CloudProcess 点云处理
CloudProcess 算子用于点云处理,包含:
| type | 功能 |
|---|---|
| 点云中心坐标 | 功能用于输出点云的 pose 中心。 |
| 计算法向量 | 求出点云相应的法向量。 |
| 合并点云 | 将多个点云合并为一个点云输出。 |
| 去除NaN值 | 用于去除 NAN(不是数)值。(点云图中的 NAN 值代表无效或未定义的点,需要注意检测和处理以避免影响点云的处理和分析结果。) |
| 半径异常值删除 | 半径滤波。对点云中的每一个点确定一个半径的邻域,若邻域范围内点数 < min_neighbors ,则认为该点为噪声点,并剔除。 |
| 统计异常值去除 | 从点云数据集中移除离群点,即测量噪声点。通过计算点到临近点的平均距离分布,设置阈值,对不符合标准的点进行去除。 |
| 法向量过滤 | 计算点云中每个点的 NormalXYZ 与参考 NormalXYZ 的夹角,与最大最小阈值进行比较,选取符合条件的点云输出。 |
| 解析点云 | 用于输出点云或者点云列表的物品类型。 |
| 点云点数 | 用于输出点云的所有点数。 |
| 计算空间高度 | 用于计算点云中空间高度。 |
点云中心坐标
将 CloudProcess 点云处理 类型设置为 点云中心坐标 ,用于输出点云的 pose 中心。
注解
输出的姿态自动选择为基坐标系而不是沿着目标的长宽方向。
算子参数
坐标:设置点云中心 pose 在 3D 视图中的可视化属性。 打开点云中心 pose 可视化。
打开点云中心 pose 可视化。 关闭点云中心 pose 可视化。
关闭点云中心 pose 可视化。 设置点云中心 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1。
设置点云中心 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1。
坐标列表:设置 pose 列表在 3D 视图中的可视化属性。值描述与 pose 一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
点云:数据类型:PointCloud
输入内容:点云数据
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
输出:
坐标:数据类型:Pose
输出内容:点云中心 pose 数据
坐标列表:数据类型:PoseList
输出内容:点云中心 pose 数据列表
功能演示
使用 CloudProcess 算子中点云中心坐标 输出加载点云的 pose 中心。
步骤1:算子准备
添加 Trigger 、Load 、CloudProcess 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
