Parameter Descriptions
This section will provide a detailed introduction to all image tuning function parameters supported by the Percipio Viewer, to better understand and use the software.
Device
The following are the settings descriptions for each attribute under the depth camera device components.
Flash Light
This feature is used to assist with the online dynamic calibration of the camera.
When both the Left IR Stream and Right IR Stream are ![]() , select flash light enable and set the flash light intensity according to actual needs.
, select flash light enable and set the flash light intensity according to actual needs.
Comparison before and after using the flash light feature:
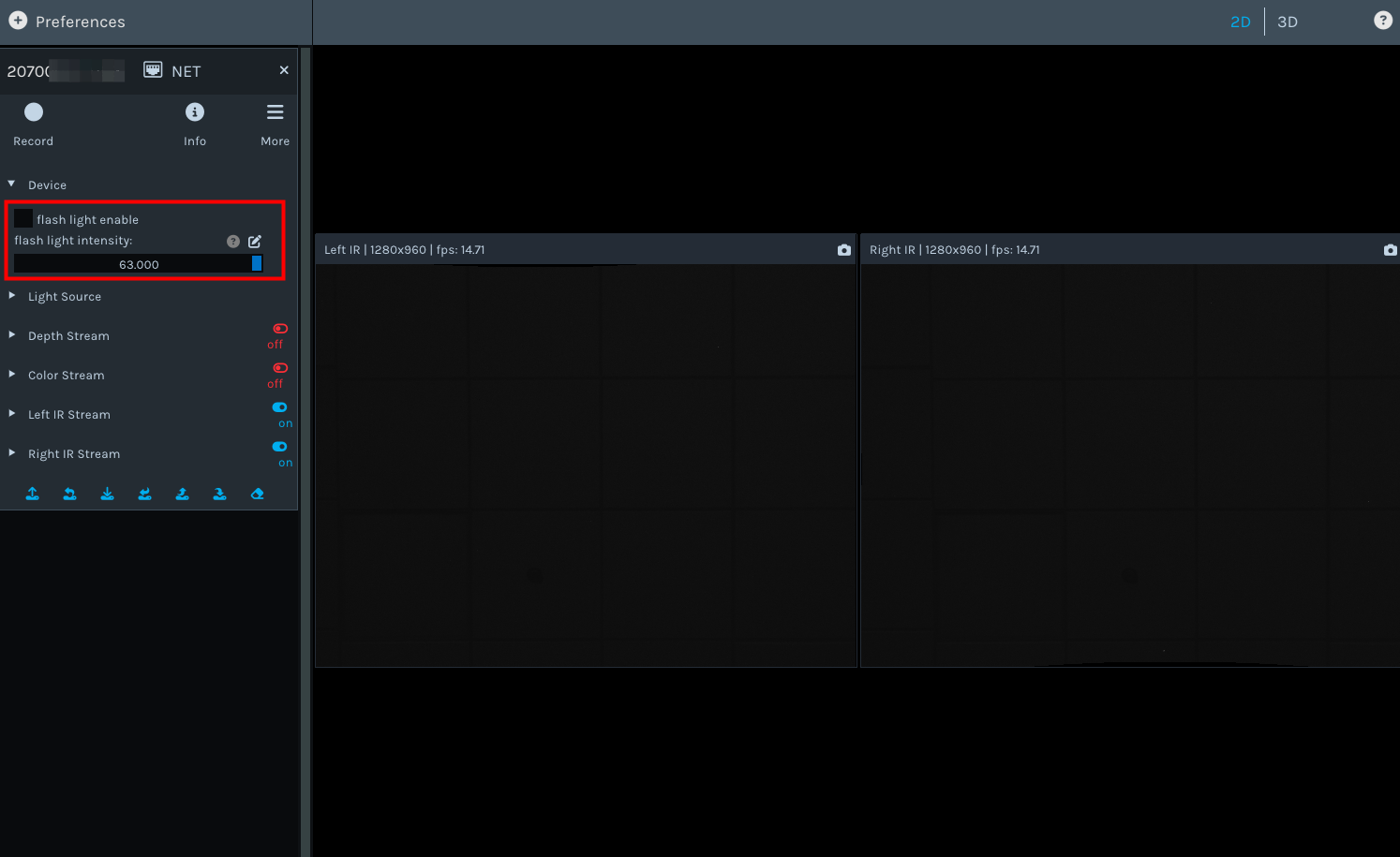
Flash Light Disabled
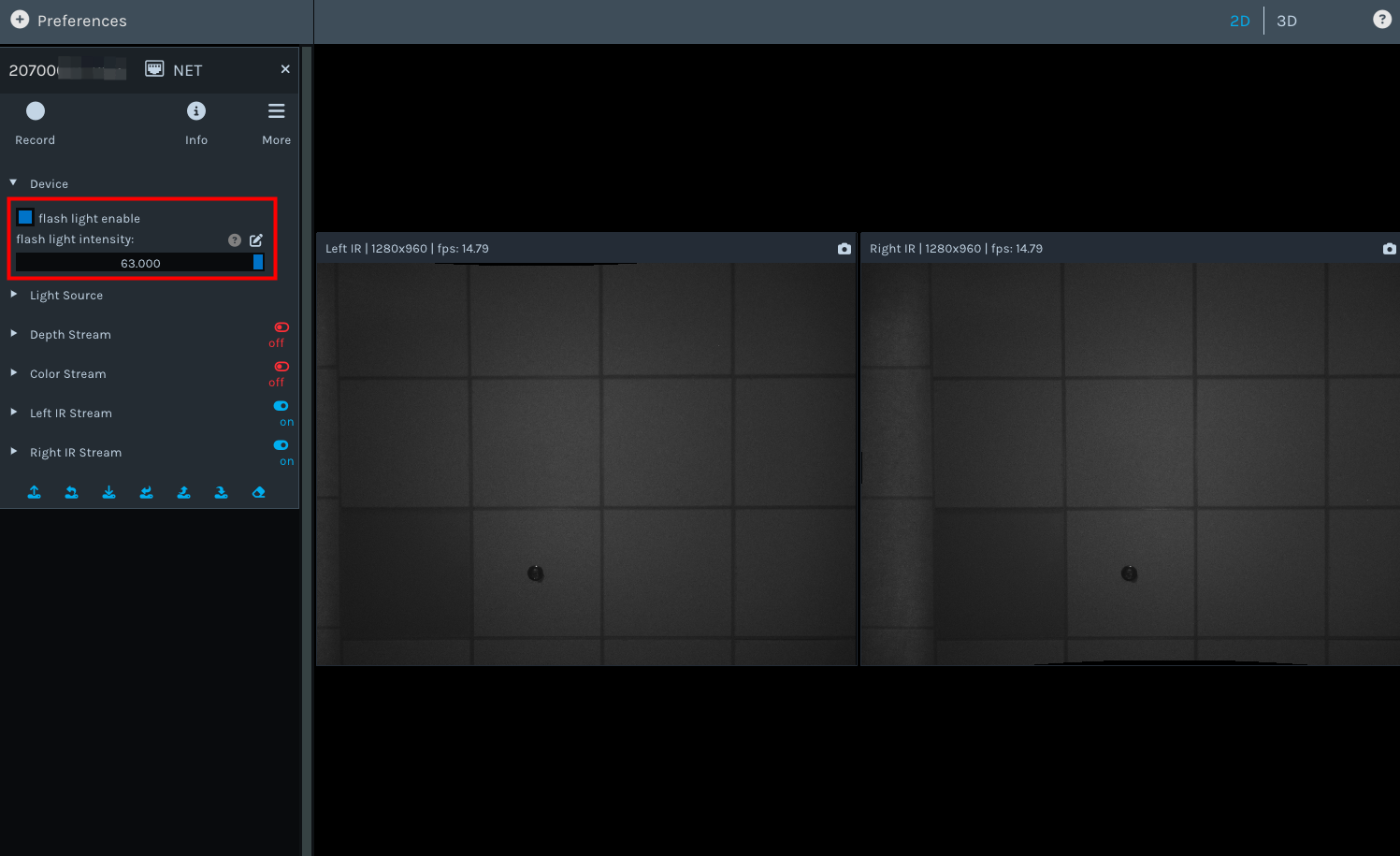
Flash Light Enabled
Light Source
The following are the functions used for tuning the camera light source.
Auto Ctrl/Power
This section of parameters is mainly used to switch the laser on and off and adjust the brightness of the laser.
When all data streams are ![]() , set auto ctrl according to actual needs, and then turn on the data streams.
power is used to set the laser brightness; the larger the set value, the brighter the laser.
, set auto ctrl according to actual needs, and then turn on the data streams.
power is used to set the laser brightness; the larger the set value, the brighter the laser.
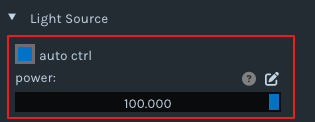
Light Source Power
Note
The rules for enabling and disabling the camera laser can be found in the section: Laser setup.
Controls
The following are the image tuning functions for depth maps, color images, and grayscale images, divided into four main modules: SGBM Parameters, ToF Related Parameters, Gain and Exposure Related Parameters, and Undistort Parameters. Each parameter can be adjusted flexibly according to actual needs to optimize image effects.
SGBM Parameters
Adjust SGBM parameters in real-time based on the depth map to optimize the camera’s ranging, accuracy, frame rate and depth map post-processing. Some cameras support SGBM parameters.
Edge Smoothing Parameters
semi global param p1
Sets the penalty parameter P1 for disparity changes between neighboring pixels (+/-1).
The larger the value, the smoother the depth map.
Prevents discontinuities or unreasonable depth values, effectively suppressing noise and discontinuities.
semi global param p1 scale
Sets the scaling factor for the penalty parameter P1 for disparity changes between neighboring pixels (+/-1).
The smaller the value, the smoother the depth map.
semi global param p2
Sets the penalty parameter P2 for disparity changes between surrounding pixels.
The larger the value, the smoother the depth map. P2 > P1.
This parameter effectively handles texture-rich areas, reducing the number of mismatches.
enable half window size
Search filter switch.
Further optimizes the depth map, removing noise and discontinuities, and making the point cloud at object edges more accurate.
Median Filter
