definitions to define the pixel size in bits.
Values:
-
enumerator TY_PIXEL_8BIT
-
enumerator TY_PIXEL_16BIT
-
enumerator TY_PIXEL_24BIT
-
enumerator TY_PIXEL_32BIT
-
enumerator TY_PIXEL_10BIT
-
enumerator TY_PIXEL_12BIT
-
enumerator TY_PIXEL_14BIT
-
enumerator TY_PIXEL_48BIT
-
enumerator TY_PIXEL_64BIT
-
enumerator TY_PIXEL_8BIT
-
enum TY_PIXEL_FORMAT_LIST
pixel format definitions
Values:
-
enumerator TY_PIXEL_FORMAT_UNDEFINED
-
enumerator TY_PIXEL_FORMAT_MONO
0x10000000
-
enumerator TY_PIXEL_FORMAT_BAYER8GB
0x11000000
-
enumerator TY_PIXEL_FORMAT_BAYER8BG
0x12000000
-
enumerator TY_PIXEL_FORMAT_BAYER8GR
0x13000000
-
enumerator TY_PIXEL_FORMAT_BAYER8RG
0x14000000
-
enumerator TY_PIXEL_FORMAT_BAYER8GRBG
-
enumerator TY_PIXEL_FORMAT_BAYER8RGGB
-
enumerator TY_PIXEL_FORMAT_BAYER8GBRG
-
enumerator TY_PIXEL_FORMAT_BAYER8BGGR
-
enumerator TY_PIXEL_FORMAT_CSI_MONO10
0x50000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER10GRBG
0x51000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER10RGGB
0x52000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER10GBRG
0x53000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER10BGGR
0x54000000
-
enumerator TY_PIXEL_FORMAT_CSI_MONO12
0x60000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER12GRBG
0x61000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER12RGGB
0x62000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER12GBRG
0x63000000
-
enumerator TY_PIXEL_FORMAT_CSI_BAYER12BGGR
0x64000000
-
enumerator TY_PIXEL_FORMAT_DEPTH16
0x20000000
-
enumerator TY_PIXEL_FORMAT_YVYU
0x21000000, yvyu422
-
enumerator TY_PIXEL_FORMAT_YUYV
0x22000000, yuyv422
-
enumerator TY_PIXEL_FORMAT_MONO16
0x23000000,
-
enumerator TY_PIXEL_FORMAT_TOF_IR_MONO16
0xa4000000,
-
enumerator TY_PIXEL_FORMAT_RGB
0x30000000
-
enumerator TY_PIXEL_FORMAT_BGR
0x31000000
-
enumerator TY_PIXEL_FORMAT_JPEG
0x32000000
-
enumerator TY_PIXEL_FORMAT_MJPG
0x33000000
-
enumerator TY_PIXEL_FORMAT_RGB48
0x80000000
-
enumerator TY_PIXEL_FORMAT_BGR48
0x81000000
-
enumerator TY_PIXEL_FORMAT_XYZ48
0x82000000
-
enumerator TY_PIXEL_FORMAT_UNDEFINED
-
enum TY_RESOLUTION_MODE_LIST
predefined resolution list
Values:
-
enumerator TY_RESOLUTION_MODE_160x100
0x000a0078
-
enumerator TY_RESOLUTION_MODE_160x120
0x000a0078
-
enumerator TY_RESOLUTION_MODE_240x320
0x000f0140
-
enumerator TY_RESOLUTION_MODE_320x180
0x001400b4
-
enumerator TY_RESOLUTION_MODE_320x200
0x001400c8
-
enumerator TY_RESOLUTION_MODE_320x240
0x001400f0
-
enumerator TY_RESOLUTION_MODE_480x640
0x001e0280
-
enumerator TY_RESOLUTION_MODE_640x360
0x00280168
-
enumerator TY_RESOLUTION_MODE_640x400
0x00280190
-
enumerator TY_RESOLUTION_MODE_640x480
0x002801e0
-
enumerator TY_RESOLUTION_MODE_960x1280
0x003c0500
-
enumerator TY_RESOLUTION_MODE_1280x720
0x005002d0
-
enumerator TY_RESOLUTION_MODE_1280x800
0x00500320
-
enumerator TY_RESOLUTION_MODE_1280x960
0x005003c0
-
enumerator TY_RESOLUTION_MODE_1920x1080
0x00780438
-
enumerator TY_RESOLUTION_MODE_2560x1920
0x00a00780
-
enumerator TY_RESOLUTION_MODE_2592x1944
0x00a20798
-
enumerator TY_RESOLUTION_MODE_1920x1440
0x007805a0
-
enumerator TY_RESOLUTION_MODE_240x96
0x000f0060
-
enumerator TY_RESOLUTION_MODE_2048x1536
0x00800600
-
enumerator TY_RESOLUTION_MODE_160x100
-
enum TY_IMAGE_MODE_LIST
Predefined Image Mode List image mode controls image resolution & format predefined image modes named like TY_IMAGE_MODE_MONO_160x120,TY_IMAGE_MODE_RGB_1280x960.
Values:
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enumerator TY_DECLARE_IMAGE_MODE1
-
enum TY_TRIGGER_MODE_LIST
参见
refer to sample SimpleView_TriggerMode for detail usage
Values:
-
enumerator TY_TRIGGER_MODE_OFF
not trigger mode, continuous mode
-
enumerator TY_TRIGGER_MODE_SLAVE
slave mode, receive soft/hardware triggers
-
enumerator TY_TRIGGER_MODE_M_SIG
master mode 1, sending one trigger signal once received a soft/hardware trigger
-
enumerator TY_TRIGGER_MODE_M_PER
master mode 2, periodic sending one trigger signals, ‘fps’ param should be set
-
enumerator TY_TRIGGER_MODE_SIG_PASS
-
enumerator TY_TRIGGER_MODE_PER_PASS
-
enumerator TY_TRIGGER_MODE_TIMER_LIST
-
enumerator TY_TRIGGER_MODE_TIMER_PERIOD
-
enumerator TY_TRIGGER_MODE_PER_PASS2
trigger mode 30,Alternate output depth image/ir image
-
enumerator TY_TRIGGER_WORK_MODE31
-
enumerator TY_TRIGGER_MODE_SIG_LASER
-
enumerator TY_TRIGGER_MODE_OFF
-
enum TY_TIME_SYNC_TYPE_LIST
type of time sync
Values:
-
enumerator TY_TIME_SYNC_TYPE_NONE
-
enumerator TY_TIME_SYNC_TYPE_HOST
-
enumerator TY_TIME_SYNC_TYPE_NTP
-
enumerator TY_TIME_SYNC_TYPE_PTP
-
enumerator TY_TIME_SYNC_TYPE_CAN
-
enumerator TY_TIME_SYNC_TYPE_PTP_MASTER
-
enumerator TY_TIME_SYNC_TYPE_NONE
-
enum TY_IMU_FPS_LIST
Values:
-
enumerator TY_IMU_FPS_100HZ
-
enumerator TY_IMU_FPS_200HZ
-
enumerator TY_IMU_FPS_400HZ
-
enumerator TY_IMU_FPS_100HZ
Functions
-
static inline bool TYIsNetworkInterface(int32_t interfaceType)
-
static inline void TYIntToIPv4(uint32_t addr, uint8_t out[4])
-
static inline uint32_t TYIPv4ToInt(uint8_t ip[4])
-
static inline TY_IMAGE_DATA TYInitImageData(size_t size, void *buffer, size_t width, size_t height)
init a TY_IMAGE_DATA struct
-
static inline TY_FEATURE_TYPE TYFeatureType(TY_FEATURE_ID id)
get feature format type from feature id
-
static inline int32_t TYPixelSize(TY_IMAGE_MODE imageMode)
deprecated: get pixel size in byte, Invalid for 10/12/14bit mode
-
static inline int32_t TYBitsPerPixel(TY_IMAGE_MODE imageMode)
get pixel size in bits
-
static inline int32_t TYPixelLineSize(int width, TY_IMAGE_MODE imageMode)
get line size in bytes
-
static inline TY_IMAGE_MODE TYImageMode(TY_PIXEL_FORMAT pix, TY_RESOLUTION_MODE res)
make a image mode from pixel format & resolution mode
-
static inline TY_RESOLUTION_MODE TYResolutionMode2(int width, int height)
get a resoltuion mode from width & height
-
static inline TY_IMAGE_MODE TYImageMode2(TY_PIXEL_FORMAT pix, int width, int height)
create a image mode from pixel format , width & height
-
static inline TY_PIXEL_FORMAT TYPixelFormat(TY_IMAGE_MODE imageMode)
get pixel format from image mode
-
static inline TY_RESOLUTION_MODE TYResolutionMode(TY_IMAGE_MODE imageMode)
get a resoltuion mode from image mode
-
static inline int32_t TYImageWidth(TY_IMAGE_MODE imageMode)
get image width from image mode
-
static inline int32_t TYImageHeight(TY_IMAGE_MODE imageMode)
get image height from image mode
- TY_EXTC const TY_EXPORT char *TY_STDC TYErrorString (TY_STATUS errorID)
Get error information.