 → 选择点云文件名( example_data/pointcloud/line.pcd )
→ 选择点云文件名( example_data/pointcloud/line.pcd )点云→
可视
设置 CloudProcess 算子参数:
类型→ 点云中心坐标
坐标 →
可视
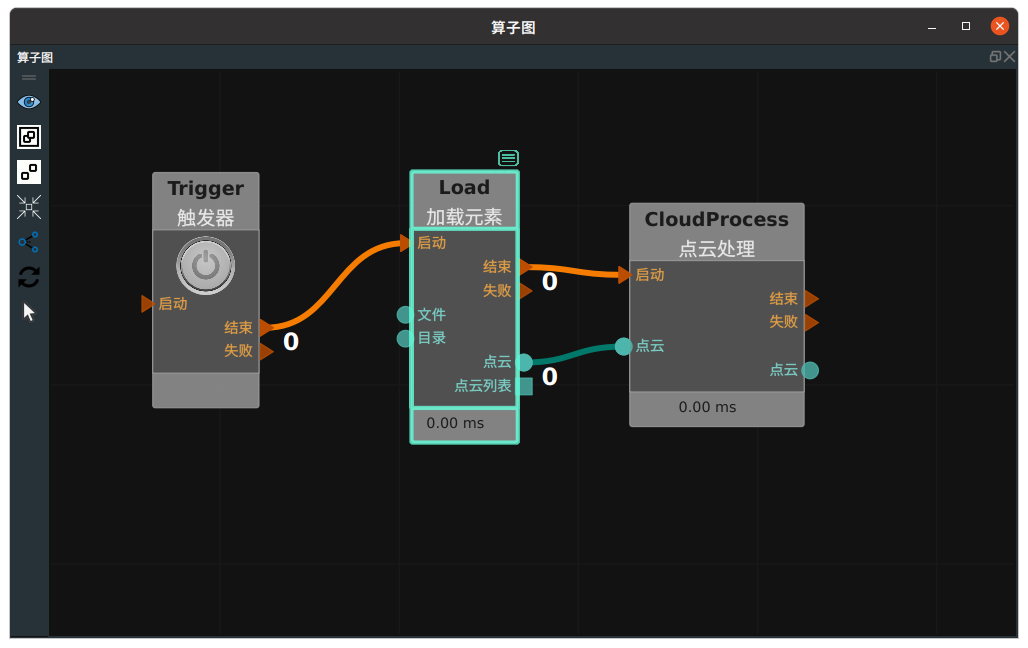
步骤3:连接算子
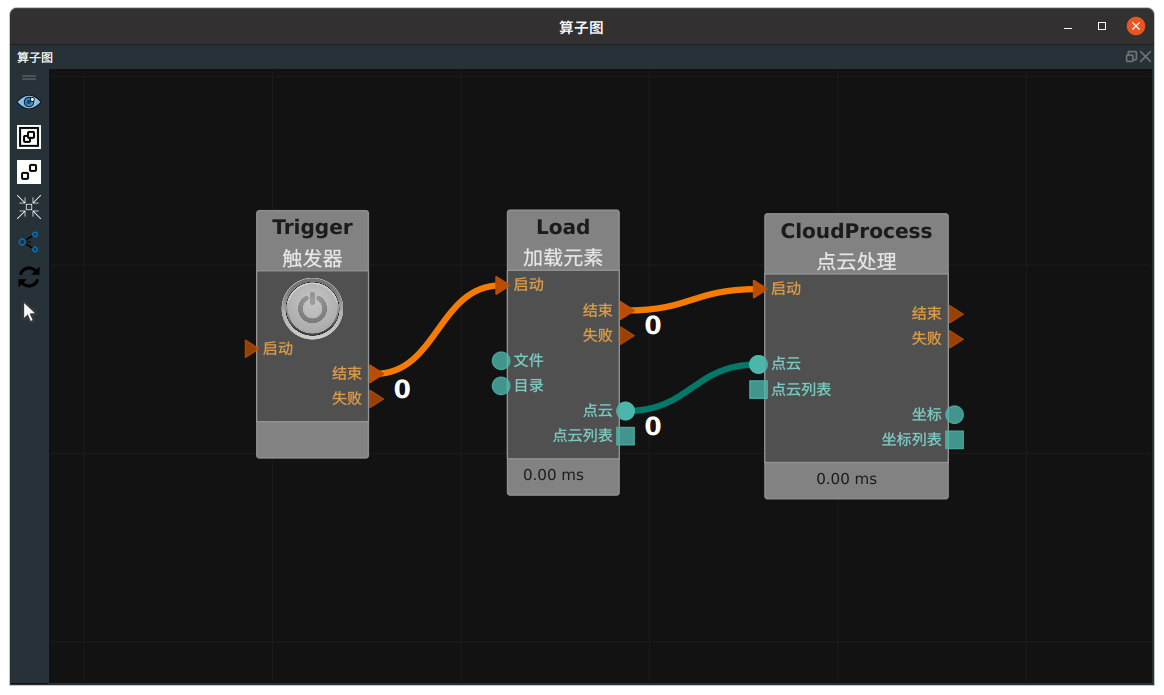
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
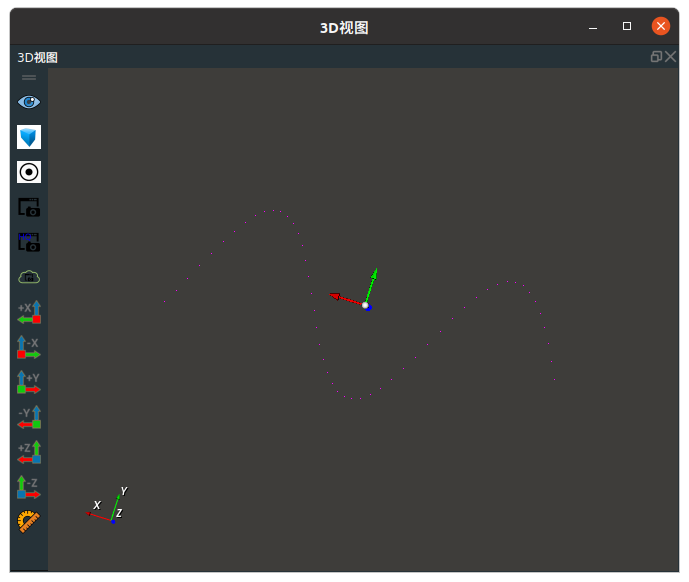
运行结果
如下图所示,在 3D 视图中显示加载的点云及其中心 pose 。
计算法向量
将 CloudProcess 点云处理 类型 设置为 计算法向量 ,用于求出点云相应的法向量。
搜索半径/search_radius:该属性表示点云中的点的半径,半径范围内,搜索到多个相邻点拟合出的平面的法向量即当前点的法向量。反转法线/flip_normals:法向量反转。True:反转点云法向量的朝向。
False :点云法向量的朝向正常。
点云/cloud:设置点云相应的法向量在 3D 视图中的可视化属性。- 打开点云相应的法向量可视化。
- 关闭点云相应的法向量可视化。
 设置3D视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
设置3D视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:点云数据
输出:
点云:数据类型:PointCloud
输出内容:点云数据及其法向量
功能演示
步骤1:算子准备
添加 Trigger 、Load 、CloudProcess 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/model.pcd )
设置 CloudProcess 算子参数:
类型 → 计算法向量
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
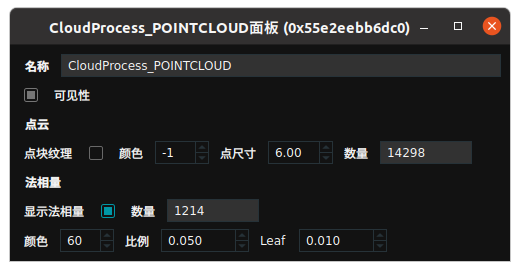
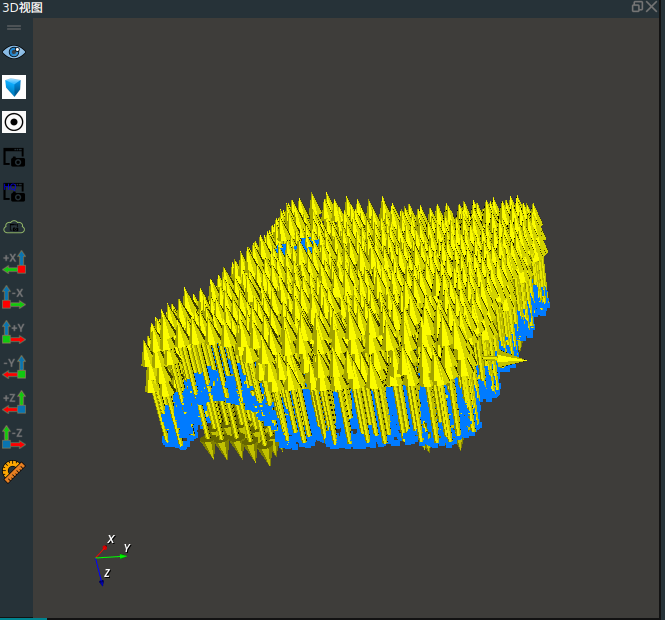
双击3D视图中的点云,显示 POINTCLOUD 面板,勾选“显示法向量”。
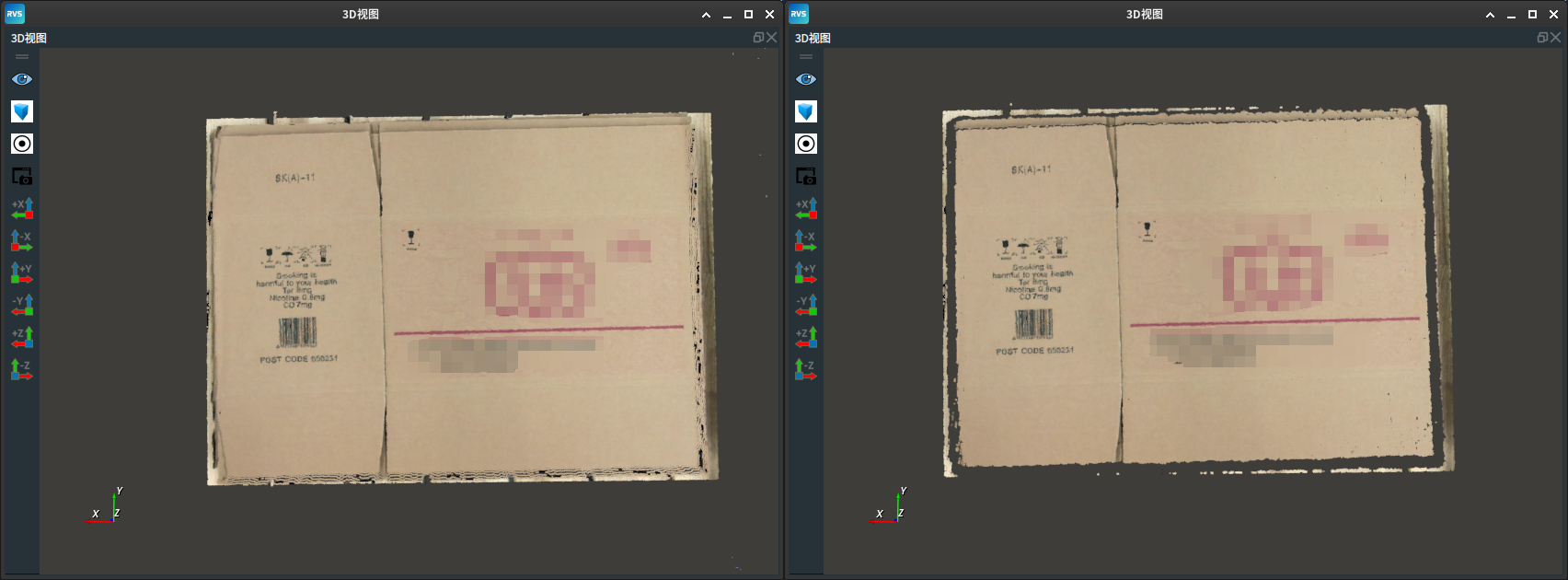
运行结果
如下图所示,在 3D 视图中显示加载的点云及其法向量。
合并点云
将 CloudProcess 点云处理 类型 设置为 合并点云 ,用于将多个点云合并为一个点云输出。
算子参数