enable median filter
Eliminate isolated noise points while preserving edge information as much as possible.
After clicking enable median filter, adjust the parameter median filter thresh.
The larger the value set for median filter thresh, the more noise points will be filtered out, but it may also result in the loss of fine details in the depth map.
ToF Related Parameters
The following are image tuning functions specific to the ToF series. These settings can only be configured in the interface when the ToF series camera is opened with Percipio Viewer.

ToF Series Image Tuning Functions
Depth Quality
Sets the quality of the depth map output by the camera to meet the needs of different applications.
When all data streams are ![]() , set the depth quality according to actual needs, and then turn on the data streams.
, set the depth quality according to actual needs, and then turn on the data streams.
basic: Large depth value jitter, high output frame rate.
medium: Moderate depth value jitter, moderate output frame rate.
high: Small depth value jitter, low output frame rate.

depth quality basic
depth quality medium
depth quality high
ToF Channel
Sets the modulation channel of the ToF depth camera. Different modulation channels have different modulation frequencies and do not interfere with each other.
When all data streams are ![]() , set the tof channel to ensure that the modulation channels of the same series of ToF cameras in the same scene are different.
, set the tof channel to ensure that the modulation channels of the same series of ToF cameras in the same scene are different.
ToF Modulation Threshold
Sets the threshold for the laser modulation intensity received by the ToF depth camera. Pixels with intensity below this threshold will not participate in depth calculation, and their depth values will be set to 0.
When the Depth Stream is ![]() , adjust the tof modulation threshold in real-time according to the depth map.
, adjust the tof modulation threshold in real-time according to the depth map.
ToF Jitter Threshold
Sets the jitter filtering threshold of the ToF depth camera. The larger the threshold value, the less the depth data at the edges of the depth map will be filtered.
When the Depth Stream is ![]() , adjust the tof jitter threshold in real-time according to the depth map to filter out jittering pixels at the edges.
, adjust the tof jitter threshold in real-time according to the depth map to filter out jittering pixels at the edges.
Filter Threshold
Sets the flying pixel filtering threshold of the ToF depth camera. The smaller the filtering threshold, the more flying pixels will be filtered out.
When the Depth Stream is ![]() , adjust the filter threshold in real-time according to the depth map to filter out flying pixels.
, adjust the filter threshold in real-time according to the depth map to filter out flying pixels.
HDR Ratio
Optimizes the depth imaging effect in high-contrast scenes. It is supported by TL460-S1-E1 and TL430-E1 in the ToF series.