- 参数:
errorID – [in] Error id.
- 返回:
Error string.
-
static inline TY_STATUS TYInitLib(void)
Init this library.
We make this function to be static inline, because we do a version check here. Some user may use the mismatched header file and dynamic library, and that’s quite difficult to locate the error.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_ERROR – Has been inited.
-
TY_CAPI TYDeinitLib(void)
Deinit this library.
- 返回值:
TY_STATUS_OK – Succeed.
-
TY_CAPI TYLibVersion(TY_VERSION_INFO *version)
Get current library version.
- 参数:
version – [out] Version infomation to be filled.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NULL_POINTER – buffer is NULL.
-
TY_CAPI TYUpdateInterfaceList()
Update current interfaces.
call before TYGetInterfaceList
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
-
TY_CAPI TYGetInterfaceNumber(uint32_t *pNumIfaces)
Get number of current interfaces.
- 参数:
pNumIfaces – [out] Number of interfaces.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_NULL_POINTER – deviceNumber is NULL.
-
TY_CAPI TYGetInterfaceList(TY_INTERFACE_INFO *pIfaceInfos, uint32_t bufferCount, uint32_t *filledCount)
Get interface info list.
- 参数:
pIfaceInfos – [out] Array of interface infos to be filled.
bufferCount – [in] Array size of interface infos.
filledCount – [out] Number of filled TY_INTERFACE_INFO.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_NULL_POINTER – pIfaceInfos or filledCount is NULL.
-
TY_CAPI TYHasInterface(const char *ifaceID, bool *value)
Check if has interface.
- 参数:
ifaceID – [in] Interface ID string, can be get from TY_INTERFACE_INFO.
value – [out] True if the interface exists.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_NULL_POINTER – ifaceID or outHandle is NULL.
-
TY_CAPI TYOpenInterface(const char *ifaceID, TY_INTERFACE_HANDLE *outHandle)
Open specified interface.
- 参数:
ifaceID – [in] Interface ID string, can be get from TY_INTERFACE_INFO.
outHandle – [out] Handle of opened interface.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_NULL_POINTER – ifaceID or outHandle is NULL.
TY_STATUS_INVALID_INTERFACE – Interface not found.
-
TY_CAPI TYCloseInterface(TY_INTERFACE_HANDLE ifaceHandle)
Close interface.
- 参数:
ifaceHandle – [in] Interface to be closed.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Interface not found.
-
TY_CAPI TYUpdateDeviceList(TY_INTERFACE_HANDLE ifaceHandle)
Update current connected devices.
- 参数:
ifaceHandle – [in] Interface handle.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Invalid interface handle.
-
TY_CAPI TYUpdateAllDeviceList()
Update current connected devices.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
-
TY_CAPI TYGetDeviceNumber(TY_INTERFACE_HANDLE ifaceHandle, uint32_t *deviceNumber)
Get number of current connected devices.
- 参数:
ifaceHandle – [in] Interface handle.
deviceNumber – [out] Number of connected devices.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Invalid interface handle.
TY_STATUS_NULL_POINTER – deviceNumber is NULL.
-
TY_CAPI TYGetDeviceList(TY_INTERFACE_HANDLE ifaceHandle, TY_DEVICE_BASE_INFO *deviceInfos, uint32_t bufferCount, uint32_t *filledDeviceCount)
Get device info list.
- 参数:
ifaceHandle – [in] Interface handle.
deviceInfos – [out] Device info array to be filled.
bufferCount – [in] Array size of deviceInfos.
filledDeviceCount – [out] Number of filled TY_DEVICE_BASE_INFO.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Invalid interface handle.
TY_STATUS_NULL_POINTER – deviceInfos or filledDeviceCount is NULL.
-
TY_CAPI TYHasDevice(TY_INTERFACE_HANDLE ifaceHandle, const char *deviceID, bool *value)
Check whether the interface has the specified device.
- 参数:
ifaceHandle – [in] Interface handle.
deviceID – [in] Device ID string, can be get from TY_DEVICE_BASE_INFO.
value – [out] True if the device exists.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Invalid interface handle.
TY_STATUS_NULL_POINTER – deviceID or value is NULL.
-
TY_CAPI TYOpenDevice(TY_INTERFACE_HANDLE ifaceHandle, const char *deviceID, TY_DEV_HANDLE *outDeviceHandle, TY_FW_ERRORCODE *outFwErrorcode = NULL)
Open device by device ID.
- 参数:
ifaceHandle – [in] Interface handle.
deviceID – [in] Device ID string, can be get from TY_DEVICE_BASE_INFO.
deviceHandle – [out] Handle of opened device. Valid only if TY_STATUS_OK or TY_FW_ERRORCODE returned.
outFwErrorcode – [out] Firmware errorcode. Valid only if TY_FW_ERRORCODE returned.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Invalid interface handle.
TY_STATUS_NULL_POINTER – deviceID or deviceHandle is NULL.
TY_STATUS_INVALID_PARAMETER – Device not found.
TY_STATUS_BUSY – Device has been opened.
TY_STATUS_DEVICE_ERROR – Open device failed.
-
TY_CAPI TYOpenDeviceWithIP(TY_INTERFACE_HANDLE ifaceHandle, const char *IP, TY_DEV_HANDLE *deviceHandle)
Open device by device IP, useful when a device is not listed.
- 参数:
ifaceHandle – [in] Interface handle.
