CloudFilter 点云过滤
CloudFilter 算子用于点云过滤。
| 类型 | 功能 |
|---|---|
| 点云大小 | 通过选择不同模式输入参数值进行点云过滤。 |
| 去除重复 | 删除点云类表中重复的数据。 |
点云大小
将 CloudFilter 算子的类型选择点云大小,用于通过选择不同模式输入参数值进行点云过滤。
算子参数
模式/mode:点云过滤的模式。LowerLimit:该模式依据 min_points 进行判断,当输入点云点数 ≤ min_points 时,触发算子 failed 信号。
UpperLimit:该模式依据 max_points 进行判断,当输入点云点数 ≥ max_points 时,触发算子 failed 信号。
BoundLimit:该模式依据 min_points 与 max_points 区间进行判断,当输入点云点数不在 min_points 与 max_points 区间内,触发算子 failed 信号。
最小点数/min_points:限制点云中最小点数。默认值:0 。最大点数/max_points:限制点云中最大点数。默认值:10000 。点云/cloud:设置过滤后点云在 3D 视图中的可视化属性 。 打开过滤后点云可视化。
打开过滤后点云可视化。 关闭过滤后点云可视化。
关闭过滤后点云可视化。 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
点云列表/cloud_list:设置过滤后点云列表在 3D 视图中的的可视化属性。值描述与点云一致。
数据信号输入输出
输入:
注解
根据需求选择其中一种数据信号输入即可。
点云:数据类型:PointCloud
输入内容:点云数据
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
输出:
点云:数据类型:PointCloud
输出内容:点云数据
点云列表:数据类型:PointCloudList
输出内容:点云列表数据
功能演示
使用 CloudFilter 算子类型为 点云大小中 UpperLimit 模式过滤点云。当点云中点数为 3600 时,输入不同的参考值,分别查看对应的结果。
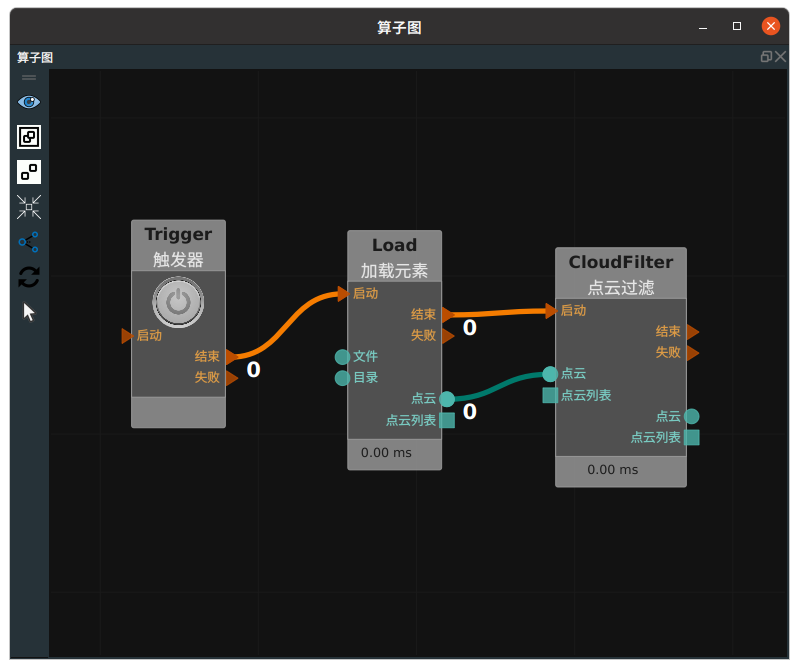
步骤1:算子准备
添加 Trigger 、Load 、CloudFilter 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
 → 选择点云文件名( example_data/pointcloud/wolf1.pcd :此点云点数:3400)
→ 选择点云文件名( example_data/pointcloud/wolf1.pcd :此点云点数:3400)
设置 CloudFilter算子参数:
模式 → UpperLimit
最大点数 → 3600
步骤3:连接算子