Steps to set HDR Ratio:
When all data streams are
 . Set the depth quality to high.
. Set the depth quality to high.When Depth Stream is
 , adjust the HDR ratio in real-time according to the depth map.
, adjust the HDR ratio in real-time according to the depth map.
ToF Anti-sunlight Index
Optimizes the depth imaging effect of the ToF camera under sunlight. It is supported only by TM260-E2 in the ToF series.
When all data streams are ![]() , adjust the tof anti-sunlight index.
, adjust the tof anti-sunlight index.
In indoor scenes or under weak sunlight, it is recommended to set the index to 0; in outdoor scenes or under some sunlight, set it to 1 or 2.
Max Speckle Size/Diff
Only the TM260-E2 in the ToF series supports the Max speckle diff and Max speckle size functions.
Processes speckles in ToF camera depth maps. If the depth difference between adjacent pixels is less than the Max speckle diff clustering threshold, the adjacent pixels belong to the same speckle cluster. Speckle clusters with an area smaller than the Max speckle size threshold will be filtered out.
When the Depth Stream is ![]() , adjust the max speckle size in real-time based on the depth map. The larger the area threshold, the more speckle clusters will be filtered out.
, adjust the max speckle size in real-time based on the depth map. The larger the area threshold, the more speckle clusters will be filtered out.
When the Depth Stream is ![]() , adjust the max speckle diff in real-time based on the depth map. The larger the clustering threshold, the more adjacent pixels will belong to the same speckle cluster.
, adjust the max speckle diff in real-time based on the depth map. The larger the clustering threshold, the more adjacent pixels will belong to the same speckle cluster.
ToF Anti-interference
Only the TM260-E2 in the ToF series supports the ToF Anti-interference function.
Filters out abnormal depth values caused by signal interference when multiple cameras coexist in the same scene and are on the same modulation channel (ToF Channel), as shown in the figure below.
Multimachine Interference
When the Depth Stream is ![]() , check the box for tof anti-interference.
, check the box for tof anti-interference.
ToF Anti-interference
Gain and Exposure Related Parameters
Adjusts the exposure, brightness level, and dynamic range for color and grayscale images.
Gain/Analog Gain
Adjusts the gain of the image sensor, optimizes image quality, balances brightness and detail, and reduces noise.
When the Color Stream or Left/Right IR Stream is ![]() , set the gain/analog gain in real-time according to the image. The higher the set value, the higher the image brightness, but the noise will also increase.
, set the gain/analog gain in real-time according to the image. The higher the set value, the higher the image brightness, but the noise will also increase.
Exposure Time
Controls the exposure time of the image sensor, thereby affecting the brightness and clarity of the image., thereby affecting the brightness and clarity of the image.
When the Color Stream or Left/Right IR Stream is ![]() , set the exposure time in real-time according to the image. The higher the set value, the higher the image brightness.
, set the exposure time in real-time according to the image. The higher the set value, the higher the image brightness.
Note
Simultaneously adjust the gain, analog gain, and exposure time parameters for both the Left IR and Right IR to ensure that the generated depth map has good quality.
R/G/B Gain
Adjusts the intensity of the red, green, and blue channels in the image to achieve color balance and correction.
When the Color Stream is ![]() , adjust the parameters in real-time according to the color image.
The higher the r gain value, the redder the color image. The higher the g gain value, the greener the color image. The higher the b gain value, the bluer the color image.
, adjust the parameters in real-time according to the color image.
The higher the r gain value, the redder the color image. The higher the g gain value, the greener the color image. The higher the b gain value, the bluer the color image.
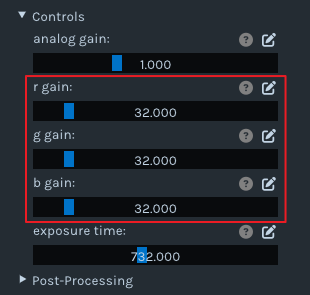
r/g/b gain
Note
To set the gain for the r, g, and b channels, you need to first turn off the RgbAWB (automatic white balance) function. Otherwise, the automatic white balance function will conflict with the manually set r, g, and b channel gains, affecting the image quality.
AETargetLuminance
Optimizes the color image effect in high-contrast scenes by setting the ideal brightness level of the image.
When the Color Stream is ![]() , adjust the AETargetLuminance in real-time according to the color image. The higher the set value, the higher the image brightness.
, adjust the AETargetLuminance in real-time according to the color image. The higher the set value, the higher the image brightness.

AETargetLuminance
RgbAutoExpo
Dynamically adjusts the exposure time and gain of the color image based on the image brightness, thereby avoiding overexposure or underexposure.
When the Color Stream is ![]() , check the RgbAutoExpo .
, check the RgbAutoExpo .

Setting the Effect of Automatic Exposure
Struct Aec roi
Automatically adjusts the image exposure time and gain based on the brightness of the region of interest (ROI) in the image, achieving better image quality.
Follow these steps to set the struct aec roi function:
When the Color Stream is
, select RgbAutoExpo to start setting the struct aec roi.After selecting struct aec roi , use the left mouse button to drag and select the region of interest on the color image.
