ScalePose 修改坐标比例
ScalePose 算子用于调整坐标比例,分为 Normal 和 Flexible 两种。RVS X Y Z 默认单位:m。 RX RY RZ 默认单位:弧度制。
| type | 功能 |
|---|---|
| Normal | 分别调整 pose 的(X、Y 、Z)和(RX、RY、RZ)的比例。 |
| Flexible | 单独调整 pose 的 X、Y 、Z、RX、RY、RZ 比例。 |
Normal
将 ScalePose 算子的 类型 设置为 Normal ,分别调整 pose 的( X 、Y 、Z )和( RX、RY、RZ )比例。
算子参数
XYZ比例/scale_xyz:修改 pose 的 x y z 的单位。输入数值后,x y z 与该数值相乘。默认值:0.001 。表示将毫米切换为米。反之设:1000 。即从米切换为毫米。RPY比例/scale_rpy:修改 pose 中 Roll Pitch Yaw 的单位。输入数值后,Roll Pitch Yaw 与该数值相乘。默认值:0.01745329 。表示将角度切换为弧度。反之设:57.2957795 。即从将弧度切换为角度。坐标/pose:设置调整比例后的 pose 在 3D 视图中的可视化属性。 打开 pose 可视化。
打开 pose 可视化。 关闭 pose 可视化。
关闭 pose 可视化。 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
坐标列表/pose_list:设置调整比例后的 pose 列表在 3D 视图中的可视化属性。值描述与 pose 一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:pose 数据
pose_list:数据类型:PoseList
输入内容:pose 列表数据
输出:
pose:数据类型:Pose
输出内容:调整比例后的 pose 数据
pose_list:数据类型:PoseList
输出内容:调整比例后的 pose 列表数据
功能演示
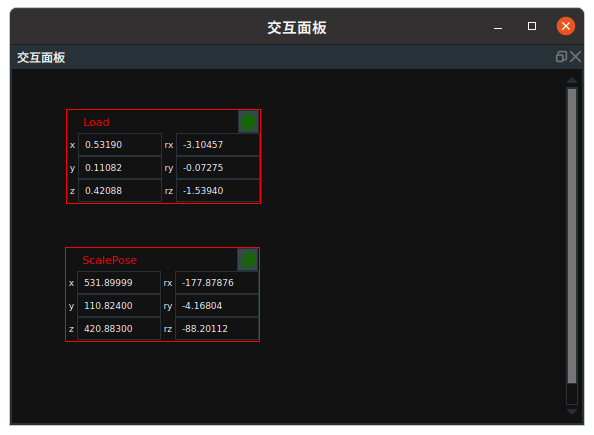
使用ScalePose 中 Normal 将加载的 pose 中 x y z 从米切换为毫米, RX、RY、RZ 将弧度切换为角度。
步骤1:算子准备
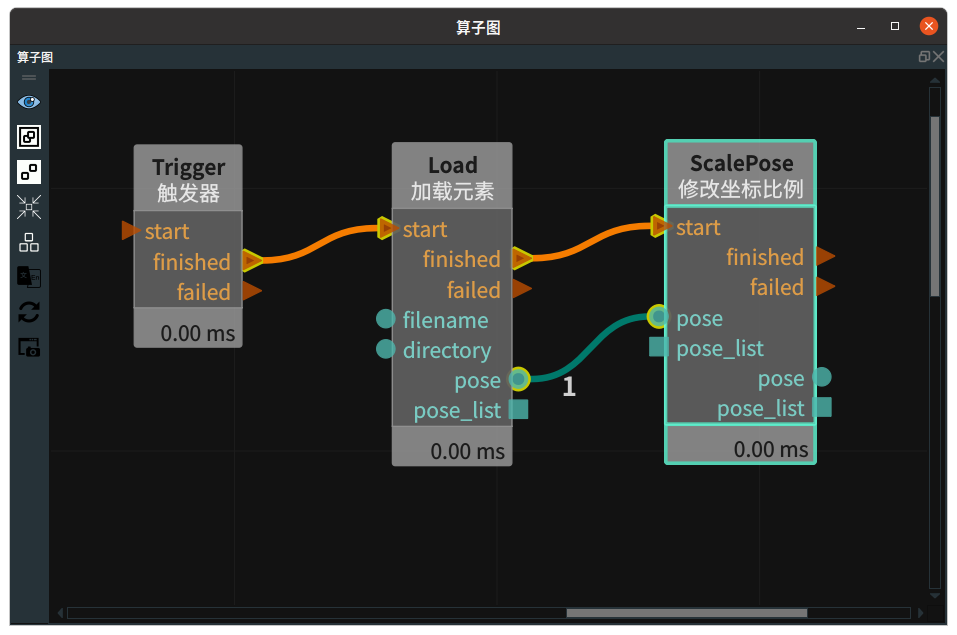
添加 Trigger 、Load 、ScalePose 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → pose
文件 →
 → 选择 pose 文件名( example_data/pose/tcp.txt )
→ 选择 pose 文件名( example_data/pose/tcp.txt )坐标 →
可视
设置 ScalePose 算子参数:
类型 → Normal
XYZ比例 → 1000
RPY比例 → 57.29578015
坐标 →
可视