输入数量/number_input:决定该算子的输入端口 cloud 的数量。取值范围:[0,10]。默认值:1。列表输入数量/number_input_list:决定该算子的输入端口 cloud_list 的数量。取值范围:[0,10]。默认值:0 。点云/cloud:设置合并后点云在 3D 视图中的可视化属性。- 打开合并后点云可视化。
- 关闭合并后点云可视化。
- 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
点云_0/1:数据类型:PointCloud
输入内容:点云数据
输出:
点云:数据类型:PointCloud
输出内容:合并后点云数据
功能演示
使用 CloudProcess 算子中 MergeCloud 将加载的两个点云合并成一个点云输出。
步骤1:算子准备
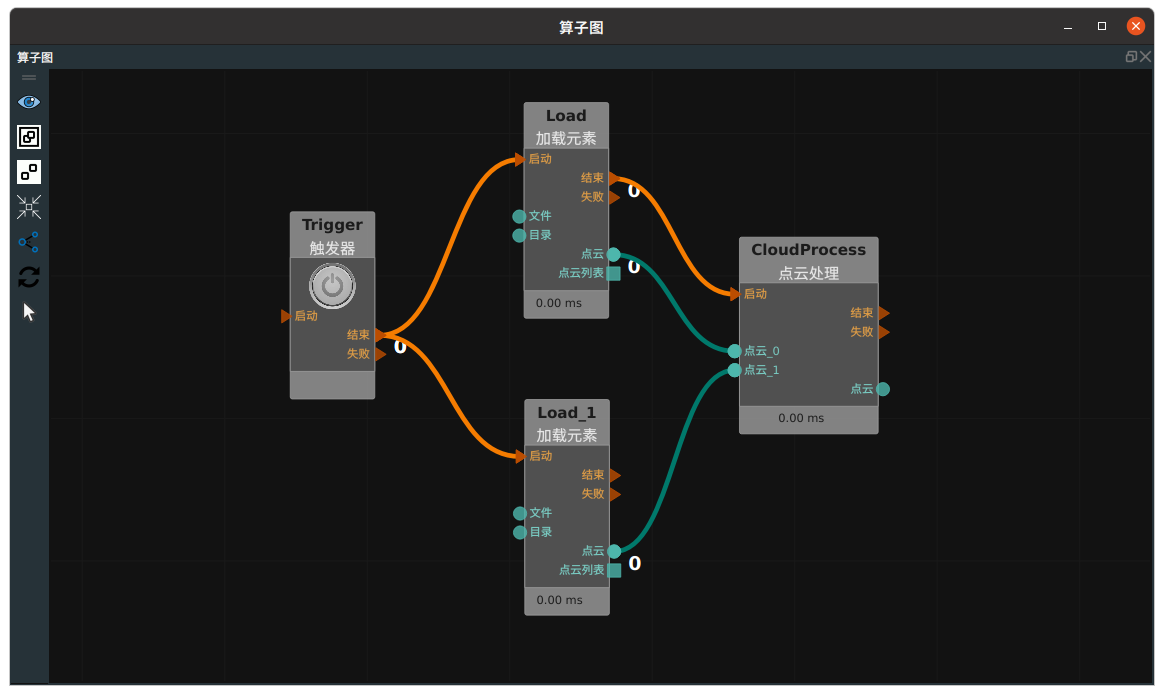
添加 Trigger、Load(2个)、 CloudProcess 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/wolf1.pcd )
设置 Load_1 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/wolf2.pcd )
设置 CloudProcess 算子参数:
类型 → 合并点云
文件 →
可视
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
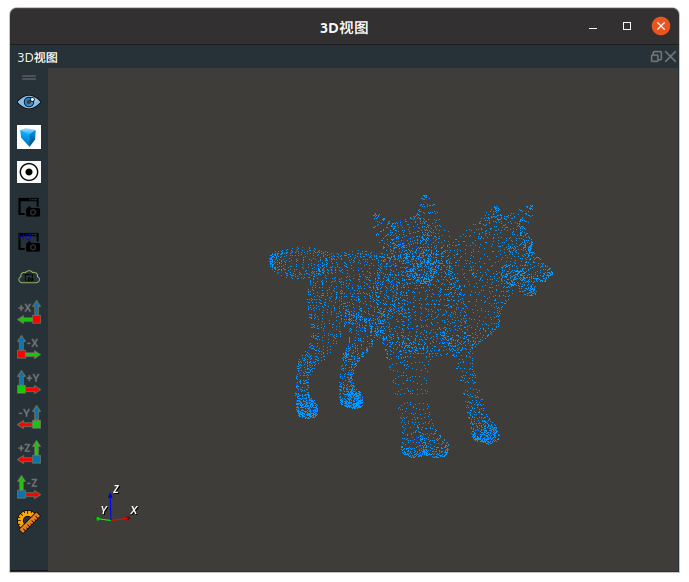
如下图所示,3D 视图中显示合并后的点云。
去除NaN值
将 CloudProcess 点云处理 类型 设置为 去除NaN值,用于去除 NAN 值。
算子参数
点云/cloud:设置去除NAN值后点云在 3D 视图的可视化属性。- 打开去除 NAN 值后点云可视化
- 关闭去除 NAN 值后点云可视化
- 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
点云列表/cloud_list:设置去除 NAN 值后点云列表的可视化属性。值描述与点云一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
点云:数据类型:PointCloud
输入内容:点云数据
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
输出:
点云:数据类型:PointCloud
输出内容:去除NAN值后点云数据
点云列表:数据类型:PointCloudList
输出内容:去除 NAN 值后点云列表数据
功能演示
步骤1:算子准备
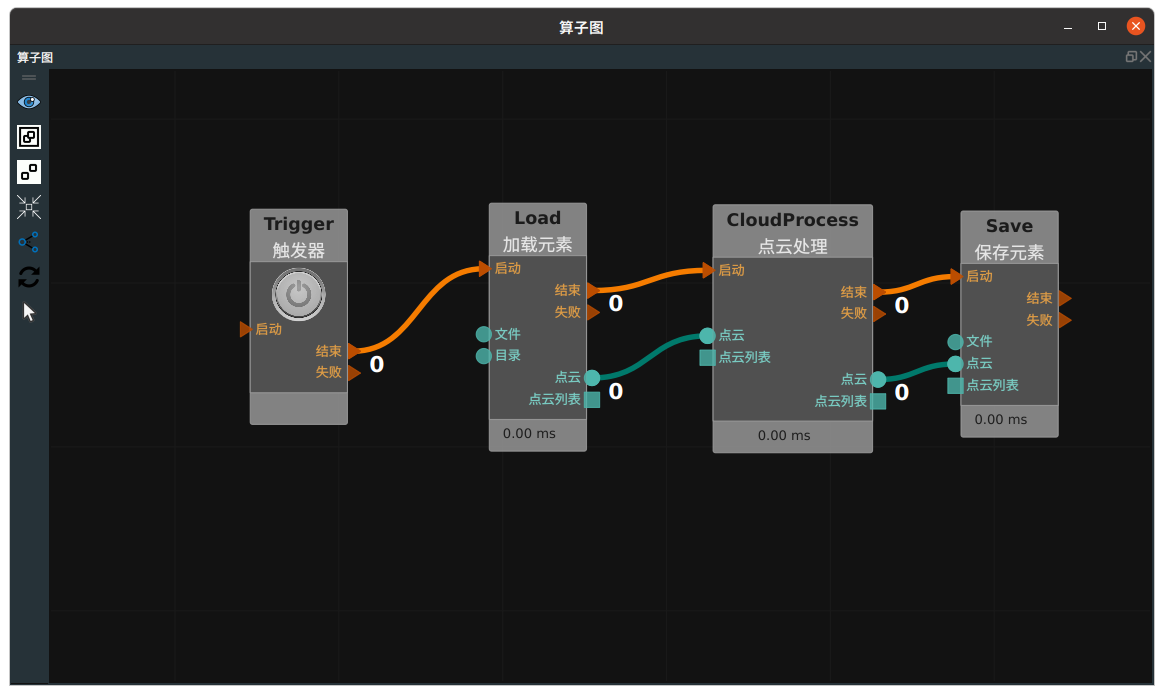
