多相机标定工具
实际应用中单相机无法覆盖工作区域时,会选择多相机方案。应用多相机输出的图像前,需对多相机的相对位姿进行标定,方便后续的图像融合。多相机标定工具 (MultiCamCalibTool) 仅支持彩色图进行标定。
输入输出终端说明
在工具块编辑区根据需要连接工具的输入输出,终端说明如下表所示。
终端名称 |
终端类型 |
数据类型 |
内容描述 |
|---|---|---|---|
InputImages |
输入型 |
List`1 |
输入的图像 |
Dir |
输入型 |
String |
标定图像的保存路径 |
PatternSize |
输入型 |
Vec2i |
棋盘格标定板横向纵向角点数 |
SquareSize |
输入型 |
Double |
棋盘格标定板单个格子大小 |
GroupIndex |
输出型 |
Int32 |
已保存的图像的组号 |
MultiCameraExtrinsics |
输出型 |
MultiCamExtrinsics |
地平面外参数据 |
ErrorCoef |
输出型 |
Double |
误差系数 |
OutputCameraList |
输出型 |
List`1 |
相机列表 |
设置步骤
下文以 2 台相机为例,介绍如何进行多相机标定。
搭建环境
在 2 台相机的公共视野中摆放棋盘格标定板。
Note
当多台相机无法同时看到标定板时,需要对不同相机组合的视野区域分别采集 10 ~ 15 组图,但要保证有一台相机在不同相机组合之间能够传递信息即可完成全部相机位置标定。
设置多相机标定参数
选择以下任意方式进入 多相机标定工具 页面。
在主界面菜单栏中,选择“工具集”>“多相机标定工具”。
双击工具箱中的“多相机标定工具”添加至工具块编辑区,并双击“MultiCamCalibTool”。