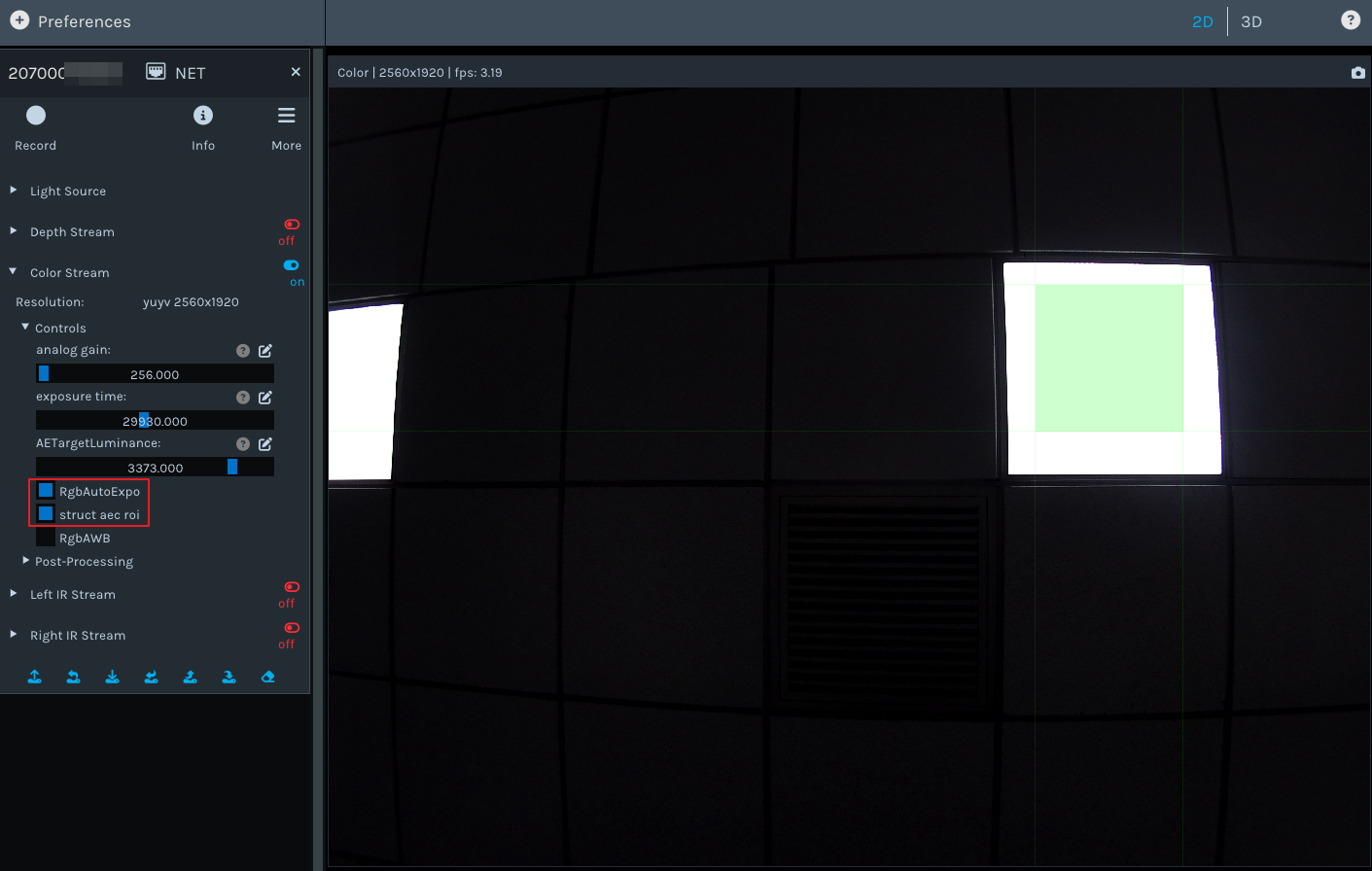
Setting Auto Exposure ROI
Note
Once this feature is successfully set, it will remain effective continuously. To restore the original state of the image, you will need to redraw the region of interest (ROI).
RgbAWB
Corrects color deviations caused by different light sources, improving image authenticity and color accuracy.
When the color stream is ![]() , select RgbAWB and choose whether to enable auto white balance as needed.
, select RgbAWB and choose whether to enable auto white balance as needed.
Comparison before and after enabling the RgbAWB:
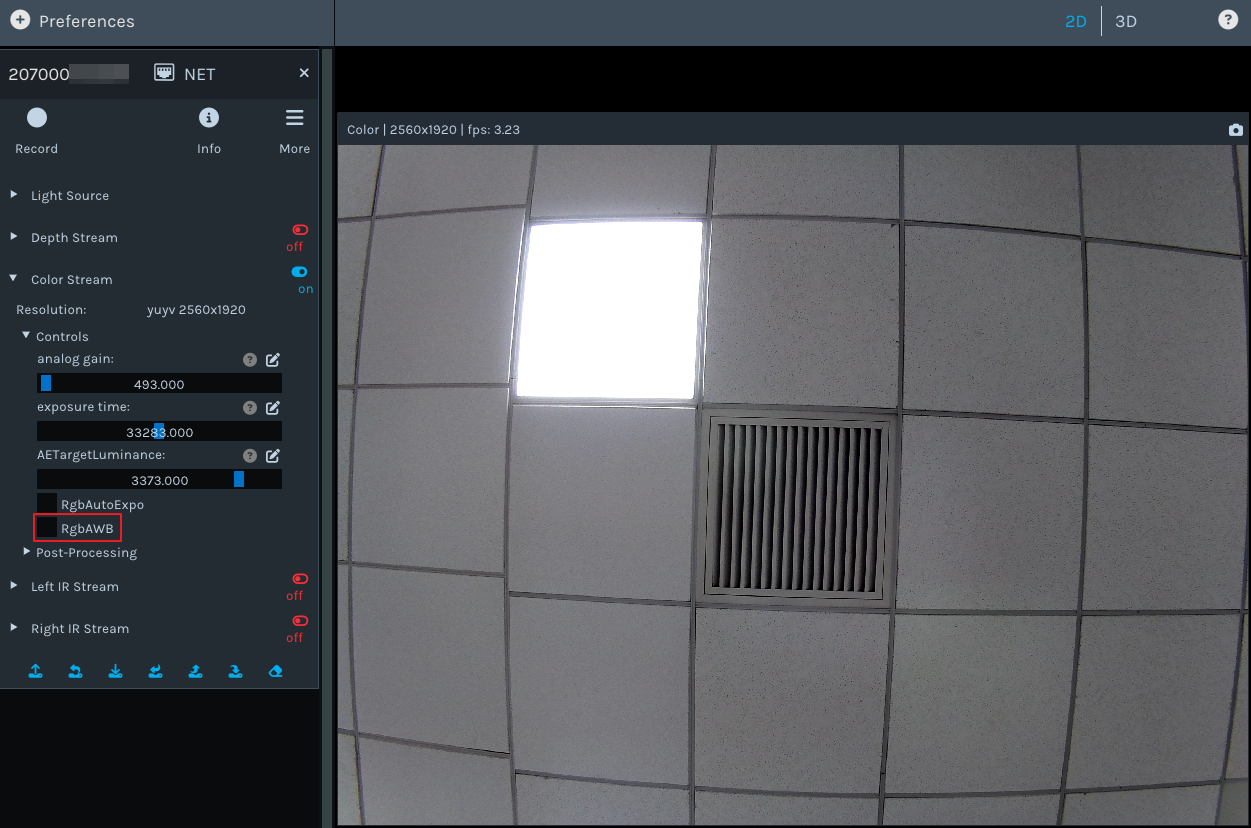
Before enabling the RgbAWB