添加 Trigger 、Load、CloudProcess 、Save 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/pointcloud_ascii.pcd ) ,此点云为 ascii 形式。
设置 CloudProcess 算子参数:类型 → 去除NaN值
设置 Save 算子参数:
类型 → 点云
format → ascii
文件 → NAN_pointcloud_ascii.pcd
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。保存点云 NAN_pointcloud_ascii.pcd 。
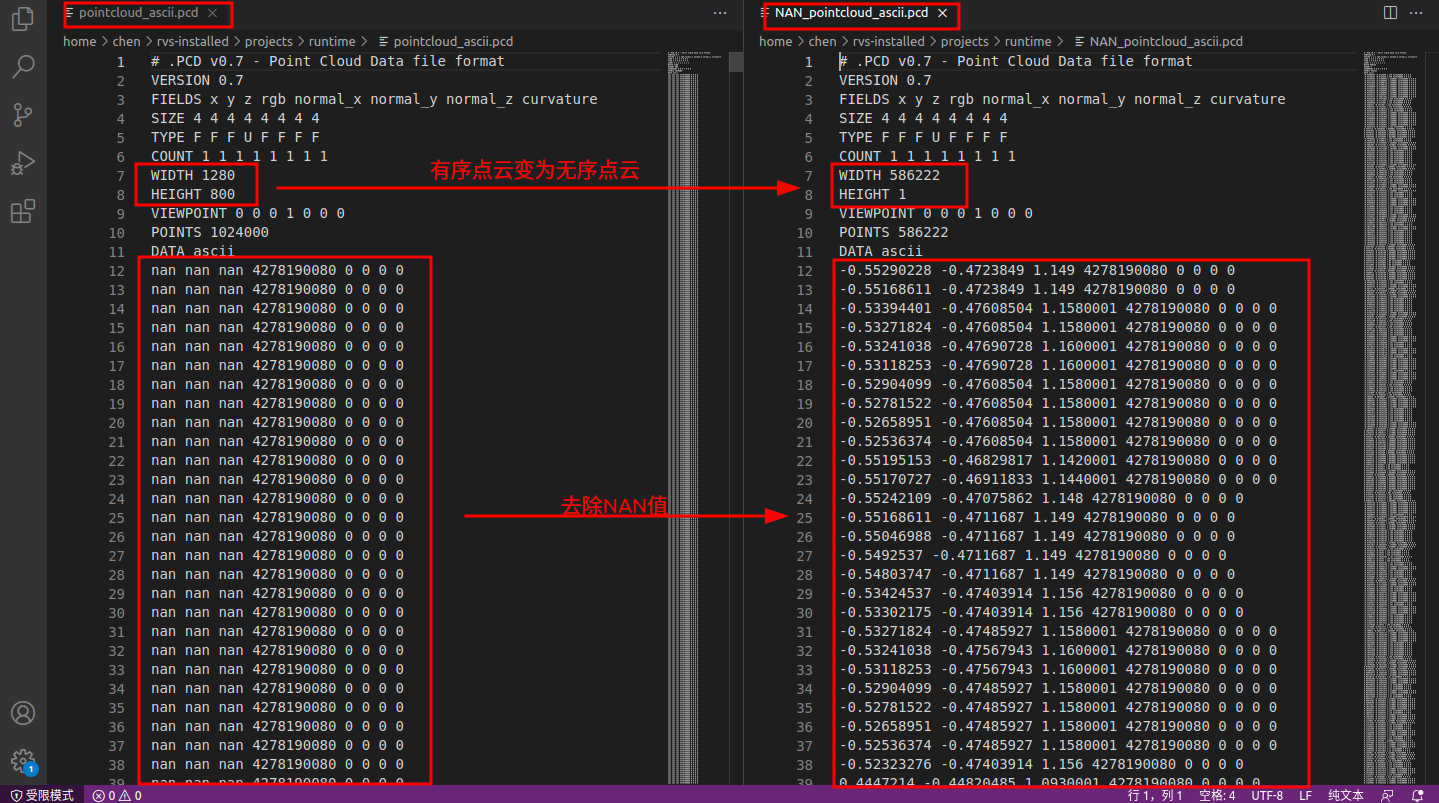
运行结果
使用 vscode 编辑器打开两个点云文件进行对比,会发现 NAN_pointcloud_ascii.pcd 点云文件中去除了 NAN 值,并且将有序点云变成了无序点云。
半径异常值删除
将 CloudProcess 点云处理 类型 设置为 半径异常值删除 ,用于半径滤波。对点云中的每一个点确定一个半径的邻域,若邻域范围内点数 < min_neighbors ,则认为该点为噪声点,并剔除。
算子参数
搜索半径/search_radius:以点云中的点为圆心设置半径。默认值:0.1 。单位:m。
注解
该属性值设置与点云的密度和单位有关。如果运行过程中出现算子卡死的情况,建议从小到大逐步调整该参数,并不断测试效果。
最小邻居数/min_neighbors:点半径范围内最少的邻近点。当小于该值时,剔除该点。点云/cloud:设置半径滤波后点云在3D视图中的可视化属性。- 打开半径滤波后点云可视化。
- 关闭半径滤波后点云可视化。
- 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:点云数据
输出:
点云:数据类型:PointCloud
输出内容:半径滤波后点云数据
功能演示
步骤1:算子准备
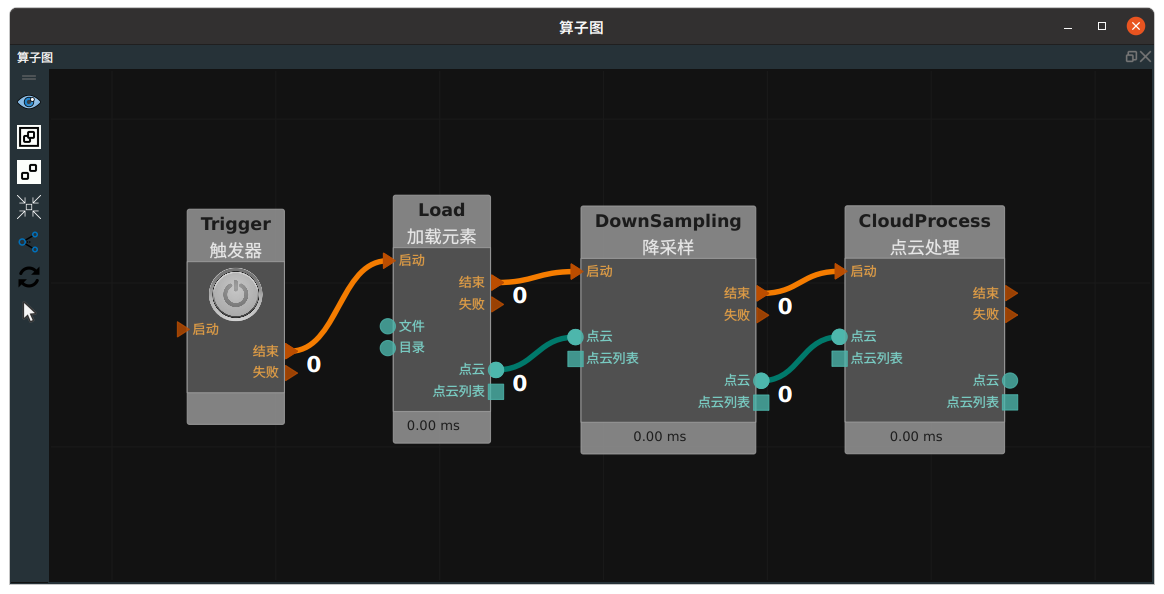
添加 Trigger 、Load 、DownSampling 、CloudProcess 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/ClusterExtraction_cloud.pcd )
设置 DownSampling 算子参数:
类型 → 网格降采样
x 方向采样 → 0.02
y 方向采样 → 0.02
z 方向采样 → 0.02
点云 →
可视
设置 CloudProcess算 子参数:
类型 → 半径异常值删除
搜索半径 → 0.05
最小邻居数 → 40
点云 →
可视