IP – [in] Device IP.
deviceHandle – [out] Handle of opened device.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Invalid interface handle.
TY_STATUS_NULL_POINTER – IP or deviceHandle is NULL.
TY_STATUS_INVALID_PARAMETER – Device not found.
TY_STATUS_BUSY – Device has been opened, may occupied somewhere else.
TY_STATUS_DEVICE_ERROR – Open device failed.
-
TY_CAPI TYGetDeviceInterface(TY_DEV_HANDLE hDevice, TY_INTERFACE_HANDLE *pIface)
Get interface handle by device handle.
- 参数:
hDevice – [in] Device handle.
pIface – [out] Interface handle.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_NULL_POINTER – pIface is NULL.
-
TY_CAPI TYForceDeviceIP(TY_INTERFACE_HANDLE ifaceHandle, const char *MAC, const char *newIP, const char *newNetMask, const char *newGateway)
Force a ethernet device to use new IP address, useful when device use persistent IP and cannot be found.
- 参数:
ifaceHandle – [in] Interface handle.
MAC – [in] Device MAC, should be “xx:xx:xx:xx:xx:xx”.
newIP – [in] New IP.
newNetMask – [in] New subnet mask.
newGateway – [in] New gateway.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NOT_INITED – TYInitLib not called.
TY_STATUS_INVALID_INTERFACE – Invalid interface handle.
TY_STATUS_WRONG_TYPE – Wrong interface type, should be network.
TY_STATUS_NULL_POINTER – MAC or newIP/newNetMask/newGateway is NULL.
TY_STATUS_INVALID_PARAMETER – MAC is not valid.
TY_STATUS_TIMEOUT – No device found.
TY_STATUS_DEVICE_ERROR – Set new IP failed.
-
TY_CAPI TYCloseDevice(TY_DEV_HANDLE hDevice, bool reboot = false)
Close device by device handle.
- 参数:
hDevice – [in] Device handle.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_IDLE – Device has been closed.
-
TY_CAPI TYGetDeviceInfo(TY_DEV_HANDLE hDevice, TY_DEVICE_BASE_INFO *info)
Get base info of the open device.
- 参数:
hDevice – [in] Device handle.
info – [out] Base info out.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_NULL_POINTER – componentIDs is NULL.
-
TY_CAPI TYGetComponentIDs(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID *componentIDs)
Get all components IDs.
- 参数:
hDevice – [in] Device handle.
componentIDs – [out] All component IDs this device has. (bit flag).
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_NULL_POINTER – componentIDs is NULL.
-
TY_CAPI TYGetEnabledComponents(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID *componentIDs)
Get all enabled components IDs.
- 参数:
hDevice – [in] Device handle.
componentIDs – [out] Enabled component IDs.(bit flag)
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_NULL_POINTER – componentIDs is NULL.
-
TY_CAPI TYEnableComponents(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentIDs)
Enable components.
- 参数:
hDevice – [in] Device handle.
componentIDs – [in] Components to be enabled.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Some components specified by componentIDs are invalid.
TY_STATUS_BUSY – Device is capturing.
-
TY_CAPI TYDisableComponents(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentIDs)
Disable components.
- 参数:
hDevice – [in] Device handle.
componentIDs – [in] Components to be disabled.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Some components specified by componentIDs are invalid.
TY_STATUS_BUSY – Device is capturing.
-
TY_CAPI TYGetFrameBufferSize(TY_DEV_HANDLE hDevice, uint32_t *bufferSize)
Get total buffer size of one frame in current configuration.
- 参数:
hDevice – [in] Device handle.
bufferSize – [out] Buffer size per frame.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_NULL_POINTER – bufferSize is NULL.
-
TY_CAPI TYEnqueueBuffer(TY_DEV_HANDLE hDevice, void *buffer, uint32_t bufferSize)
Enqueue a user allocated buffer.
- 参数:
hDevice – [in] Device handle.
buffer – [in] Buffer to be enqueued.
bufferSize – [in] Size of the input buffer.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_NULL_POINTER – buffer is NULL.
TY_STATUS_WRONG_SIZE – The input buffer is not large enough.
-
TY_CAPI TYClearBufferQueue(TY_DEV_HANDLE hDevice)
Clear the internal buffer queue, so that user can release all the buffer.
- 参数:
hDevice – [in] Device handle.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_BUSY – Device is capturing.
-
TY_CAPI TYStartCapture(TY_DEV_HANDLE hDevice)
Start capture.
- 参数:
hDevice – [in] Device handle.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – No components enabled.
TY_STATUS_BUSY – Device has been started.
TY_STATUS_DEVICE_ERROR – Start capture failed.
-
TY_CAPI TYStopCapture(TY_DEV_HANDLE hDevice)
Stop capture.
- 参数:
hDevice – [in] Device handle.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_IDLE – Device is not capturing.
TY_STATUS_DEVICE_ERROR – Stop capture failed.
-
TY_CAPI TYSendSoftTrigger(TY_DEV_HANDLE hDevice)
Send a software trigger to capture a frame when device works in trigger mode.
- 参数:
hDevice – [in] Device handle.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_FEATURE – Not support soft trigger.
TY_STATUS_IDLE – Device has not started capture.
TY_STATUS_WRONG_MODE – Not in trigger mode.
-
TY_CAPI TYRegisterEventCallback(TY_DEV_HANDLE hDevice, TY_EVENT_CALLBACK callback, void *userdata)
Register device status callback.
Register NULL to clean callback.
- 参数:
hDevice – [in] Device handle.
callback – [in] Callback function.
userdata – [in] User private data.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_BUSY – Device is capturing.
-
TY_CAPI TYRegisterImuCallback(TY_DEV_HANDLE hDevice, TY_IMU_CALLBACK callback, void *userdata)
Register imu callback.
Register NULL to clean callback.
- 参数:
hDevice – [in] Device handle.
callback – [in] Callback function.
userdata – [in] User private data.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_BUSY – Device is capturing.
-
TY_CAPI TYFetchFrame(TY_DEV_HANDLE hDevice, TY_FRAME_DATA *frame, int32_t timeout)
Fetch one frame.
- 参数:
hDevice – [in] Device handle.
frame – [out] Frame data to be filled.
timeout – [in] Timeout in milliseconds. <0 for infinite.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_NULL_POINTER – frame is NULL.
TY_STATUS_IDLE – Device capturing is not started.
TY_STATUS_WRONG_MODE – Callback has been registered, this function is disabled.
TY_STATUS_TIMEOUT – Timeout.
-
TY_CAPI TYHasFeature(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, bool *value)
Check whether a component has a specific feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [out] Whether has feature.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_NULL_POINTER – value is NULL.
-
TY_CAPI TYGetFeatureInfo(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_FEATURE_INFO *featureInfo)
Get feature info.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
featureInfo – [out] Feature info.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_NULL_POINTER – featureInfo is NULL.
-
TY_CAPI TYGetIntRange(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_INT_RANGE *intRange)
Get value range of integer feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
intRange – [out] Integer range to be filled.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_INT.
TY_STATUS_NULL_POINTER – intRange is NULL.
-
TY_CAPI TYGetInt(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, int32_t *value)
Get value of integer feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [out] Integer value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_INT.
TY_STATUS_NULL_POINTER – value is NULL.