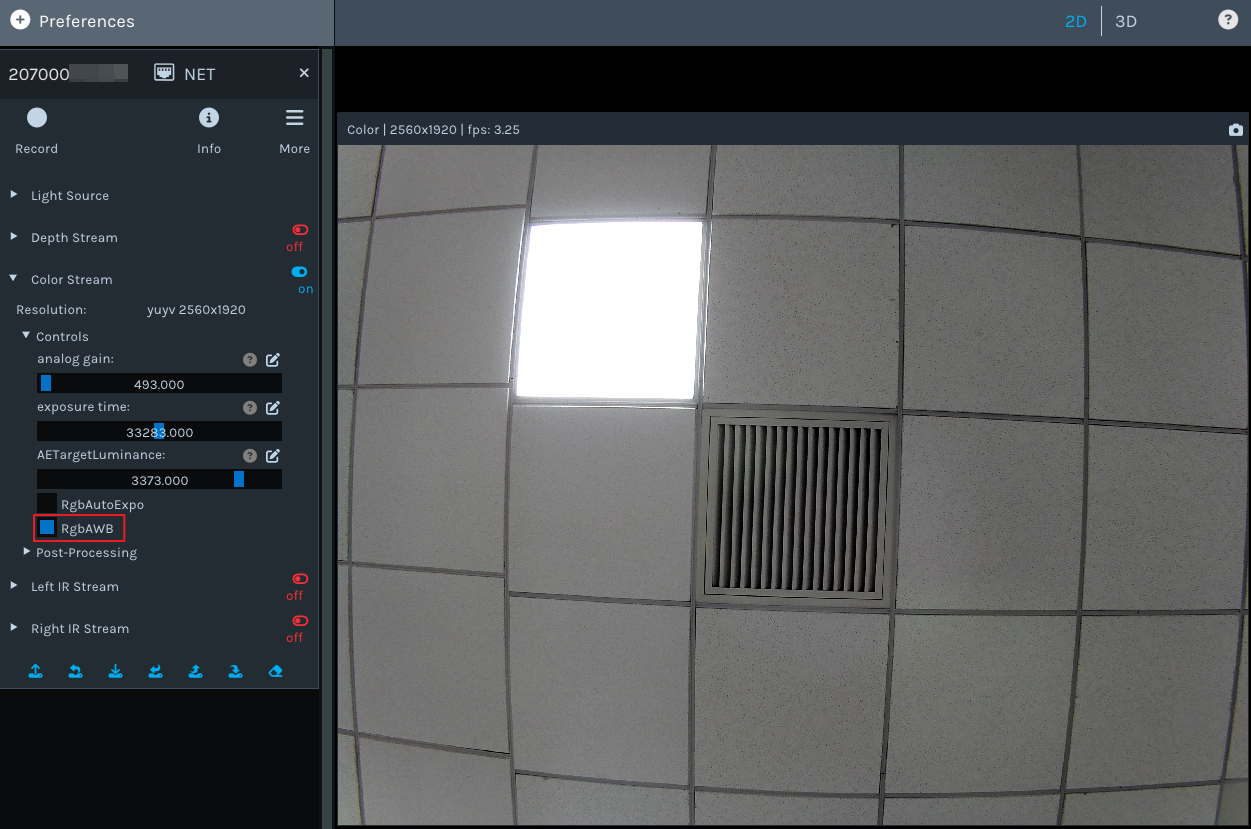
After enabling the RgbAWB
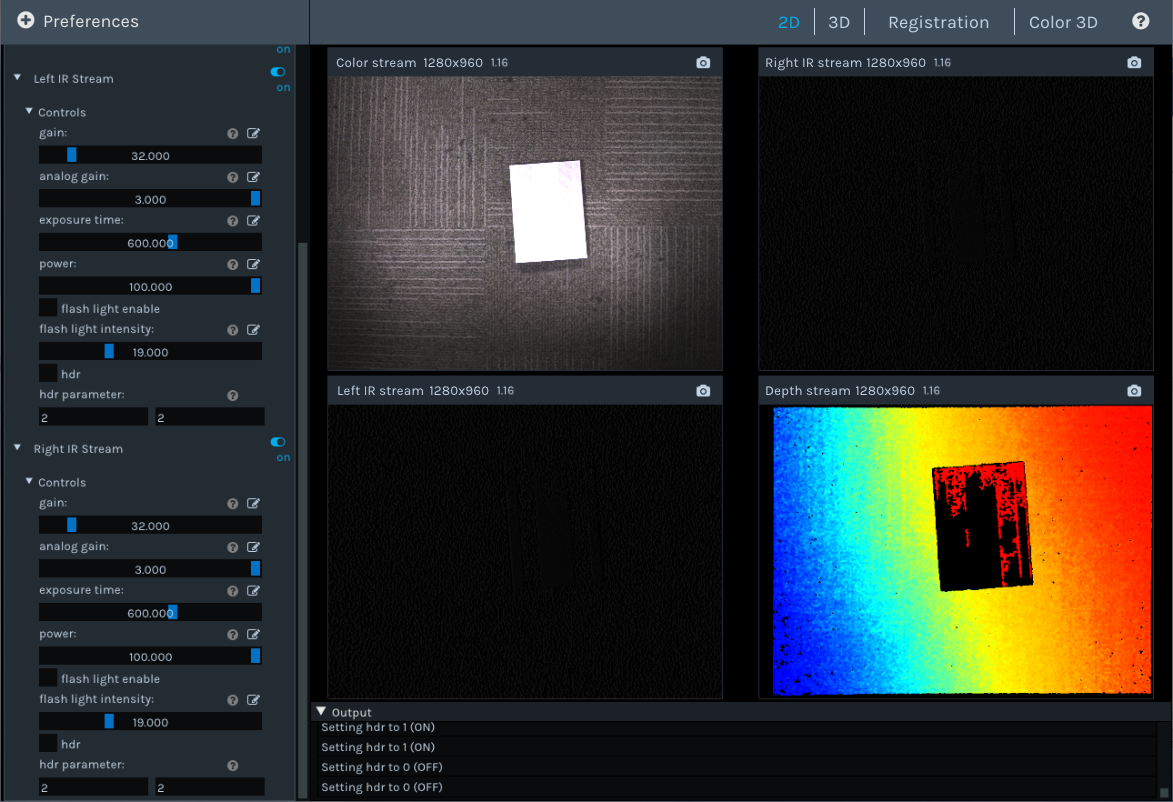
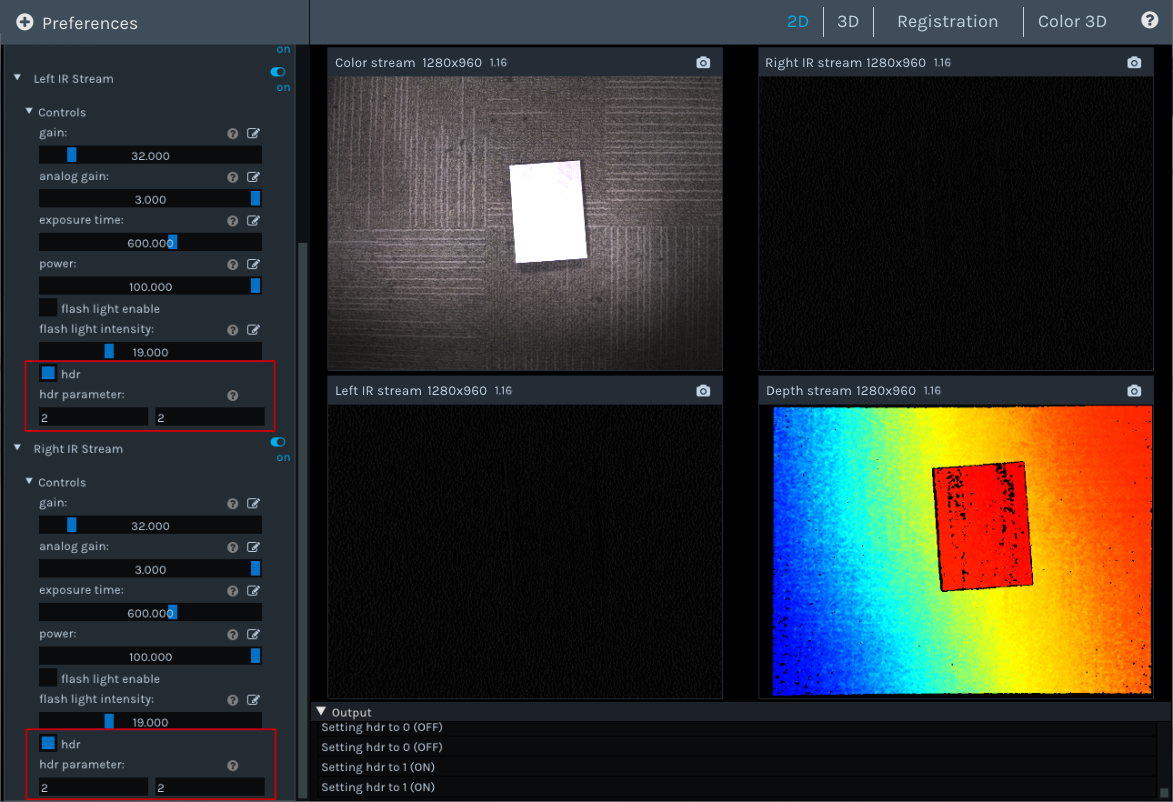
HDR
Optimizes depth imaging in high-contrast scenes. After setting the HDR parameters, you need to adjust the exposure time of the left and right IR to achieve the best depth map quality.
Follow these steps to set up the HDR:
When the left IR stream and right IR stream are
, select HDR, set Parameter 1 and Parameter 2, and press the Enter to confirm the settings.Tip
The setting range for Parameter 1 and Parameter 2 is 0, 1, 2.

Set Parameter 1 and Parameter 2
Set the exposure time for the Left IR and Right IR to achieve the best depth map quality.