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
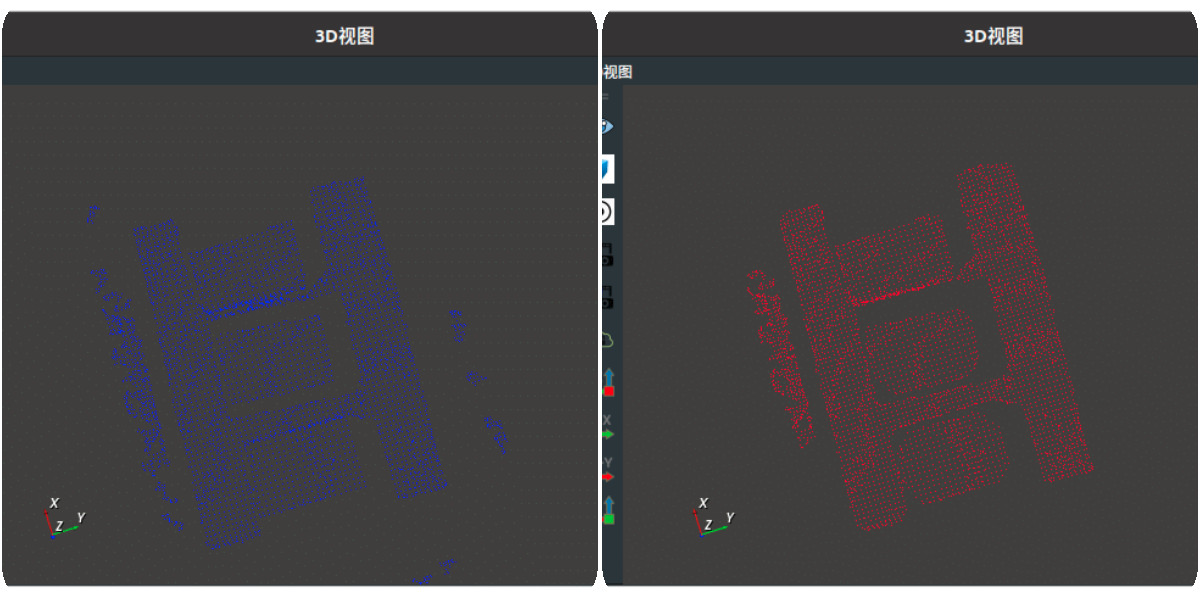
运行结果
如下图所示,3D 视图中,左图为 DownSampling 算子结果,右图为半径滤波后的结果。
统计异常值去除
将 CloudProcess 点云处理类型 设置为统计异常值去除,用于从点云数据集中移除离群点,即测量噪声点。通过计算点到临近点的平均距离分布,设置阈值,对不符合标准的点进行去除。
算子参数
最近邻近点数:用于计算每个点的平均距离的最近邻点的数量。如果最近邻近点数设置为 10,则每个点的平均距离将基于其最近的 10 个邻近点计算。标准偏差乘数:用于确定离群点的阈值。如果标准偏差乘数设置为 1.0,则离群点的阈值为平均距离加上 1 倍的标准偏差。点云:设置统计异常值去除点云在3D视图中的可视化属性。- 打开点云可视化。
- 关闭点云可视化。
- 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:点云数据
输出:
点云:数据类型:PointCloud
输出内容:统计异常值去除后点云数据
功能演示
使用 CloudProcess 中统计异常值去除,去除加载点云中噪声点。
步骤1:算子准备
添加 Trigger 、Load 、CloudProcess 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
→ 选择点云文件名( example_data/pointcloud/StatisticalOutlierRemoval_test.pcd )点云 →
可视 → -2
设置 CloudProcess 算子参数:
类型 → 统计异常值去除
最近邻近点数 → 5
标准偏差乘数 → 1
点云 →
可视→ -2
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,3D 视图中,左图为 Load 算子结果,右图为统计异常值去除后的结果。
法向量过滤
将 CloudProcess 点云处理 类型 设置为法向量过滤 ,计算点云中每个点的 NormalXYZ 与参考 NormalXYZ 的夹角,与最大最小阈值进行比较,选取符合条件的点云输出。
算子参数
参考法向量X:参考法向量的 X 分量。如果参考法向量 X 设置为 1.0,则参考法向量在 X 方向上的分量为 1.0。参考法向量Y:参考法向量的 Y 分量。参考法向量Z:参考法向量的 Z 分量。最小角度:点云法向量与参考法向量之间的最小夹角,单位为度。如果最小角度设置为 10.0,则过滤掉与参考法向量夹角小于 10 度的点。最大角度:点云法向量与参考法向量之间的最大夹角,单位为度。点云:设置法向量过滤点云在3D视图中的可视化属性。- 打开点云可视化。
- 关闭点云可视化。
