棋盘格校正工具
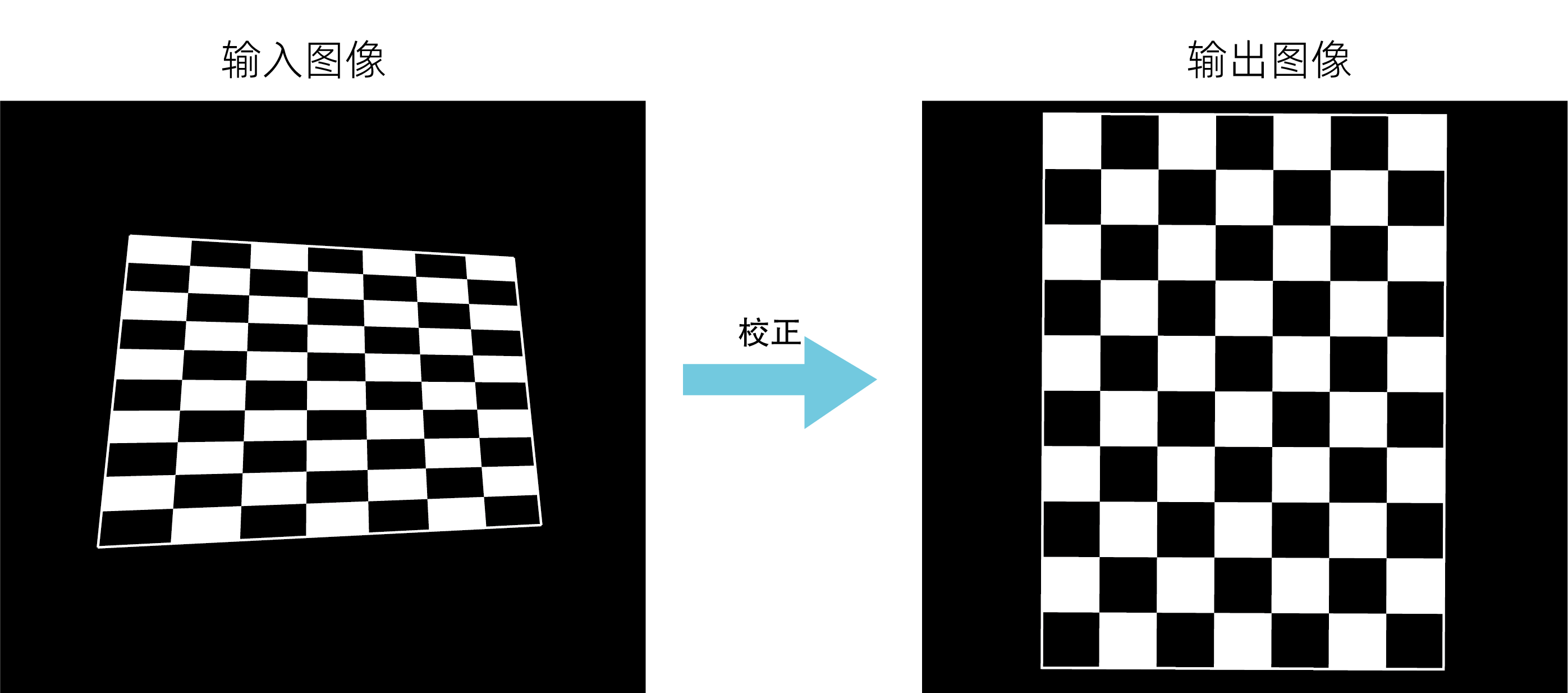
棋盘格校正工具 (CalibCheckerboardTool) 主要用于 2D 测量,将图像校正到正对棋盘格的视角下(该视角下图像中的每个像素的分辨率都相同)。
Note
拍摄位置变化之后需要重新进行校正。
棋盘格校正工具定位棋盘格标定板的角点位置,并确定输入图像坐标系下的角点位置与棋盘格平面坐标系下的角点位置之间的最佳 2D 变换关系。后续输入的图像基于该 2D 变换关系可从未校正的空间映射到校正后的空间。
输入输出终端说明
在工具块编辑区根据需要连接工具的输入输出,终端说明如下表所示。

Note
工具块编辑区中仅显示工具的常用输入输出终端,右击工具名称,选择“添加终端”,可在添加终端页面选择终端添加。
终端名称 |
终端类型 |
数据类型 |
内容描述 |
|---|---|---|---|
InputImage |
输入型 |
VisionImage |
输入的图像 |
CalibrationImage |
输入型 |
VisionImage |
标定图 |
Uncalib |
输入/输出型 |
List`1 |
未标定的点 |
RawCalib |
输入/输出型 |
List`1 |
已标定的点 |
CalibrationResultImage |
输出型 |
VisionImage |
标定结果图 |
OutputImage |
输出型 |
VisionImage |
输出的图像 |
参数说明
设置
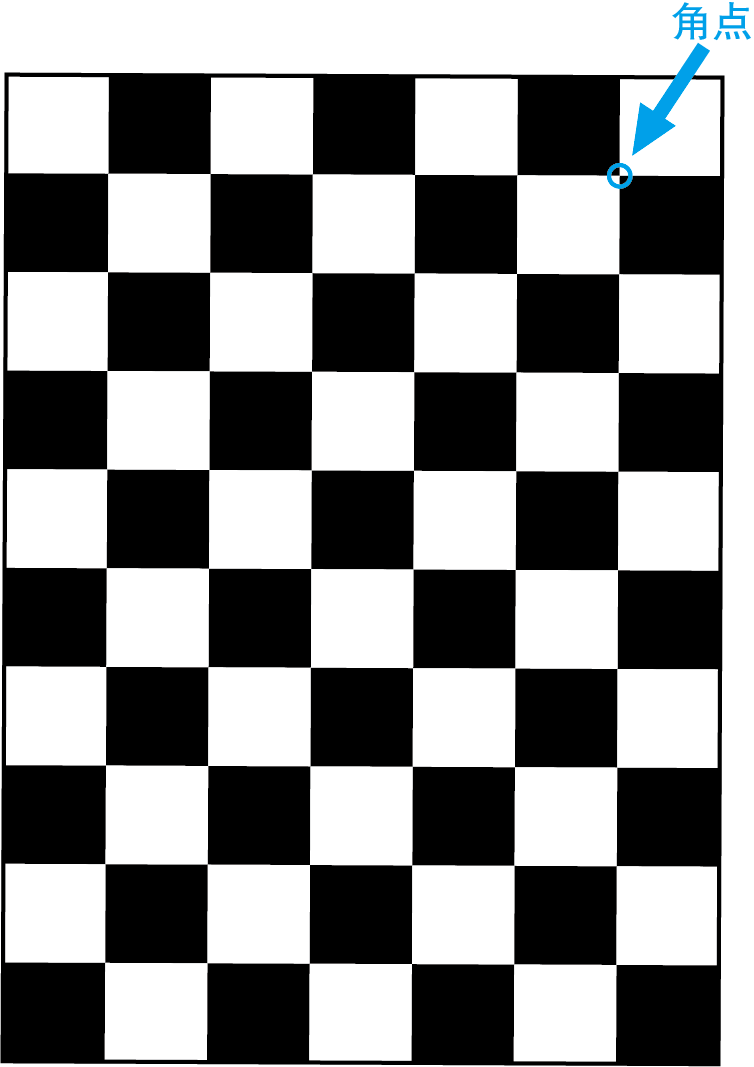
标定板大小
宽度:棋盘格标定板横向角点数。
高度:棋盘格标定板纵向角点数。
棋盘格每个格子大小
宽度:棋盘格标定板每个格子的实际宽度。单位:mm。
高度:棋盘格标定板每个格子的实际高度。单位:mm。
校正原点
通过以下参数改变已标定空间的坐标原点到目标位置。
X/Y:指定校正原点的坐标 (X,Y)。