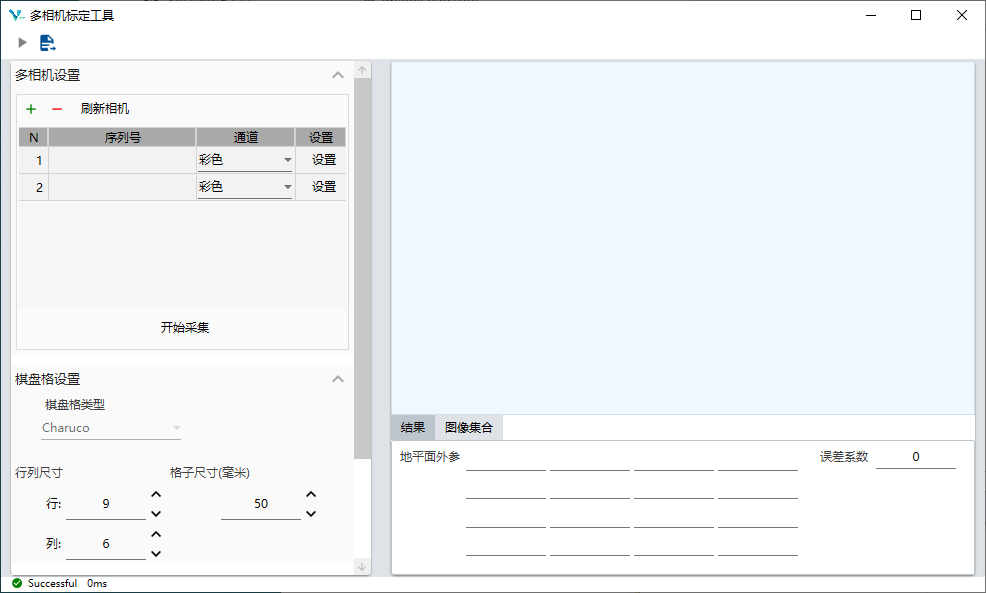
按照以下步骤,选择相机。
在“多相机设置”区域设置相机个数。
点击
 ,增加多相机标定个数。
,增加多相机标定个数。选中表格对应行,并点击
 ,删除相机。
,删除相机。

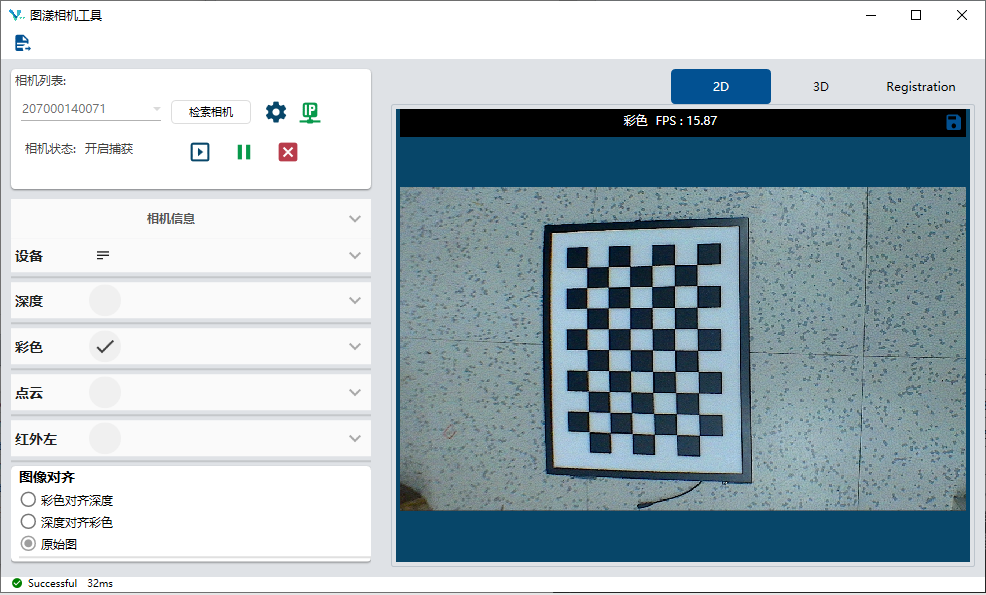
点击表格对应行的“设置”,调出 图漾相机工具 页面。
在 图漾相机工具 页面中点击“检索相机”,在相机列表中选择相机并点击
 开启相机。
开启相机。勾选“彩色”,切换视图至 “2D”,查看棋盘格标定板成像质量是否满足标定要求,若棋盘格角点看不清楚,可能是彩色图出现过曝或过暗,请调整相机彩色图参数。
在 多相机标定工具 页面的“棋盘格设置”区域设置棋盘格标定板的规格。
棋盘格类型:标定板类型。当前仅支持棋盘格标定板标定。
行列尺寸:棋盘格每行角点数和每列角点数。
格子尺寸:棋盘格单个格子的边长。单位:mm。
在“目录”处设置标定图像文件的保存路径。
点击“开始采集”。
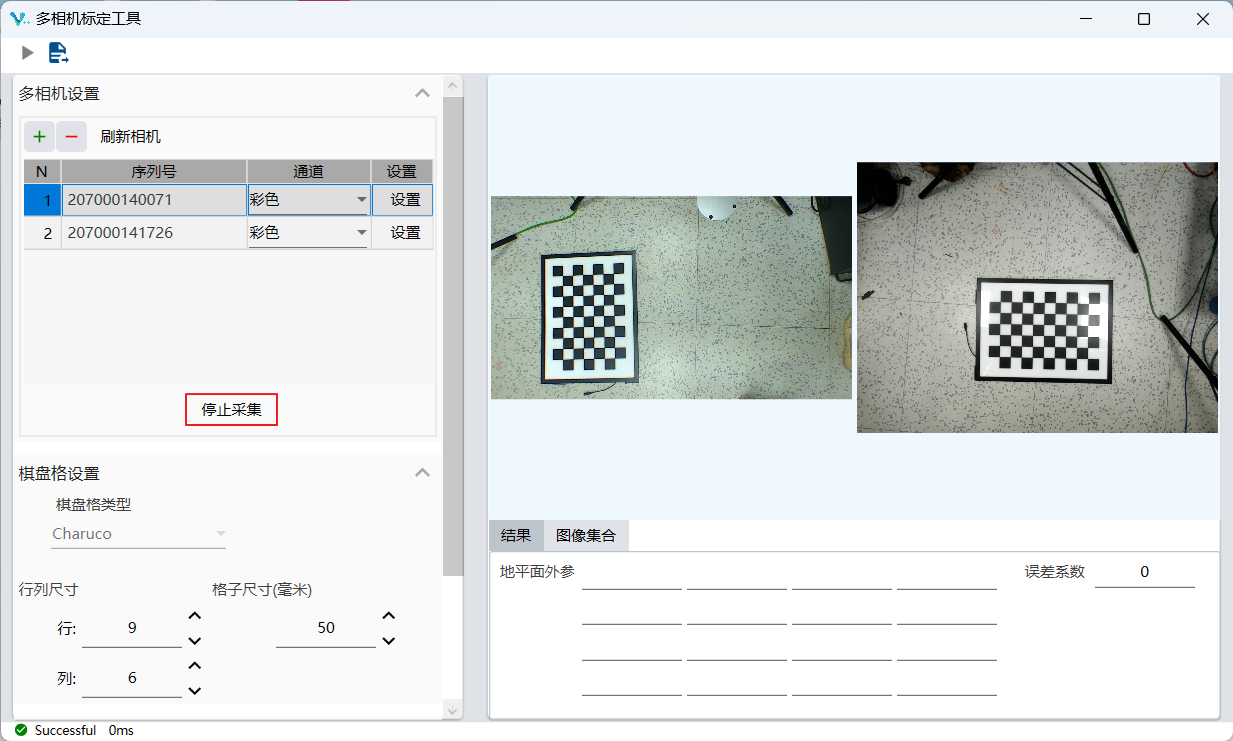
在确保标定板完整的出现在公共视野时,点击“保存图像”,完成第一次存图。
每小角度旋转标定板一次后,点击一次“保存图像”,保存 10~15 组图。
点击“停止采集”,使相机停止采集图像。
点击“校正”,开始计算标定数据。
标定结果说明
标定结果和标定图像集显示在 多相机标定工具 设置界面右下角。
地平面外参:标定得到的外参数据。
误差系数:标定的位移偏差系数。该值越小则多相机标定误差越小,一般不超过 0.2。
Note
误差系数明显过大时,请检查标定板是否变形并查看保存的图像中标定板成像质量是否满足标定要求。若存在问题,点击“清除结果”,再按照以上步骤重新标定。