- 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:点云数据
输出:
点云:数据类型:PointCloud
输出内容:法向量过滤后点云数据
参考法向量:数据类型:Pose
输出内容:参考法向量
功能演示
使用 CloudProcess 中法向量过滤,选取符合条件的点云输出。
步骤1:算子准备
添加 Trigger 、Load 、CloudProcess(2个)算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → PointCloud
文件 →
→ 选择点云文件名( example_data/pointcloud/StatisticalOutlierRemoval_test.pcd )点云 →
可视→ -2
设置 CloudProcess 算子参数:
类型 → 计算法向量
点云 →
可视
设置 CloudProcess_1 算子参数:
类型 → 法向量过滤
点云 →
可视→ -2参考法向量 →
可视
步骤3:连接算子
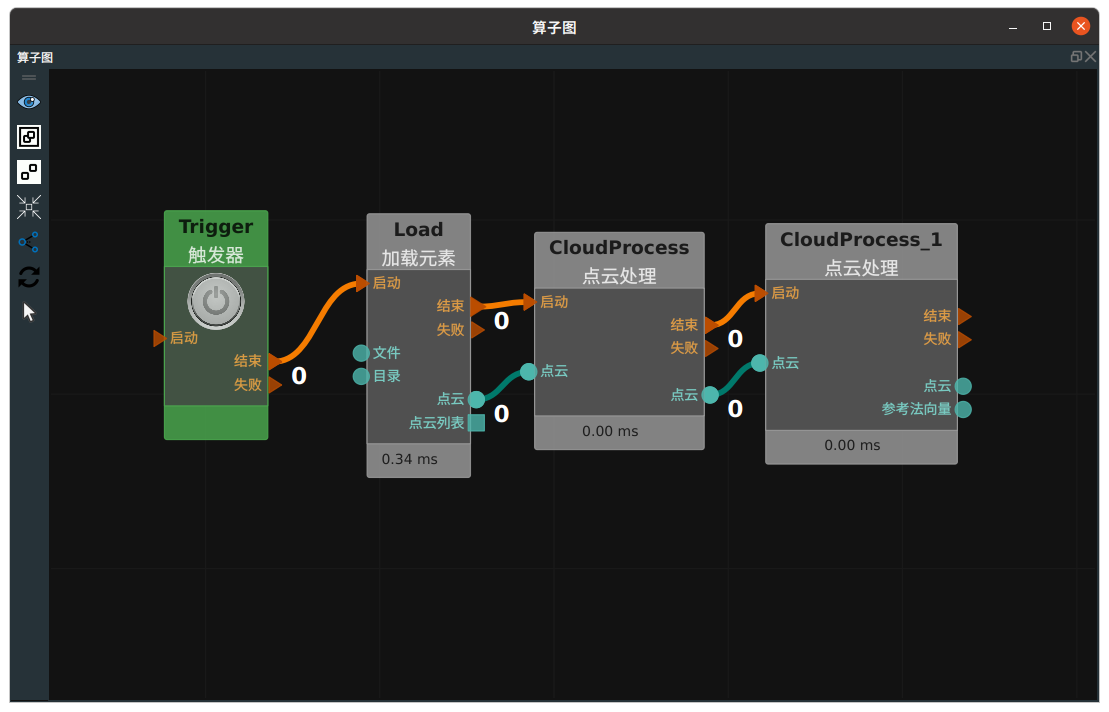
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
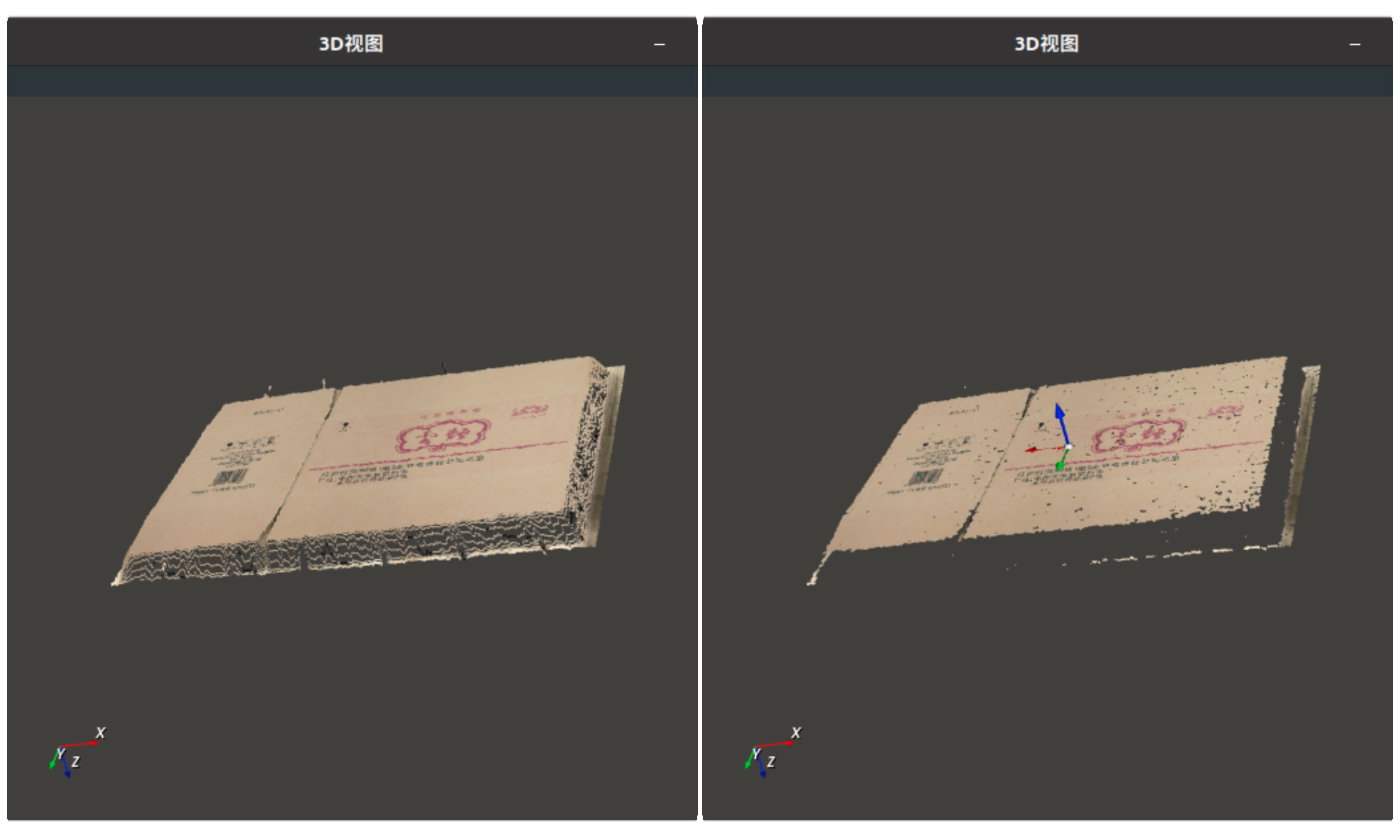
运行结果
如下图所示,3D 视图中,左图为 Load 算子结果,右图为法向量过滤后的结果。
解析点云
将 CloudProcess 点云处理 类型 设置为 解析点云 ,用于输出点云或者点云列表的物品类型。 通常用于查看 ai 推理后的物品类型。
算子参数
标签/label:设置点云标签的曝光属性。打开后可用与交互面板中输出工具文本框进行绑定。- 打开点云标签的曝光属性。
- 关闭点云标签的曝光属性。
标签列表/label_list:设置点云标签的曝光属性。打开后可用与交互面板中输出工具表格进行绑定。- 打开点云标签列表的曝光属性。
- 关闭点云标签列表的曝光属性。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:点云数据
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
输出:
标签:数据类型:String
输出内容:物品类型
标签列表:数据类型:StringList
输出内容:物品类型列表
索引:数据类型:String
输出内容:物品索引
索引列表:数据类型:StringList
输出内容:物品索引列表
功能演示
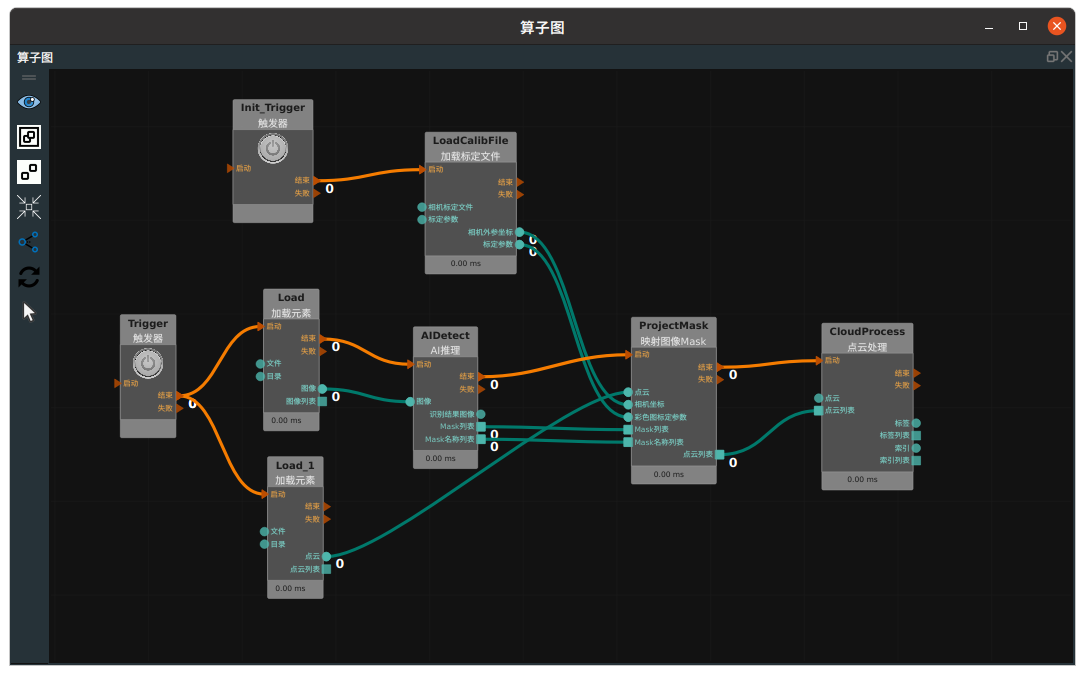
步骤1:算子准备
添加 Trigger( 2 个)、Load( 2 个)、LoadCalibFile、AIDetectGPU、ProjectMask、CloudProcess 算子至算子图
