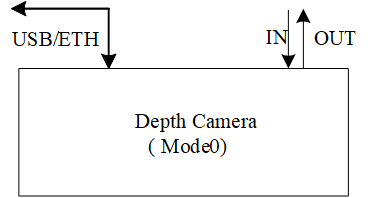
The depth camera receives software trigger commands through a USB interface or an Ethernet interface, or hardware trigger signals through an external trigger circuit. It captures image sensor data, performs depth disparity calculation, and outputs valid depth data. After completing one image integration cycle and outputting depth data, the camera automatically enters standby status, waiting for the next trigger signal.
In this mode, the camera initiates an image capture action and outputs a depth map each time it receives a trigger command via the USB interface or Ethernet interface.
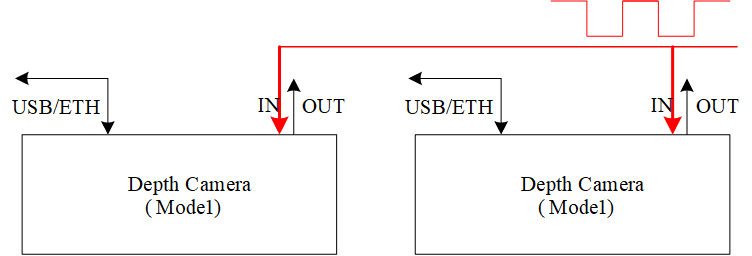
In this mode, the trigger signal input circuits of multiple cameras are connected to the same external hardware trigger signal source. Each time the external hardware trigger signal is sent out, the multiple cameras capture images simultaneously.
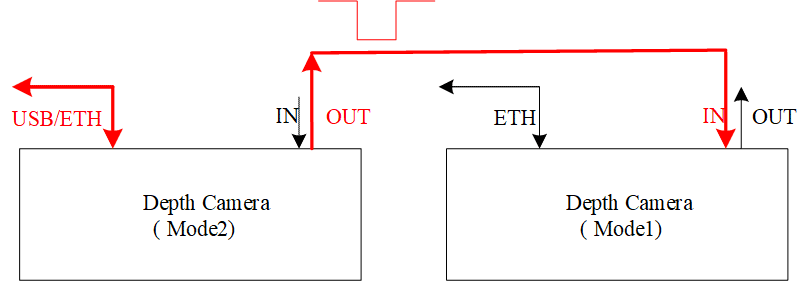
Mode 2: Master Device Single Trigger Mode
In this mode, after receiving a software trigger command through an USB interface or an Ethernet interface, the depth camera outputs a hardware trigger signal through the TRIG_OUT pin. The output hardware trigger signal is used as the trigger input signal for the slave device. By connecting the hardware trigger signal of this camera to the TRIG_IN pin of other cameras that work in mode 1, multiple cameras can be synchronized to capture and output synchronized depth maps.
In this mode, the depth camera continuously outputs hardware trigger signals through the TRIG_OUT pin according to the frequency set by the host computer. The output hardware signals are used as the trigger input signal for the slave device. By connecting the hardware trigger signal of this camera to the TRIG_IN pin of other cameras that work in mode 1, multiple cameras can be synchronized to capture images at a set frequency and output synchronized depth maps.
Due to the limited driving capability of the trigger pins of the depth camera, when the camera works in mode 2 or 3, it can drive up to 2 slave devices of the same camera model. If you need to cascade more devices, it is recommended to purchase the Trigger HUB device developed by Percipio to ensure effective signal triggering.
For the method on how to set the work mode using software API, please refer to Work Mode Settings.