-
TY_CAPI TYSetInt(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, int32_t value)
Set value of integer feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [in] Integer value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_INT.
TY_STATUS_OUT_OF_RANGE – value is out of range.
TY_STATUS_BUSY – Device is capturing, the feature is locked.
-
TY_CAPI TYGetFloatRange(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_FLOAT_RANGE *floatRange)
Get value range of float feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
floatRange – [out] Float range to be filled.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_FLOAT.
TY_STATUS_NULL_POINTER – floatRange is NULL.
-
TY_CAPI TYGetFloat(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, float *value)
Get value of float feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [out] Float value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_FLOAT.
TY_STATUS_NULL_POINTER – value is NULL.
-
TY_CAPI TYSetFloat(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, float value)
Set value of float feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [in] Float value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_FLOAT.
TY_STATUS_OUT_OF_RANGE – value is out of range.
TY_STATUS_BUSY – Device is capturing, the feature is locked.
-
TY_CAPI TYGetEnumEntryCount(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint32_t *entryCount)
Get number of enum entries.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
entryCount – [out] Entry count.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_ENUM.
TY_STATUS_NULL_POINTER – entryCount is NULL.
-
TY_CAPI TYGetEnumEntryInfo(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_ENUM_ENTRY *entries, uint32_t entryCount, uint32_t *filledEntryCount)
Get list of enum entries.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
entries – [out] Output entries.
entryCount – [in] Array size of input parameter “entries”.
filledEntryCount – [out] Number of filled entries.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_ENUM.
TY_STATUS_NULL_POINTER – entries or filledEntryCount is NULL.
-
TY_CAPI TYGetEnum(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint32_t *value)
Get current value of enum feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [out] Enum value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_ENUM.
TY_STATUS_NULL_POINTER – value is NULL.
-
TY_CAPI TYSetEnum(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint32_t value)
Set value of enum feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [in] Enum value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_ENUM.
TY_STATUS_INVALID_PARAMETER – value is invalid.
TY_STATUS_BUSY – Device is capturing, the feature is locked.
-
TY_CAPI TYGetBool(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, bool *value)
Get value of bool feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [out] Bool value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_BOOL.
TY_STATUS_NULL_POINTER – value is NULL.
-
TY_CAPI TYSetBool(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, bool value)
Set value of bool feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
value – [in] Bool value.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_BOOL.
TY_STATUS_BUSY – Device is capturing, the feature is locked.
-
TY_CAPI TYGetStringLength(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint32_t *size)
Get internal buffer size of string feature.
参见
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
size – [out] String length including ‘\0’.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_STRING.
TY_STATUS_NULL_POINTER – size is NULL.
-
TY_CAPI TYGetString(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, char *buffer, uint32_t bufferSize)
Get value of string feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
buffer – [out] String buffer.
bufferSize – [in] Size of buffer.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_STRING.
TY_STATUS_NULL_POINTER – buffer is NULL.
-
TY_CAPI TYSetString(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, const char *buffer)
Set value of string feature.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
buffer – [in] String buffer.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_STRING.
TY_STATUS_NULL_POINTER – buffer is NULL.
TY_STATUS_OUT_OF_RANGE – Input string is too long.
TY_STATUS_BUSY – Device is capturing, the feature is locked.
-
TY_CAPI TYGetStruct(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, void *pStruct, uint32_t structSize)
Get value of struct.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
pStruct – [out] Pointer of struct.
structSize – [in] Size of input buffer pStruct..
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_STRUCT.
TY_STATUS_NULL_POINTER – pStruct is NULL.
TY_STATUS_WRONG_SIZE – structSize incorrect.
-
TY_CAPI TYSetStruct(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, void *pStruct, uint32_t structSize)
Set value of struct.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
pStruct – [in] Pointer of struct.
structSize – [in] Size of struct.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_STRUCT.
TY_STATUS_NULL_POINTER – pStruct is NULL.
TY_STATUS_WRONG_SIZE – structSize incorrect.
TY_STATUS_BUSY – Device is capturing, the feature is locked.
-
TY_CAPI TYGetByteArraySize(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint32_t *pSize)
Get the size of specified byte array zone .
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
pSize – [out] size of specified byte array zone.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_BYTEARRAY.
TY_STATUS_NULL_POINTER – pSize is NULL.
-
TY_CAPI TYGetDeviceFeatureNumber(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, uint32_t *size)
Get the size of device features .
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
pSize – [out] size of all feature cnt.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_NULL_POINTER – pSize is NULL.
-
TY_CAPI TYGetDeviceFeatureInfo(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_INFO *featureInfo, uint32_t entryCount, uint32_t *filledEntryCount)
Get the all features by comp id.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureInfo – [out] Output feature info.
entryCount – [in] Array size of input parameter “featureInfo”.
filledEntryCount – [out] Number of filled featureInfo.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_NULL_POINTER – featureInfo or filledEntryCount is NULL.
-
TY_CAPI TYGetByteArray(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, uint8_t *pBuffer, uint32_t bufferSize)
Read byte array from device.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
pbuffer – [out] byte buffer.
bufferSize – [in] Size of buffer.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_BYTEARRAY.
TY_STATUS_NULL_POINTER – pbuffer is NULL.
TY_STATUS_WRONG_SIZE – bufferSize incorrect.
-
TY_CAPI TYSetByteArray(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, const uint8_t *pBuffer, uint32_t bufferSize)
Write byte array to device.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
pbuffer – [out] byte buffer.
bufferSize – [in] Size of buffer.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_BYTEARRAY.
TY_STATUS_NULL_POINTER – pbuffer is NULL.
TY_STATUS_WRONG_SIZE – bufferSize incorrect.
TY_STATUS_BUSY – Device is capturing, the feature is locked.
-
TY_CAPI TYGetByteArrayAttr(TY_DEV_HANDLE hDevice, TY_COMPONENT_ID componentID, TY_FEATURE_ID featureID, TY_BYTEARRAY_ATTR *pAttr)
Write byte array to device.
- 参数:
hDevice – [in] Device handle.
componentID – [in] Component ID.
featureID – [in] Feature ID.
pAttr – [out] byte array attribute to be filled.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_INVALID_HANDLE – Invalid device handle.
TY_STATUS_INVALID_COMPONENT – Invalid component ID.
TY_STATUS_INVALID_FEATURE – Invalid feature ID.
TY_STATUS_NOT_PERMITTED – The feature is not writable.
TY_STATUS_WRONG_TYPE – The feature’s type is not TY_FEATURE_BYTEARRAY.
TY_STATUS_NULL_POINTER – pbuffer is NULL.