Comparison before and after enabling the HDR:
Before enabling the HDR
After enabling the HDR
Distortion Correction Parameters
Performs distortion correction on the output left and right grayscale images.
When the data stream is ![]() , select undistort in either the Left IR Stream or Right IR Stream to obtain the distortion-corrected grayscale images.
, select undistort in either the Left IR Stream or Right IR Stream to obtain the distortion-corrected grayscale images.
Comparison before and after enabling the undistort:
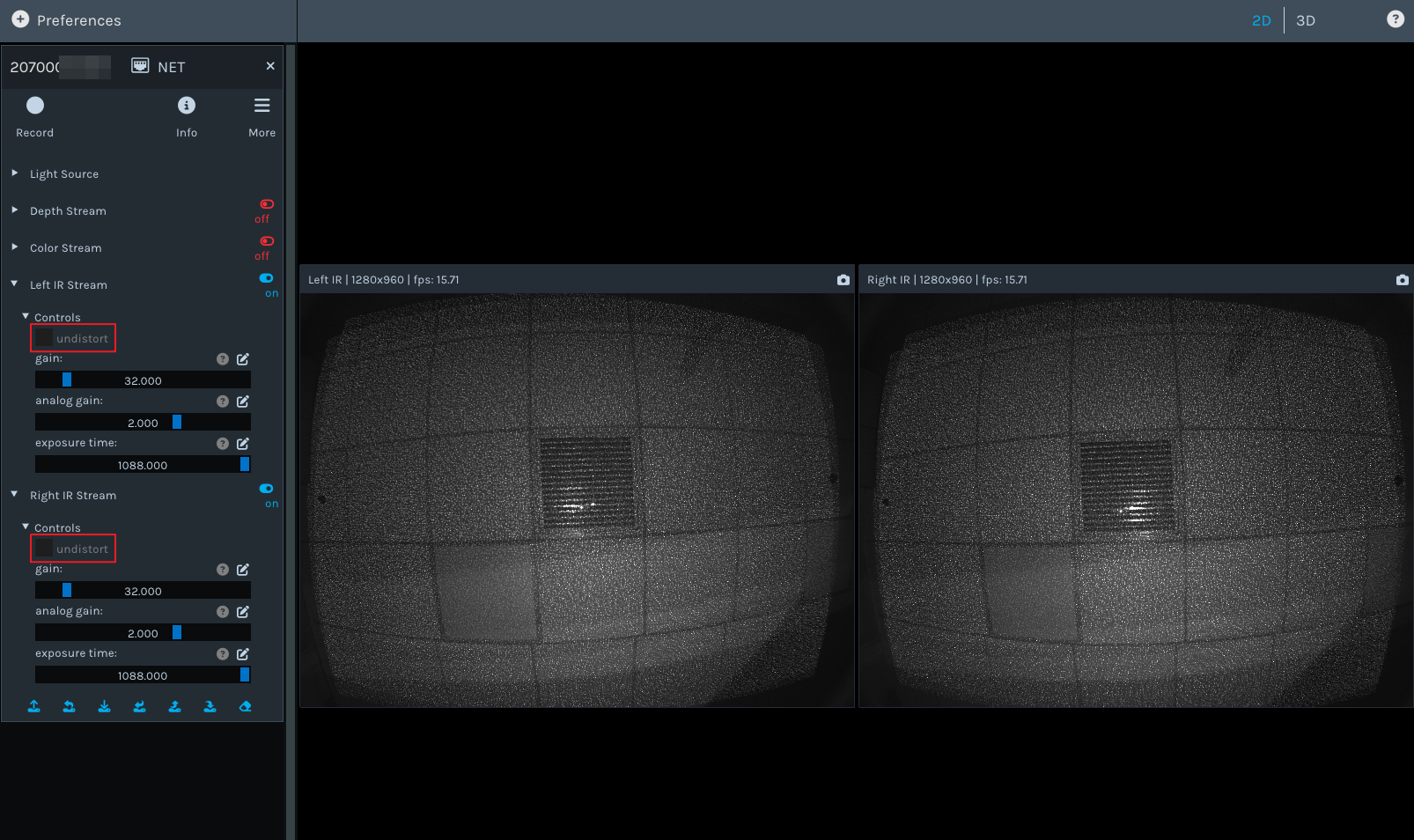
Before enabling the undistort

After enabling the undistort
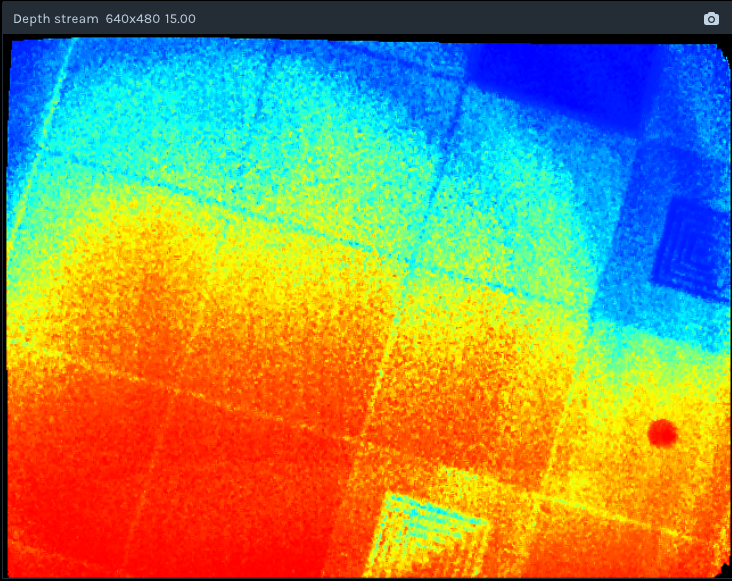
Depth Visualization