X轴旋转:X 轴的旋转角度。单位:度。
目标矩形
目标矩形
勾选“目标矩形”,CalibrationResultImage 标定结果图中显示绿色目标矩形,工具会将目标矩形框选区域作为 OutputImage 输出图输出。
X/Y:目标矩形的左上角坐标。
宽度:目标矩形的宽度。
高度:目标矩形的高度。
取消勾选“目标矩形”,工具会使用整张 CalibrationResultImage 标定结果图作为 OutputImage 输出图输出。
Note
修改了目标矩形后需点击“计算校正”,重新计算校正结果。
图像处理
缩放:缩放 CalibrationResultImage 标定结果图。(0,1) 为缩小系数。(1, +∞) 为放大系数。
旋转:旋转 CalibrationResultImage 标定结果图。单位:度。
Note
修改了图像处理参数后需点击“计算校正”,重新计算校正结果。
图形
显示原始已校正的点:勾选“显示原始已校正的点”,点击“计算校正”后,CalibrationImage 标定图中以“金黄色+”的形式显示已校正的点。
显示已校正的轴:勾选“显示已校正的轴”,点击“计算校正”后,CalibrationImage 标定图中显示金黄色已校正的 XY 坐标系。
操作按钮
抓取校正图像:点击“抓取校正图像”,可将当前输入的图像 InputImage 复制成标定图 CalibrationImage。
计算校正:点击“计算标定”,工具可基于当前的标定图和参数设置计算标定结果。
结果说明
完成“抓取校正图像 > 设置参数 > 计算校正”后,得到点结果和转换结果。计算校正后运行工具,便可得到 OutputImage 输出图像。
点结果
N:棋盘格角点序号。
未校正 X/Y:当前角点未校正前的像素坐标 (X,Y)。
原始的已校正 X/Y:当前角点已校正的实际坐标 (X,Y)。
转换结果
平面透视转换:这些系数描述了输入图像坐标系到棋盘格平面坐标系的透视变换关系。