-
TY_CAPI _TYInitLib(void)
Variables
- typedef enum
- typedef TY_DO_5V = 1
- typedef TY_DO_12V = 2
- typedef TY_E_VOLT_T_LIST
- typedef TY_DO_HIGH = 1
- typedef TY_DO_PWM = 2
- typedef TY_DO_CAM_TRIG = 3
- typedef TY_E_DO_MODE_LIST
- typedef TY_DI_NE_INT = 1
- typedef TY_DI_PE_INT = 2
- typedef TY_E_DI_MODE_LIST
- typedef TY_DI_INT_TRIG_CAP = 1
- typedef TY_DI_INT_EVENT = 2
- typedef TY_E_DI_INT_ACTION_LIST
-
struct TY_VERSION_INFO
- #include <TYApi.h>
Public Members
-
int32_t major
-
int32_t minor
-
int32_t patch
-
int32_t reserved
-
int32_t major
-
struct TY_DEVICE_NET_INFO
- #include <TYApi.h>
device network information
Public Members
-
char mac[32]
-
char ip[32]
-
char netmask[32]
-
char gateway[32]
-
char broadcast[32]
-
char reserved[96]
-
char mac[32]
-
struct TY_DEVICE_USB_INFO
- #include <TYApi.h>
Public Members
-
int bus
-
int addr
-
char reserved[248]
-
int bus
-
struct TY_INTERFACE_INFO
- #include <TYApi.h>
Public Members
-
char name[32]
-
char id[32]
-
TY_INTERFACE_TYPE type
-
char reserved[4]
-
TY_DEVICE_NET_INFO netInfo
-
char name[32]
-
struct TY_DEVICE_BASE_INFO
- #include <TYApi.h>
Public Members
-
TY_INTERFACE_INFO iface
-
char id[32]
device serial number
-
char vendorName[32]
-
char userDefinedName[32]
-
char modelName[32]
device model name
-
TY_VERSION_INFO hardwareVersion
deprecated
-
TY_VERSION_INFO firmwareVersion
deprecated
-
TY_DEVICE_NET_INFO netInfo
-
TY_DEVICE_USB_INFO usbInfo
-
union TY_DEVICE_BASE_INFO::[anonymous] [anonymous]
-
char buildHash[256]
-
char configVersion[256]
-
char reserved[256]
-
TY_INTERFACE_INFO iface
-
struct TY_FEATURE_INFO
- #include <TYApi.h>
Public Members
-
bool isValid
true if feature exists, false otherwise
-
TY_ACCESS_MODE accessMode
feature access privilege
-
bool writableAtRun
feature can be written while capturing
-
char reserved0[1]
-
TY_COMPONENT_ID componentID
owner of this feature
-
TY_FEATURE_ID featureID
feature unique id
-
char name[32]
describe string
-
TY_COMPONENT_ID bindComponentID
component ID current feature bind to
-
TY_FEATURE_ID bindFeatureID
feature ID current feature bind to
-
char reserved[252]
-
bool isValid
-
struct TY_INT_RANGE
- #include <TYApi.h>
Public Members
-
int32_t min
-
int32_t max
-
int32_t inc
increaing step
-
int32_t reserved[1]
-
int32_t min
-
struct TY_FLOAT_RANGE
- #include <TYApi.h>
float range data structure
Public Members
-
float min
-
float max
-
float inc
increaing step
-
float reserved[1]
-
float min
-
struct TY_BYTEARRAY_ATTR
- #include <TYApi.h>
byte array data structure
Public Members
-
int32_t size
Bytes array size in bytes.
-
int32_t unit_size
unit size in bytes for special parse
-
int32_t valid_size
valid size in bytes in case has reserved member, Must be multiple of unit_size, mem_length = valid_size/unit_size
-
int32_t size
-
struct TY_ENUM_ENTRY
- #include <TYApi.h>
enum feature entry information
Public Members
-
char description[64]
-
uint32_t value
-
uint32_t reserved[3]
-
char description[64]
-
struct TY_VECT_3F
- #include <TYApi.h>
Public Members
-
float x
-
float y
-
float z
-
float x
-
struct TY_CAMERA_INTRINSIC
- #include <TYApi.h>
a 3x3 matrix
.
.
.
fx
0
cx
0
fy
cy
0
0
1
参见
TYGetStruct Usage:
TY_CAMERA_INTRINSIC intrinsic; TYGetStruct(hDevice, some_compoent, TY_STRUCT_CAM_INTRINSIC, &intrinsic, sizeof(intrinsic));
Public Members
-
float data[3 * 3]
-
float data[3 * 3]
-
struct TY_CAMERA_EXTRINSIC
- #include <TYApi.h>
a 4x4 matrix
.
.
.
.
r11
r12
r13
t1
r21
r22
r23
t2
r31
r32
r33
t3
0
0
0
1
参见
TYGetStruct Usage:
TY_CAMERA_EXTRINSIC extrinsic; TYGetStruct(hDevice, some_compoent, TY_STRUCT_EXTRINSIC, &extrinsic, sizeof(extrinsic));
Public Members
-
float data[4 * 4]
-
float data[4 * 4]
-
struct TY_CAMERA_DISTORTION
- #include <TYApi.h>
camera distortion parameters
参见
TYGetStruct Usage:
TY_CAMERA_DISTORTION distortion; TYGetStruct(hDevice, some_compoent, TY_STRUCT_CAM_DISTORTION, &distortion, sizeof(distortion));
Public Members
-
float data[12]
Definition is compatible with opencv3.0+ :k1,k2,p1,p2,k3,k4,k5,k6,s1,s2,s3,s4.
-
float data[12]
-
struct TY_CAMERA_CALIB_INFO
- #include <TYApi.h>
camera ‘s cailbration data
参见
Public Members
-
int32_t intrinsicWidth
-
int32_t intrinsicHeight
-
TY_CAMERA_INTRINSIC intrinsic
-
TY_CAMERA_EXTRINSIC extrinsic
-
TY_CAMERA_DISTORTION distortion
-
int32_t intrinsicWidth
-
struct TY_TRIGGER_PARAM
- #include <TYApi.h>
-
struct TY_TRIGGER_PARAM_EX
- #include <TYApi.h>
Public Members
-
TY_TRIGGER_MODE mode
-
int8_t fps
-
int8_t duty
-
int32_t laser_stream
-
int32_t led_stream
-
int32_t led_expo
-
int32_t led_gain
-
int32_t ir_gain[2]
-
int32_t rsvd[32]
-
union TY_TRIGGER_PARAM_EX::[anonymous] [anonymous]
-
TY_TRIGGER_MODE mode
-
struct TY_TRIGGER_TIMER_LIST
- #include <TYApi.h>
Public Members
-
uint64_t start_time_us
-
uint32_t offset_us_count
-
uint32_t offset_us_list[50]
-
uint64_t start_time_us
-
struct TY_TRIGGER_TIMER_PERIOD
- #include <TYApi.h>
Public Members
-
uint64_t start_time_us
-
uint32_t trigger_count
-
uint32_t period_us
-
uint64_t start_time_us
-
struct TY_AEC_ROI_PARAM
- #include <TYApi.h>
Public Members
-
uint32_t x
-
uint32_t y
-
uint32_t w
-
uint32_t h
-
uint32_t x
-
struct TY_CAMERA_STATISTICS
- #include <TYApi.h>
Public Members
-
uint64_t packetReceived
-
uint64_t packetLost
-
uint64_t imageOutputed
-
uint64_t imageDropped
-
uint8_t rsvd[1024]
-
uint64_t packetReceived
-
struct TY_IMU_DATA
- #include <TYApi.h>
Public Members
-
uint64_t timestamp
-
float acc_x
-
float acc_y
-
float acc_z
-
float gyro_x
-
float gyro_y
-
float gyro_z
-
float temperature
-
float reserved[1]
-
uint64_t timestamp
-
struct TY_ACC_BIAS
- #include <TYApi.h>
a 3x3 matrix
.