The following are the image tuning functions for depth map rendering at the software level.
Color Scheme
When the Depth Stream is ![]() , set the Color Scheme.
, set the Color Scheme.
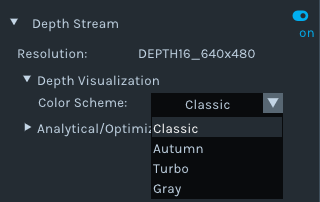
Color Scheme
Supports switching between four color schemes: Classic (top left), Turbo (bottom left), Gray (bottom right), and Autumn (top right). These schemes are used to render the depth map and enhance the visual experience.
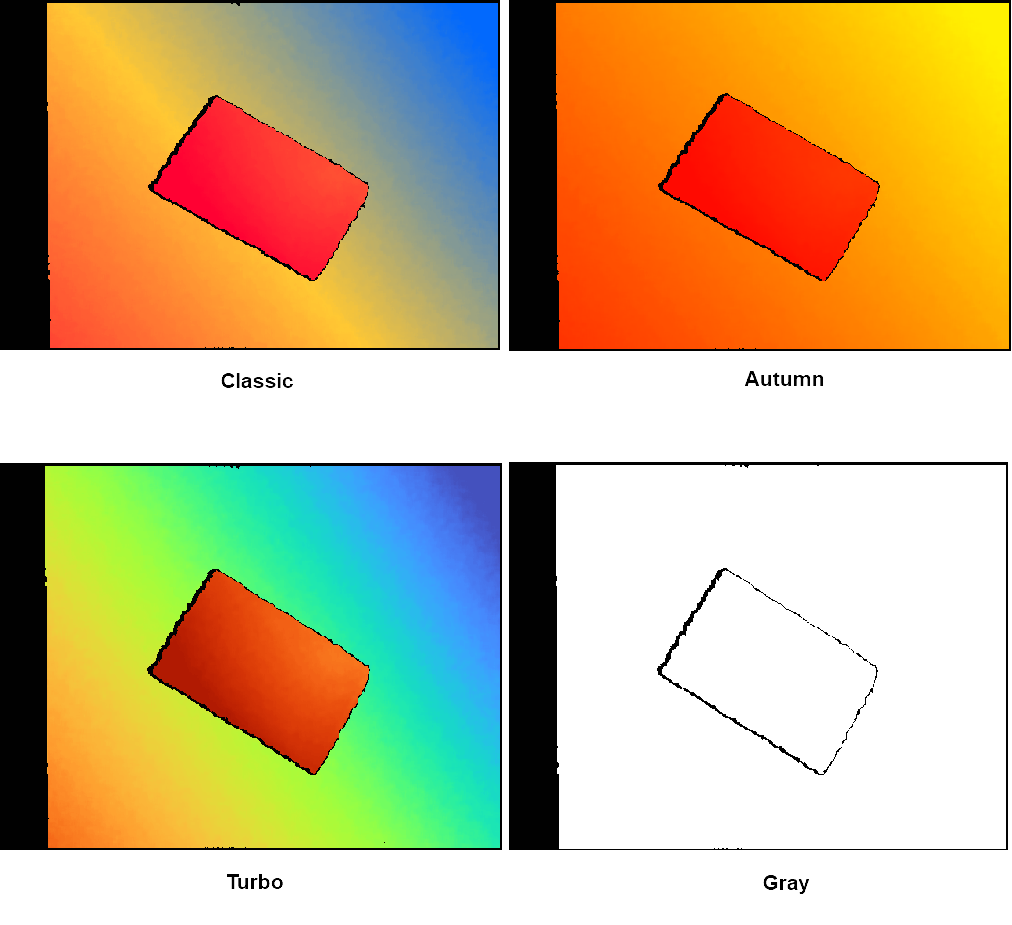
Effect diagrams of the four Color Schemes
Analytical/Optimize
The following are the software-level quality assessment and post-processing functions for depth maps and point clouds.