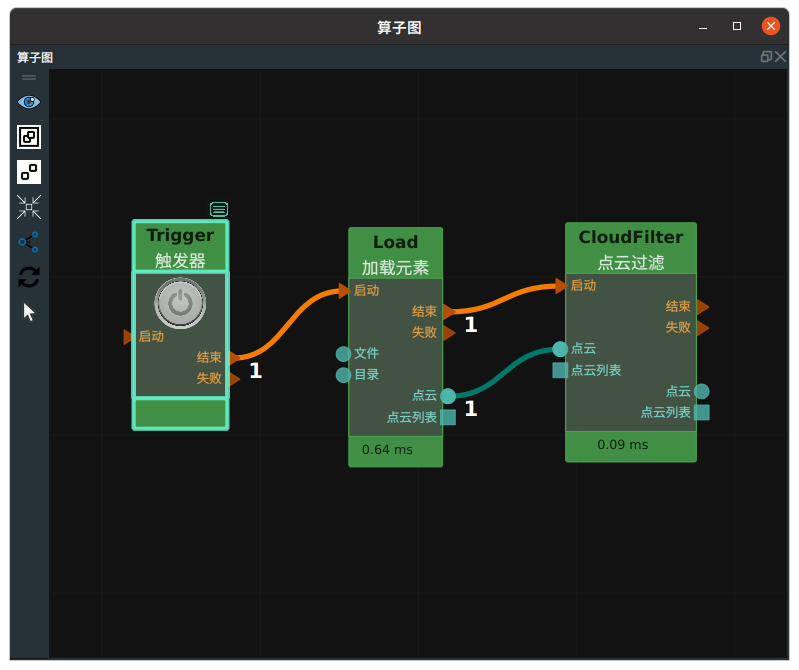
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,根据参考数值不同,运行结果不同。
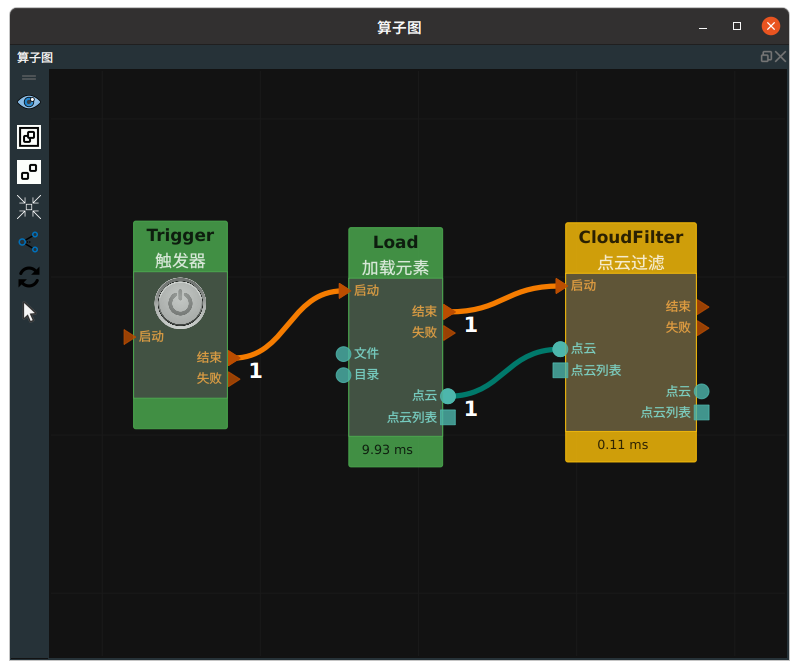
参考数值
最大点数:3600
最小点数:3200 ,点云点数 < 3400,触发failed 信号
去除重复
将 CloudFilter 算子的类型选择 去除重复,用于删除点云类表中重复的数据。
算子参数
点云数量比值阈值/number_percentage:设置点云中心距离阈值中重复点数百分比。将其作为一个阈值,当重复点的比例达到该阈值时,可以认为点云是重复的。取值范围:[0,1]。默认值:0.9。点云中心距离阈值/center_distance:设置其他点与中心点之间的距离。取值范围:[0,+∞]。默认值:0.02。点云列表/cloud_list:设置过滤后点云列表在 3D 视图中的的可视化属性。- 打开过滤后点云列表可视化。
- 关闭过滤后点云列表可视化。
- 设置 3D 视图中点云列表的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
输出:
点云列表:数据类型:PointCloudList
输出内容:去重后点云列表数据
功能演示
使用 CloudFilter 中类型为 Deduplicate,将去除点云列表中重复的数据。