.
.
BIASx
BIASy
BIASz
Public Members
-
float data[3]
-
float data[3]
-
struct TY_ACC_MISALIGNMENT
- #include <TYApi.h>
a 3x3 matrix
|.
|.|.|
.
.
.
1
-GAMAyz
GAMAzy
GAMAxz
1
-GAMAzx
-GAMAxy
GAMAyx
1
Public Members
-
float data[3 * 3]
-
float data[3 * 3]
-
struct TY_ACC_SCALE
- #include <TYApi.h>
a 3x3 matrix
.
.
.
SCALEx
0
0
0
SCALEy
0
0
0
SCALEz
Public Members
-
float data[3 * 3]
-
float data[3 * 3]
-
struct TY_GYRO_BIAS
- #include <TYApi.h>
a 3x3 matrix
.
.
.
BIASx
BIASy
BIASz
Public Members
-
float data[3]
-
float data[3]
-
struct TY_GYRO_MISALIGNMENT
- #include <TYApi.h>
a 3x3 matrix
.
.
.
1
-ALPHAyz
ALPHAzy
0
1
-ALPHAzx
0
0
1
Public Members
-
float data[3 * 3]
-
float data[3 * 3]
-
struct TY_GYRO_SCALE
- #include <TYApi.h>
a 3x3 matrix
.
.
.
SCALEx
0
0
0
SCALEy
0
0
0
SCALEz
Public Members
-
float data[3 * 3]
-
float data[3 * 3]
-
struct TY_CAMERA_TO_IMU
- #include <TYApi.h>
a 4x4 matrix
.
.
.
.
r11
r12
r13
t1
r21
r22
r23
t2
r31
r32
r33
t3
0
0
0
1
Public Members
-
float data[4 * 4]
-
float data[4 * 4]
-
struct TY_TOF_FREQ
- #include <TYApi.h>
Public Members
-
uint32_t freq1
-
uint32_t freq2
-
uint32_t freq1
-
struct TY_IMAGE_DATA
- #include <TYApi.h>
Public Members
-
uint64_t timestamp
Timestamp in microseconds.
-
int32_t imageIndex
image index used in trigger mode
-
int32_t status
Status of this buffer.
-
int32_t componentID
Where current data come from.
-
int32_t size
Buffer size.
-
void *buffer
Pointer to data buffer.
-
int32_t width
Image width in pixels.
-
int32_t height
Image height in pixels.
-
int32_t pixelFormat
Pixel format, see TY_PIXEL_FORMAT_LIST.
-
int32_t reserved[9]
Reserved.
-
uint64_t timestamp
-
struct TY_FRAME_DATA
- #include <TYApi.h>
Public Members
-
void *userBuffer
Pointer to user enqueued buffer, user should enqueue this buffer in the end of callback.
-
int32_t bufferSize
Size of userBuffer.
-
int32_t validCount
Number of valid data.
-
int32_t reserved[6]
Reserved: reserved[0],laser_val;.
-
TY_IMAGE_DATA image[10]
Buffer data, max to 10 images per frame, each buffer data could be an image or something else.
-
void *userBuffer
-
struct TY_EVENT_INFO
- #include <TYApi.h>
-
struct TY_DO_WORKMODE
- #include <TYApi.h>
Public Members
-
TY_E_DO_MODE mode
-
TY_E_VOLT_T volt
-
uint32_t freq
-
uint32_t duty
-
uint32_t mode_supported
-
uint32_t volt_supported
-
uint32_t reserved[3]
-
TY_E_DO_MODE mode
-
struct TY_DI_WORKMODE
- #include <TYApi.h>
Public Members
-
TY_E_DI_MODE mode
-
TY_E_DI_INT_ACTION int_act
-
uint32_t mode_supported
-
uint32_t int_act_supported
-
uint32_t status
-
uint32_t reserved[3]
-
TY_E_DI_MODE mode
API for coodinate mapping functions
Coordinate Conversion API.
- Copyright
Copyright(C)2016-2018 Percipio All Rights Reserved
备注
Considering performance, we leave the responsibility of parameters check to users.
Defines
-
TYMAP_CHECKRET(f, bufToFree)
Typedefs
-
typedef struct TY_PIXEL_DESC TY_PIXEL_DESC
-
typedef struct TY_PIXEL_COLOR_DESC TY_PIXEL_COLOR_DESC
Functions
-
TY_CAPI TYInvertExtrinsic(const TY_CAMERA_EXTRINSIC *orgExtrinsic, TY_CAMERA_EXTRINSIC *invExtrinsic)
Calculate 4x4 extrinsic matrix’s inverse matrix.
- 参数:
orgExtrinsic – [in] Input extrinsic matrix.
invExtrinsic – [out] Inverse matrix.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_ERROR – Calculation failed.
-
TY_CAPI TYMapDepthToPoint3d(const TY_CAMERA_CALIB_INFO *src_calib, uint32_t depthW, uint32_t depthH, const TY_PIXEL_DESC *depthPixels, uint32_t count, TY_VECT_3F *point3d, float f_scale_unit = 1.0f)
Map pixels on depth image to 3D points.
- 参数:
src_calib – [in] Depth image’s calibration data.
depthW – [in] Width of depth image.
depthH – [in] Height of depth image.
depthPixels – [in] Pixels on depth image.
count – [in] Number of depth pixels.
point3d – [out] Output point3D.
- 返回值:
TY_STATUS_OK – Succeed.
-
TY_CAPI TYMapPoint3dToDepth(const TY_CAMERA_CALIB_INFO *dst_calib, const TY_VECT_3F *point3d, uint32_t count, uint32_t depthW, uint32_t depthH, TY_PIXEL_DESC *depth, float f_scale_unit = 1.0f)
Map 3D points to pixels on depth image.
Reverse operation of TYMapDepthToPoint3d.
- 参数:
dst_calib – [in] Target depth image’s calibration data.
point3d – [in] Input 3D points.
count – [in] Number of points.
depthW – [in] Width of target depth image.
depthH – [in] Height of target depth image.
depth – [out] Output depth pixels.
- 返回值:
TY_STATUS_OK – Succeed.
-
TY_CAPI TYMapDepthImageToPoint3d(const TY_CAMERA_CALIB_INFO *src_calib, int32_t imageW, int32_t imageH, const uint16_t *depth, TY_VECT_3F *point3d, float f_scale_unit = 1.0f)
Map depth image to 3D points.
0 depth pixels maps to (NAN, NAN, NAN).
- 参数:
src_calib – [in] Depth image’s calibration data.
depthW – [in] Width of depth image.
depthH – [in] Height of depth image.
depth – [in] Depth image.
point3d – [out] Output point3D image.
- 返回值:
TY_STATUS_OK – Succeed.
-
TY_CAPI TYMapPoint3dToDepthImage(const TY_CAMERA_CALIB_INFO *dst_calib, const TY_VECT_3F *point3d, uint32_t count, uint32_t depthW, uint32_t depthH, uint16_t *depth, float f_target_scale = 1.0f)
Map 3D points to depth image.
(NAN, NAN, NAN) will be skipped.