步骤3:连接算子
步骤4:运行
分别将两个可视化属性与交互面板——“坐标输出”属性进行绑定。
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
结果如下图所示,在交互面板中分别显示修改比例前后的坐标。pose 的 x y z 从米切换为毫米, RX、RY、RZ 将弧度切换为角度。
Flexible
将 ScalePose 算子的 类型 设置为 Flexible ,单独调整 pose 的X 、Y 、Z 、RX、RY、RZ 比例。
算子参数
X比例/scale_x:修改 pose 中 x 的比例。输入数值后,x 与该数值相乘。默认值:1。Y比例/scale_y:修改 pose 中 y 的比例。输入数值后,y 与该数值相乘。默认值:1。Z比例/scale_z:修改 pose 中 z 的比例。输入数值后,z 与该数值相乘。默认值:1。RX比例/scale_rx:修改 pose 中 rx 的比例。输入数值后,rx 与该数值相乘。默认值:1。RY比例/scale_ry:修改 pose 中 ry 的比例。输入数值后,ry 与该数值相乘。默认值:1。RZ比例/scale_rz:修改 pose 中 rz 的比例。输入数值后,rz 与该数值相乘。默认值:1。坐标/pose:设置调整比例后的 pose 在 3D 视图中的可视化属性。- 打开 pose 可视化。
- 关闭 pose 可视化。
- 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
坐标列表/pose_list:设置调整比例后的 pose 列表在 3D 视图中的可视化属性。值描述与坐标一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:pose 数据
pose_list:数据类型:PoseList
输入内容:pose 列表数据
输出:
pose:数据类型:Pose
输出内容:调整比例后的 pose 数据
pose_list:数据类型:PoseList
输出内容:调整比例后的 pose 列表数据
功能演示
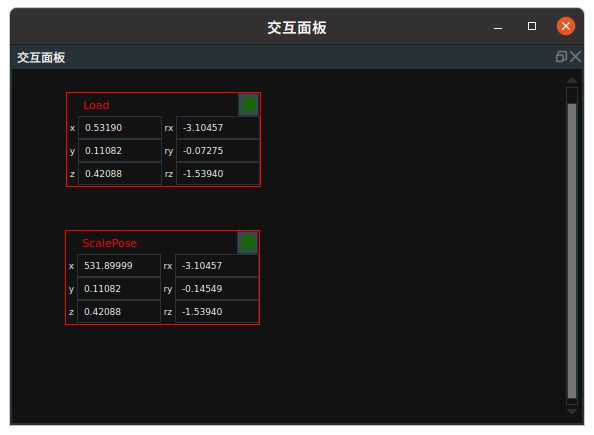
使用 ScalePose 中 Flexible 将加载的 pose 中 x 从米切换为毫米 。
步骤1:算子准备
添加 Trigger、Load 、ScalePose 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → pose
文件 →
→ 选择 pose 文件名( example_data/pose/tcp.txt )坐标 →
可视
设置 ScalePose 算子参数:
类型 → Flexible
X比例 → 1000
坐标 →
可视
步骤3:连接算子
步骤4:运行
分别将两个可视化属性与交互面板——“坐标输出”属性进行绑定。
点击 运行按钮,触发 Trigger 算子。
运行结果
结果如下图所示,在交互面板中分别显示修改比例前后的坐标。pose 中 x 从米切换为毫米。