Analytical Type
Data analysis of depth maps.
When the Depth Stream is ![]() , set the Analytical Type.
, set the Analytical Type.
Select single pixel, the following information is displayed in real-time at the bottom left corner of the depth view:
Depth of center : The depth value of the center point of the depth map.
Depth of (X,Y) : The depth value of the point indicated by the mouse cursor.

single pixel
Select rectangle area, drag with the left mouse button on the depth map to select the region of interest (ROI). The following information is displayed in real-time at the bottom left corner of the depth view:
Mean distance of ROI(x1 y1 x2 y2): The average depth value of all points within the ROI.
Fit plane distance of ROI(x1 y1 x2 y2): The depth distance from the camera’s optical center to the fitted plane of the ROI.
Planarity of ROI(x1 y1 x2 y2): The planarity of the ROI. The more uniform the depth values within the ROI, the smaller the planarity value.
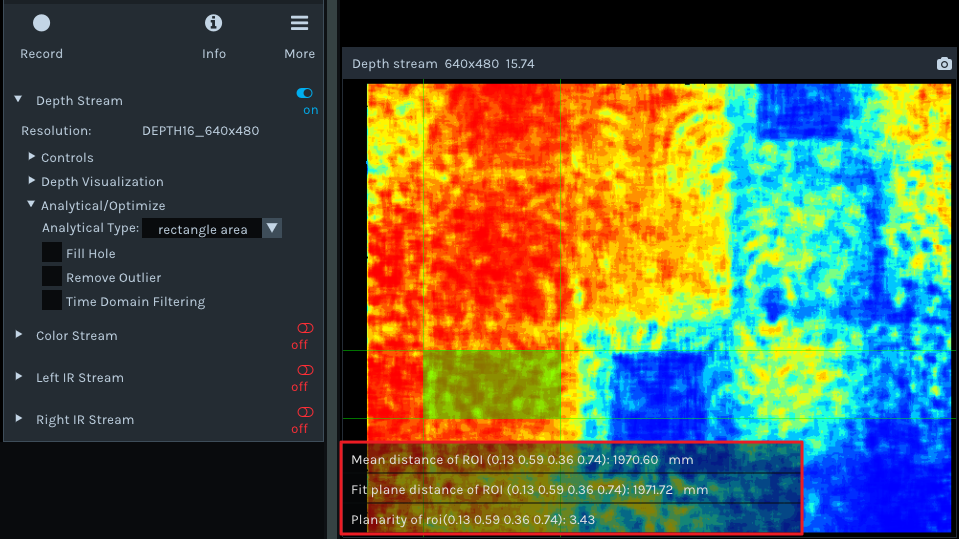
rectangle area
Fill Hole
Fills in missing depth data. When used in conjunction with the Remove Outlier function, it achieves the better depth map.
When the Depth Stream is ![]() , select Fill Hole and adjust the k Size and h Size.
, select Fill Hole and adjust the k Size and h Size.
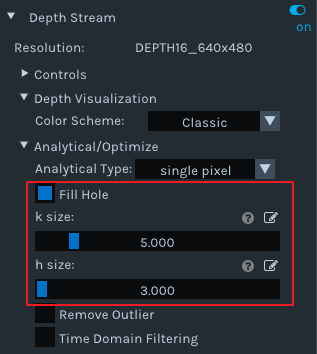
Fill Hole
Note
If the parameter values for k Size and h Size are set too big, it may cause distortion in the depth map.
Remove Outlier
Reduces outliers and mismatched points in the point cloud.
When the Depth Stream is ![]() , select Remove Outlier and adjust the spk size and spk diff according to the depth map.
, select Remove Outlier and adjust the spk size and spk diff according to the depth map.
If the number of points in a region is less than the spk size setting, the points in that region are considered outliers and will be removed. If the depth difference between adjacent pixels in a region is less than the spk diff setting, the adjacent pixels in that region are considered part of the same outlier.
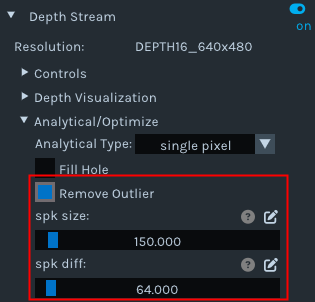
Remove Outlier
Time Domain Filtering
Averages multiple frames of data to remove noise and smooth the point cloud.
When the Depth Stream is ![]() , select Time Domain Filtering and adjust the time-domain frame count according to the point cloud map.
, select Time Domain Filtering and adjust the time-domain frame count according to the point cloud map.
The larger the value set for the time-domain frame count parameter, the smaller the depth value jitter and the smoother the point cloud.

Time Domain Filtering
Median Filtering
Eliminates isolated noise points while preserving edge information as much as possible.
When the Depth Stream is ![]() , select Median Filtering and adjust the Ksize according to the point cloud map.
, select Median Filtering and adjust the Ksize according to the point cloud map.
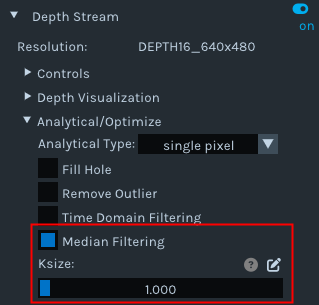
Median Filtering
Post-Processing
Image tuning functions for color images.
Auto ISP
Converts BAYER images with color casts into color images in the normal color space.
Note
Cameras equipped with a hardware ISP module can output color images in the normal color space without the need for post-processing using the Auto ISP function.
When the Color Stream is ![]() , select Auto ISP to correct BAYER color images with color casts.
, select Auto ISP to correct BAYER color images with color casts.
Auto ISP
Undistort EN
Performs distortion correction on the output color images.
When the Color Stream is ![]() , select Undistort EN to obtain distortion-corrected color images.
, select Undistort EN to obtain distortion-corrected color images.

Undistort EN