- 参数:
dst_calib – [in] Target depth image’s calibration data.
point3d – [in] Input 3D points.
count – [in] Number of points.
depthW – [in] Width of target depth image.
depthH – [in] Height of target depth image.
depth – [inout] Depth image buffer.
- 返回值:
TY_STATUS_OK – Succeed.
-
TY_CAPI TYMapPoint3dToPoint3d(const TY_CAMERA_EXTRINSIC *extrinsic, const TY_VECT_3F *point3dFrom, int32_t count, TY_VECT_3F *point3dTo)
Map 3D points to another coordinate.
- 参数:
extrinsic – [in] Extrinsic matrix.
point3dFrom – [in] Source 3D points.
count – [in] Number of source 3D points.
point3dTo – [out] Target 3D points.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYMapDepthToColorCoordinate(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const TY_PIXEL_DESC *depth, uint32_t count, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t mappedW, uint32_t mappedH, TY_PIXEL_DESC *mappedDepth, float f_scale_unit = 1.0f)
Map depth pixels to color coordinate pixels.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Depth image pixels.
count – [in] Number of depth image pixels.
color_calib – [in] Color image’s calibration data.
mappedW – [in] Width of target depth image.
mappedH – [in] Height of target depth image.
mappedDepth – [out] Output pixels.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYMapDepthImageToColorCoordinate(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const uint16_t *depth, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t mappedW, uint32_t mappedH, uint16_t *mappedDepth, float f_scale_unit = 1.0f)
Map original depth image to color coordinate depth image.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Depth image.
color_calib – [in] Color image’s calibration data.
mappedW – [in] Width of target depth image.
mappedH – [in] Height of target depth image.
mappedDepth – [out] Output pixels.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYCreateDepthToColorCoordinateLookupTable(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const uint16_t *depth, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t mappedW, uint32_t mappedH, TY_PIXEL_DESC *lut, float f_scale_unit = 1.0f)
Create depth image to color coordinate lookup table.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Depth image.
color_calib – [in] Color image’s calibration data.
mappedW – [in] Width of target depth image.
mappedH – [in] Height of target depth image.
lut – [out] Output lookup table.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYMapRGBPixelsToDepthCoordinate(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const uint16_t *depth, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t rgbW, uint32_t rgbH, TY_PIXEL_COLOR_DESC *src, uint32_t cnt, uint32_t min_distance, uint32_t max_distance, TY_PIXEL_COLOR_DESC *dst, float f_scale_unit = 1.0f)
Map original RGB pixels to depth coordinate.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Current depth image.
color_calib – [in] Color image’s calibration data.
rgbW – [in] Width of RGB image.
rgbH – [in] Height of RGB image.
src – [in] Input RGB pixels info.
cnt – [in] Input src RGB pixels cnt
min_distance – [in] The min distance(mm), which is generally set to the minimum measured distance of the current camera
max_distance – [in] The longest distance(mm), which is generally set to the longest measuring distance of the current camera
dst – [out] Output RGB pixels info.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYMapRGBImageToDepthCoordinate(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const uint16_t *depth, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t rgbW, uint32_t rgbH, const uint8_t *inRgb, uint8_t *mappedRgb, float f_scale_unit = 1.0f)
Map original RGB image to depth coordinate RGB image.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Current depth image.
color_calib – [in] Color image’s calibration data.
rgbW – [in] Width of RGB image.
rgbH – [in] Height of RGB image.
inRgb – [in] Current RGB image.
mappedRgb – [out] Output RGB image.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYMapRGB48ImageToDepthCoordinate(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const uint16_t *depth, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t rgbW, uint32_t rgbH, const uint16_t *inRgb, uint16_t *mappedRgb, float f_scale_unit = 1.0f)
Map original RGB48 image to depth coordinate RGB image.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Current depth image.
color_calib – [in] Color image’s calibration data.
rgbW – [in] Width of RGB48 image.
rgbH – [in] Height of RGB48 image.
inRgb – [in] Current RGB48 image.
mappedRgb – [out] Output RGB48 image.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYMapMono16ImageToDepthCoordinate(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const uint16_t *depth, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t rgbW, uint32_t rgbH, const uint16_t *gray, uint16_t *mappedGray, float f_scale_unit = 1.0f)
Map original MONO16 image to depth coordinate MONO16 image.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Current depth image.
color_calib – [in] Color image’s calibration data.
rgbW – [in] Width of MONO16 image.
rgbH – [in] Height of MONO16 image.
gray – [in] Current MONO16 image.
mappedGray – [out] Output MONO16 image.
- 返回值:
TY_STATUS_OK – Succeed.
-
static inline TY_STATUS TYMapMono8ImageToDepthCoordinate(const TY_CAMERA_CALIB_INFO *depth_calib, uint32_t depthW, uint32_t depthH, const uint16_t *depth, const TY_CAMERA_CALIB_INFO *color_calib, uint32_t monoW, uint32_t monoH, const uint8_t *inMono, uint8_t *mappedMono, float f_scale_unit = 1.0f)
Map original MONO8 image to depth coordinate MONO8 image.
- 参数:
depth_calib – [in] Depth image’s calibration data.
depthW – [in] Width of current depth image.
depthH – [in] Height of current depth image.
depth – [in] Current depth image.
color_calib – [in] Color image’s calibration data.
monoW – [in] Width of MONO8 image.
monoH – [in] Height of MONO8 image.
inMono – [in] Current MONO8 image.
mappedMono – [out] Output MONO8 image.
- 返回值:
TY_STATUS_OK – Succeed.
-
struct TY_PIXEL_DESC
- #include <TYCoordinateMapper.h>
Public Members
-
int16_t x
-
int16_t y
-
uint16_t depth
-
uint16_t rsvd
-
int16_t x
-
struct TY_PIXEL_COLOR_DESC
- #include <TYCoordinateMapper.h>
Public Members
-
int16_t x
-
int16_t y
-
uint8_t bgr_ch1
-
uint8_t bgr_ch2
-
uint8_t bgr_ch3
-
uint8_t rsvd
-
int16_t x
API for Depth and IR image post processing
@breif Image post-process API
- Copyright
Copyright(C)2016-2018 Percipio All Rights Reserved
Defines
-
DepthSpeckleFilterParameters_Initializer
-
DepthEnhenceParameters_Initializer
Functions
-
TY_CAPI TYImageProcesAcceEnable(bool en)
Image processing acceleration switch.
- 参数:
en – [in] Enable image process acceleration switch
-
TY_CAPI TYUndistortImage(const TY_CAMERA_CALIB_INFO *srcCalibInfo, const TY_IMAGE_DATA *srcImage, const TY_CAMERA_INTRINSIC *cameraNewIntrinsic, TY_IMAGE_DATA *dstImage)
Do image undistortion, only support TY_PIXEL_FORMAT_MONO ,TY_PIXEL_FORMAT_RGB,TY_PIXEL_FORMAT_BGR.
- 参数:
srcCalibInfo – [in] Image calibration data.
srcImage – [in] Source image.
cameraNewIntrinsic – [in] Expected new image intrinsic, will use srcCalibInfo for new image intrinsic if set to NULL.
dstImage – [out] Output image.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NULL_POINTER – Any srcCalibInfo, srcImage, dstImage, srcImage->buffer, dstImage->buffer is NULL.
TY_STATUS_INVALID_PARAMETER – Invalid srcImage->width, srcImage->height, dstImage->width, dstImage->height or unsupported pixel format.