步骤2:设置算子参数
设置 Trigger_1 算子参数:
算子名称→初始化触发
类型 → InitTrigger
设置 Load 算子参数:
类型 → 图像
文件 →
 →选择图像文件名 (example_data/mask_data_train/20221010113840917/rgb.png )
→选择图像文件名 (example_data/mask_data_train/20221010113840917/rgb.png )图像 →
 可视
可视
设置 Load_1 算子参数:
类型 → 点云
文件 →
→ 选择与图像匹配点云文件名 (example_data/mask_data_train/20221010113840917/cloud.pcd )点云 →
可视
设置 LoadCalibFile 算子参数:
相机标定文件 → 图漾相机出厂标定文件 ( example_data/mask_data_train/mask_ty_color_calib.txt )
设置 AIDetect 算子参数:
说明
该端口连接/不连接,输出所有类别的旋转矩阵。连接时,可填写 select_class 来输出指定类别的旋转矩形。
类名文件路径 →
→ 选择相应文件名(example_data/mask_data_train/fruits.txt )权重文件路径 →
→ 选择相应权重文件名 (example_data/mask_data_train/train_output/model_final.pth )配置文件路径 →
→ 选择相应权重文件名 (example_data/mask_data_train/train_output/config.yaml )物体得分阈值 →
→ 0.75识别结果图像 →
可视
设置 ProjectMask 算子参数:
类型→ MaskList
点云列表 →
可视
设置 CloudProcess 算子参数:
类型 → 解析点云
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
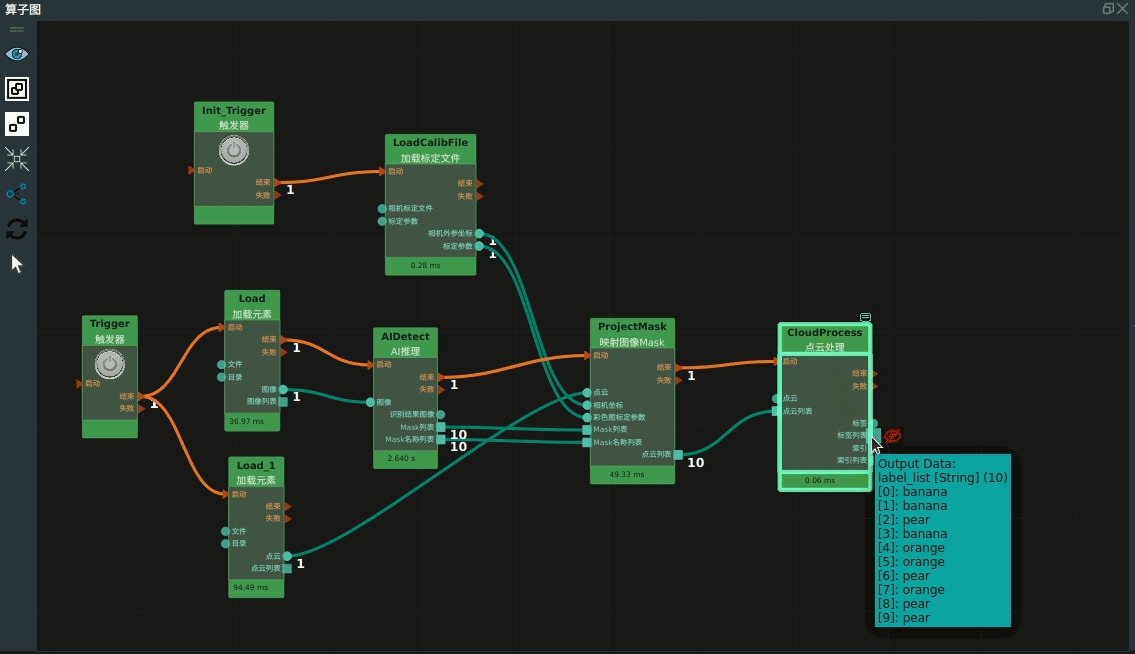
运行结果
如下图所示,鼠标放置 CloudProcess 算子 label_list 端口静置 1s ,显示推理所得的掩码图列表转换为 3D 点云列表的物品类型。
点云点数
将 CloudProcess 点云处理 类型 设置为 点云点数 ,用于输出点云的所有点数。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:点云数据
输出:
点云点数:数据类型:Matrix
输出内容:点云包含的点数
功能演示
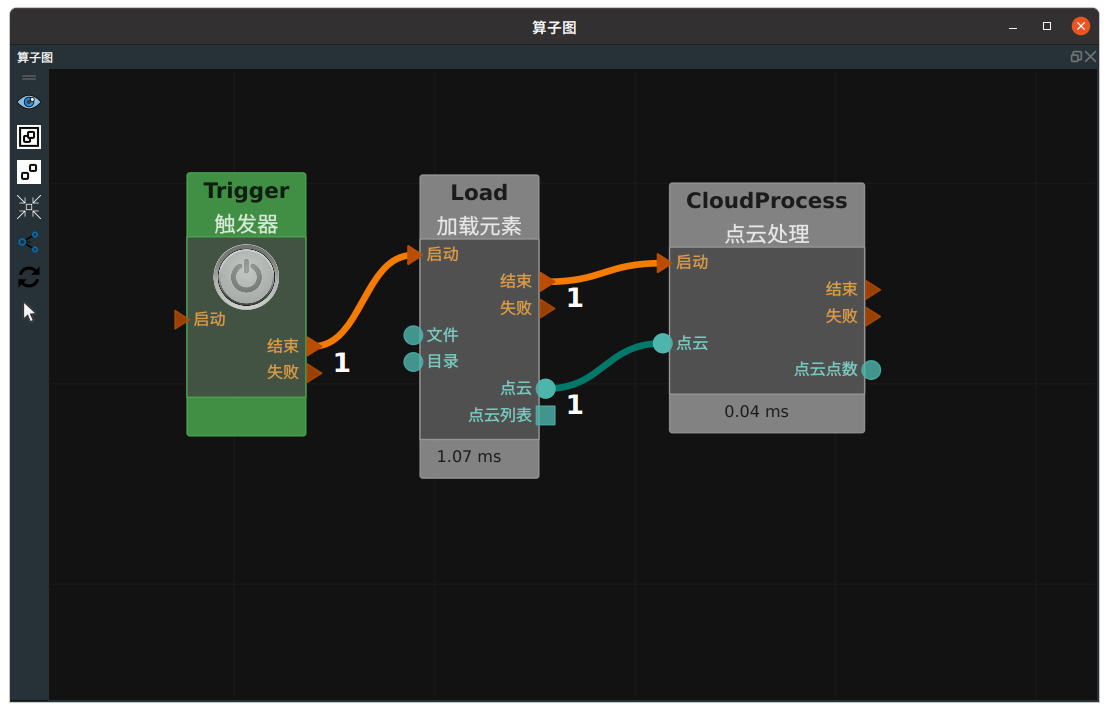