步骤1:算子准备
添加 Trigger 、Load(2个) 、DownSamp(2个)、Concatenate、CloudFilter 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/fruit2.pcd )
设置 Load_1 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/fruit2.pcd )
设置 DownSamp 算子参数:
模式 → 网格降采样
x 方向采样 → 0.011
y 方向采样 → 0.01
z 方向采样 → 0.01
设置 DownSamp_1 算子参数:
模式 → 均匀网格降采样
x 方向采样 → 0.01
设置 Concatenate 算子参数:
类型 → 点云
点云列表 →
可视
设置 CloudFilter 算子参数:
类型 → 去除重复
点云数量比值阈值 →0.9
点云中心距离阈值 → 0.02
点云列表 →
可视
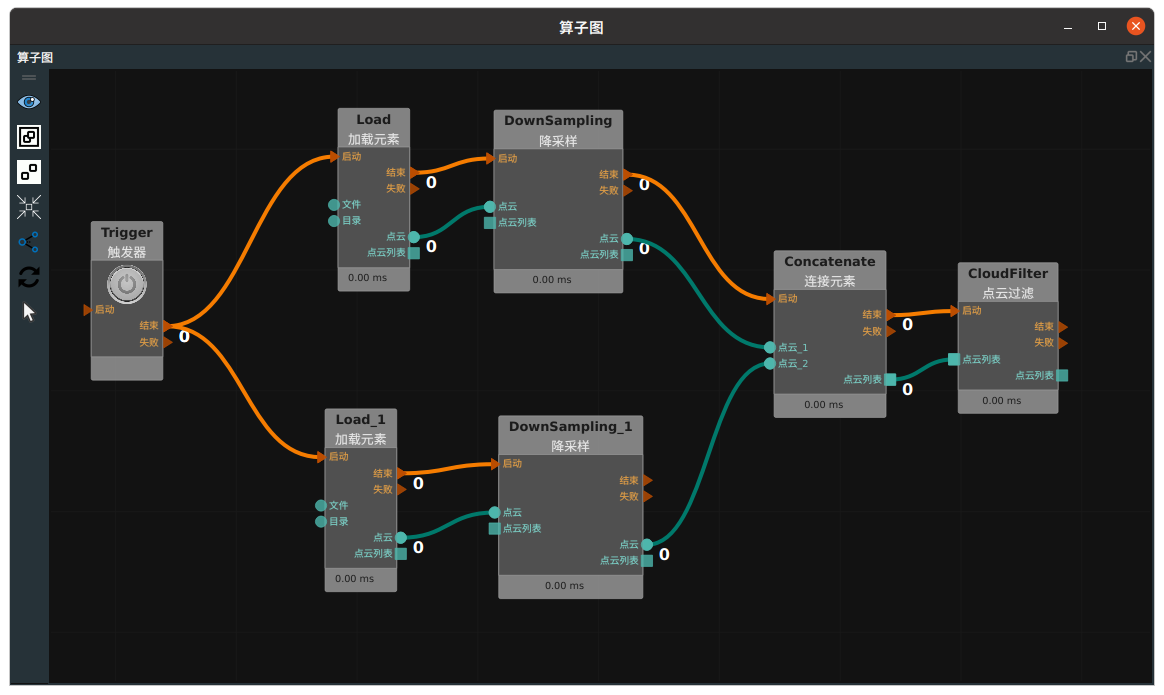
步骤三:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
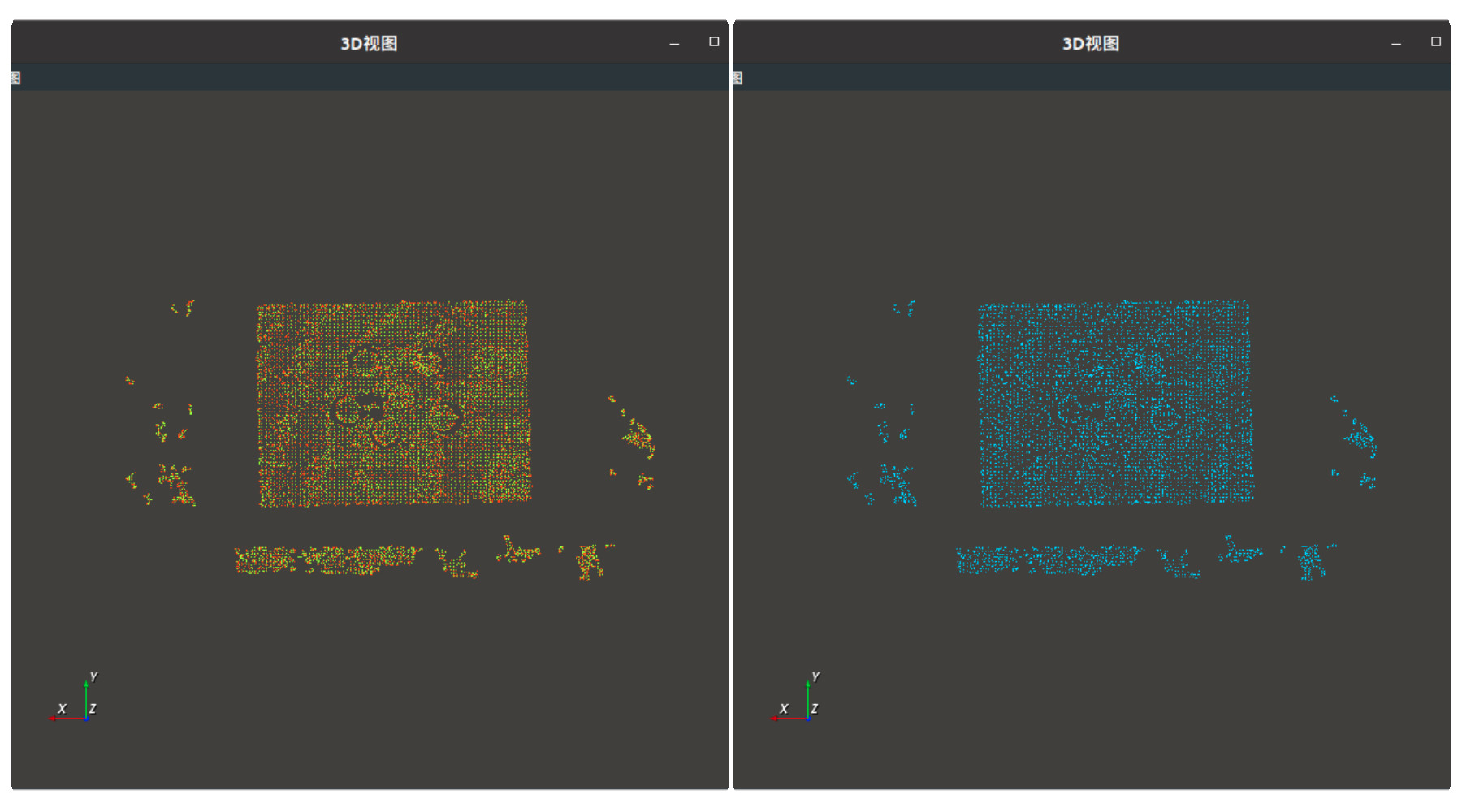
运行结果
如下图所示,左图显示点云列表(两张重合点云),右图显示去重后的点云。