-
TY_CAPI TYDepthSpeckleFilter(TY_IMAGE_DATA *depthImage, const DepthSpeckleFilterParameters *param)
Remove speckles on depth image.
- 参数:
depthImage – [inout] Depth image to be processed.
param – [in] Algorithm parameters.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NULL_POINTER – Any depth, param or depth->buffer is NULL.
TY_STATUS_INVALID_PARAMETER – param->max_speckle_size <= 0 or param->max_speckle_diff <= 0
-
TY_CAPI TYDepthEnhenceFilter(const TY_IMAGE_DATA *depthImages, int imageNum, TY_IMAGE_DATA *guide, TY_IMAGE_DATA *output, const DepthEnhenceParameters *param)
Remove speckles on depth image.
- 参数:
depthImage – [in] Pointer to depth image array.
imageNum – [in] Depth image array size.
guide – [inout] Guide image.
output – [out] Output depth image.
param – [in] Algorithm parameters.
- 返回值:
TY_STATUS_OK – Succeed.
TY_STATUS_NULL_POINTER – Any depthImage, param, output or output->buffer is NULL.
TY_STATUS_INVALID_PARAMETER – imageNum >= 11 or imageNum <= 0, or any image invalid
TY_STATUS_OUT_OF_MEMORY – Output image not suitable.
-
struct DepthSpeckleFilterParameters
- #include <TYImageProc.h>
Public Members
-
int max_speckle_size
-
int max_speckle_diff
-
int max_speckle_size
-
struct DepthEnhenceParameters
- #include <TYImageProc.h>
Public Members
-
float sigma_s
filter param on space
-
float sigma_r
filter param on range
-
int outlier_win_sz
outlier filter windows ize
-
float outlier_rate
-
float sigma_s
API for Color image post processing
@breif this file Include interface declare for raw color image (bayer format) process functions
Copyright(C)2016-2019 Percipio All Rights Reserved
Defines
-
TYISP_CAPI
Typedefs
-
typedef void *TY_ISP_HANDLE
Enums
-
enum TY_ISP_FEATURE_ID
Values:
-
enumerator TY_ISP_FEATURE_CAM_MODEL
-
enumerator TY_ISP_FEATURE_CAM_DEV_HANDLE
device handle for device control
-
enumerator TY_ISP_FEATURE_CAM_DEV_COMPONENT
the component to control
-
enumerator TY_ISP_FEATURE_IMAGE_SIZE
image size width&height
-
enumerator TY_ISP_FEATURE_WHITEBALANCE_GAIN
-
enumerator TY_ISP_FEATURE_ENABLE_AUTO_WHITEBALANCE
-
enumerator TY_ISP_FEATURE_SHADING
-
enumerator TY_ISP_FEATURE_SHADING_CENTER
-
enumerator TY_ISP_FEATURE_BLACK_LEVEL
global black level
-
enumerator TY_ISP_FEATURE_BLACK_LEVEL_COLUMN
to set different black level for each image column
-
enumerator TY_ISP_FEATURE_BLACK_LEVEL_GAIN
global pixel gain
-
enumerator TY_ISP_FEATURE_BLACK_LEVEL_GAIN_COLUMN
to set different gain for each image column
-
enumerator TY_ISP_FEATURE_BAYER_PATTERN
-
enumerator TY_ISP_FEATURE_DEMOSAIC_METHOD
-
enumerator TY_ISP_FEATURE_GAMMA
-
enumerator TY_ISP_FEATURE_DEFECT_PIXEL_LIST
-
enumerator TY_ISP_FEATURE_CCM
-
enumerator TY_ISP_FEATURE_CCM_ENABLE
ENABLE CCM.
-
enumerator TY_ISP_FEATURE_BRIGHT
-
enumerator TY_ISP_FEATURE_CONTRAST
-
enumerator TY_ISP_FEATURE_AUTOBRIGHT
-
enumerator TY_ISP_FEATURE_INPUT_RESAMPLE_SCALE
-
enumerator TY_ISP_FEATURE_ENABLE_AUTO_EXPOSURE_GAIN
-
enumerator TY_ISP_FEATURE_AUTO_EXPOSURE_RANGE
exposure range ,default no limit
-
enumerator TY_ISP_FEATURE_AUTO_GAIN_RANGE
gain range ,default no limit
-
enumerator TY_ISP_FEATURE_AUTO_EXPOSURE_UPDATE_INTERVAL
update device exposure interval , default 5 frame
-
enumerator TY_ISP_FEATURE_DEBUG_LOG
display detail log information
-
enumerator TY_ISP_FEATURE_CAM_MODEL
-
enum TY_ISP_BAYER_PATTERN
Values:
-
enumerator TY_ISP_BAYER_GB
-
enumerator TY_ISP_BAYER_BG
-
enumerator TY_ISP_BAYER_RG
-
enumerator TY_ISP_BAYER_GR
-
enumerator TY_ISP_BAYER_AUTO
-
enumerator TY_ISP_BAYER_GB
-
enum TY_DEMOSAIC_METHOD
Values:
-
enumerator TY_DEMOSAIC_METHOD_SIMPLE
-
enumerator TY_DEMOSAIC_METHOD_BILINEAR
-
enumerator TY_DEMOSAIC_METHOD_HQLINEAR
-
enumerator TY_DEMOSAIC_METHOD_EDGESENSE
-
enumerator TY_DEMOSAIC_METHOD_SIMPLE
Functions
-
TYISP_CAPI TYISPCreate(TY_ISP_HANDLE *handle)
-
TYISP_CAPI TYISPRelease(TY_ISP_HANDLE *handle)
-
TYISP_CAPI TYISPLoadConfig(TY_ISP_HANDLE handle, const uint8_t *config, uint32_t config_size)
-
TYISP_CAPI TYISPUpdateDevice(TY_ISP_HANDLE handle)
@breif called by main thread to update & control device status for ISP
-
TYISP_CAPI TYISPSetFeature(TY_ISP_HANDLE handle, TY_ISP_FEATURE_ID feature_id, const uint8_t *data, int32_t size)
-
TYISP_CAPI TYISPGetFeature(TY_ISP_HANDLE handle, TY_ISP_FEATURE_ID feature_id, uint8_t *data_buff, int32_t buff_size)
-
TYISP_CAPI TYISPGetFeatureSize(TY_ISP_HANDLE handle, TY_ISP_FEATURE_ID feature_id, int32_t *size)
-
TYISP_CAPI TYISPHasFeature(TY_ISP_HANDLE handle, TY_ISP_FEATURE_ID feature_id)
-
TYISP_CAPI TYISPGetFeatureInfoList(TY_ISP_HANDLE handle, TY_ISP_FEATURE_INFO *info_buffer, int buffer_size)
-
TYISP_CAPI TYISPGetFeatureInfoListSize(TY_ISP_HANDLE handle, int32_t *buffer_size)
-
TYISP_CAPI TYISPProcessImage(TY_ISP_HANDLE handle, const TY_IMAGE_DATA *image_bayer, TY_IMAGE_DATA *image_out)
@breif convert bayer raw image to rgb image,output buffer is allocated by invoker
-
struct TY_ISP_FEATURE_INFO
- #include <TyIsp.h>