步骤1:算子准备
添加 Trigger、Load、CloudProcess 算子至算子图
步骤2:设置算子参数
设置 Load 算子参数:
类型→点云
文件 → 点云文件,pcd 格式。
设置 CloudProcess 算子参数:类型 → 点云点数
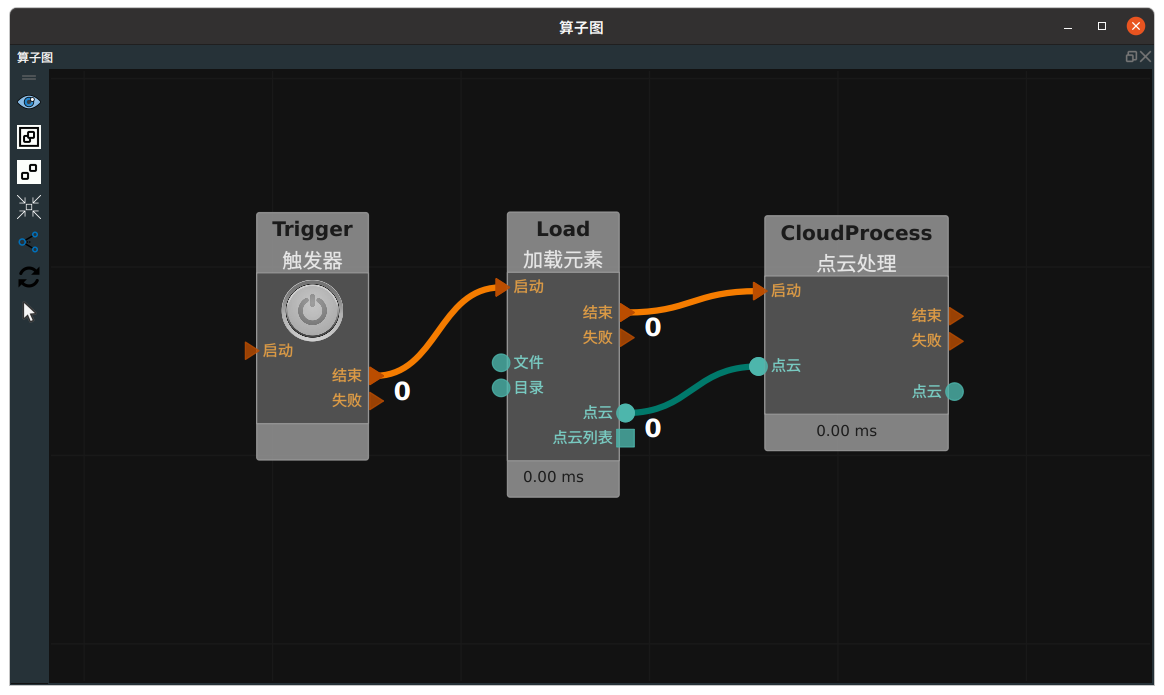
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
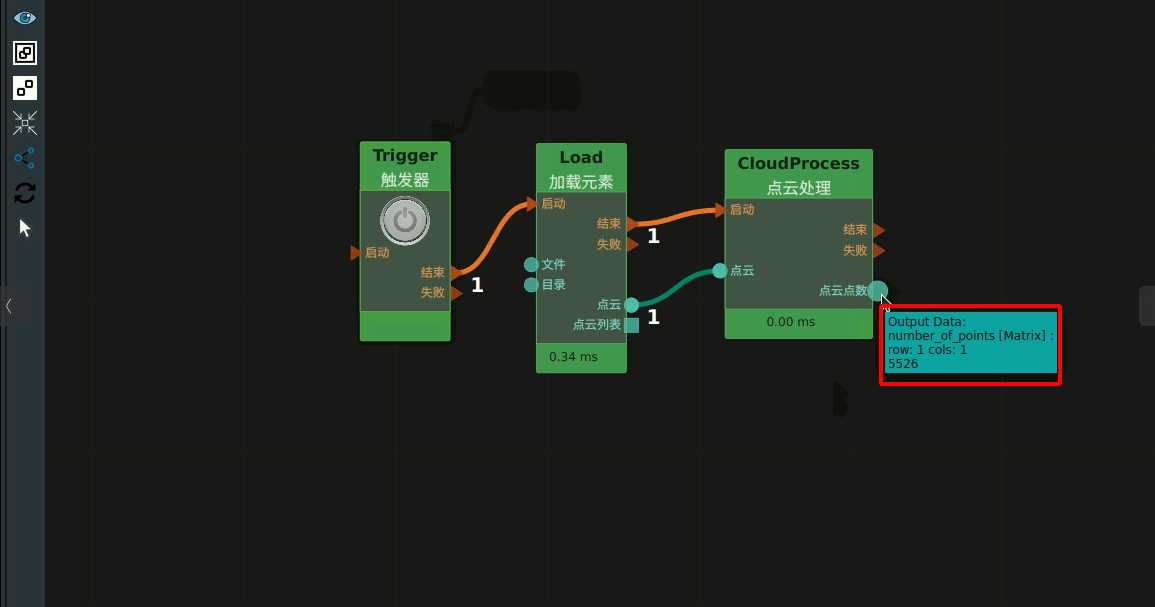
运行结果
如下图所示,鼠标放置 CloudProcess 算子点云点数端口静置 1s ,输出加载点云的点数。
计算空间高度
将 CloudProcess 点云处理 类型 设置为 计算空间高度 ,用于计算点云数据中的高度信息。
算子参数
模式:根据指定模式输出 Z 值。最大值:计算点云数据中的最大高度值。
最小值:计算点云数据中的最小高度值。
均值:计算点云数据中的平均高度值。
最小点数:指定计算高度时所需的最小点数。如果点云数据中的点数少于此值,则不进行计算。头部切除比例:指定在计算高度时,按 Z 轴值高度从低到高排序后,切除的Z轴最高部分点的比例。取值范围:[0~1]。例如,设置为 0.1 表示切除最高的 10% 的点。尾部切除比例:指定在计算高度时,按 Z 轴值从低到高排序后,切除的 Z 轴最低部分点的比例。取值范围:[0~1]。例如,设置为 0.1 表示切除最低的 10% 的点。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:点云数据
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
输出:
max_value:数据类型:Matrix
输出内容:高度值
功能演示
使用
步骤1:算子准备
添加 Trigger、Load、CloudProcess 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型→点云
文件 → 点云文件,pcd 格式(example_data/pointcloud/plane.pcd)
设置 CloudProcess 算子参数:
类型 → 计算空间高度
模式 → 最大值
头部切除比例 → 0.5
尾部切除比例 → 0.1
步骤3:连接算子
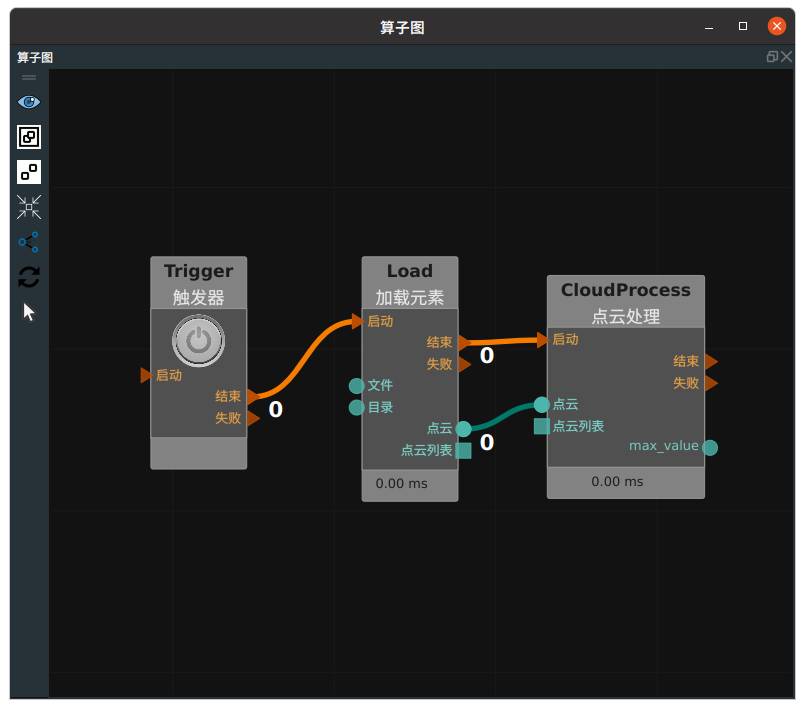
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
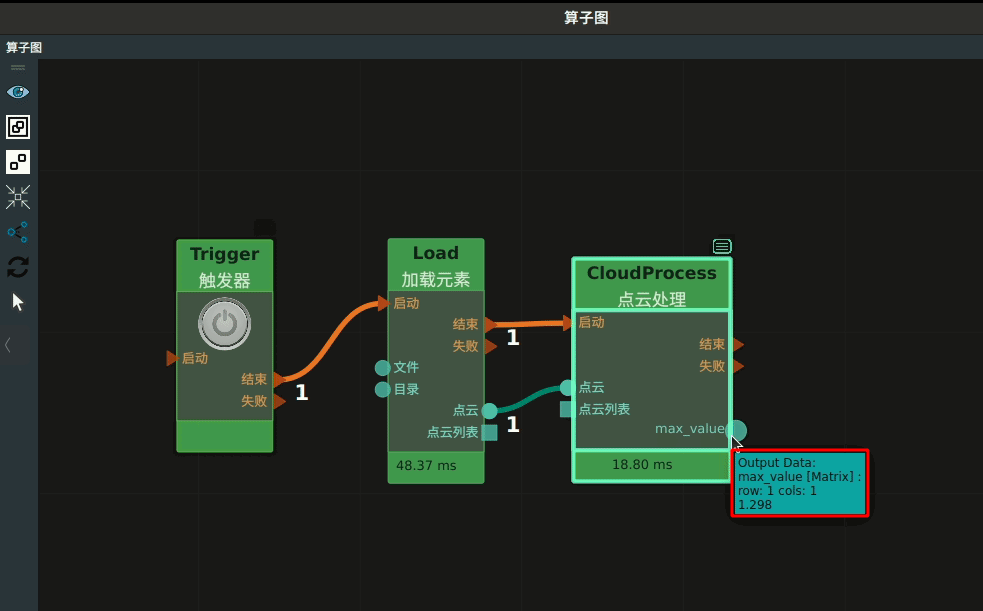
运行结果
如下图所示,鼠标放置 CloudProcess 算子max_value端口静置 1s ,输出加载点云的高度信息。