多相机融合工具
多相机融合工具 (MultiCamMergeTool) 可基于多相机标定工具生成的地平面外参进行多相机图像融合,是多相机标定工具的后续操作。
Note
请确保从多相机标定到多相机融合阶段,相机的相对位置未发生改变。
输入输出终端说明
在工具块编辑区根据需要连接工具的输入输出,终端说明如下表所示。
终端名称 |
终端类型 |
数据类型 |
内容描述 |
|---|---|---|---|
MultiCameraExtrinsics |
输入型 |
MultiCamExtrinsics |
地平面外参数据 |
NewCamId |
输入型 |
String |
相机ID |
PixelLength |
输入型 |
Size2d |
融合后的图像像素长度 |
ImageSize |
输入型 |
Size2d |
融合后的深度图尺寸 |
RotationDegree |
输出型 |
Double |
旋转角度 |
Translation |
输出型 |
Size2d |
平移 |
BlurKernelSize |
输出型 |
Int32 |
模糊像素 |
OutputDepthImage |
输出型 |
VisionImage |
融合后的深度图 |
操作步骤
双击工具箱中的“多相机融合工具”添加至工具块编辑区。
通过
MultiCameraExtrinsics和OutputCameraList输入终端输入多相机标定工具生成的地平线外参和相机列表。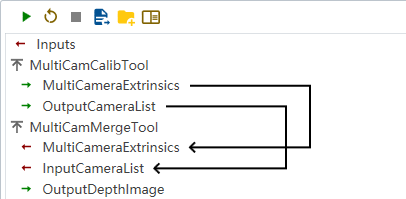
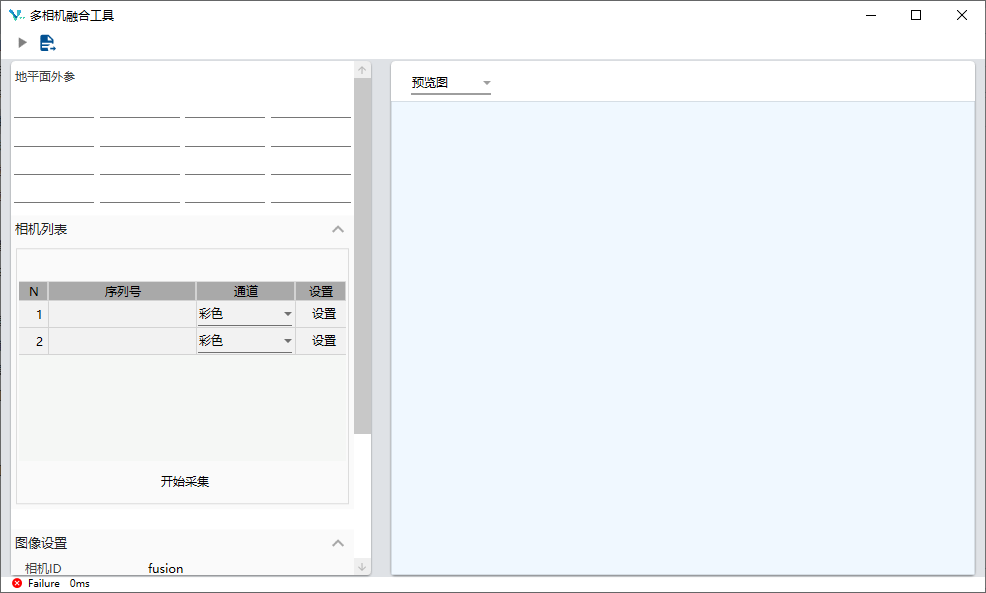
在工具块编辑区双击“MultiCamMergeTool”进入 多相机融合工具 页面。
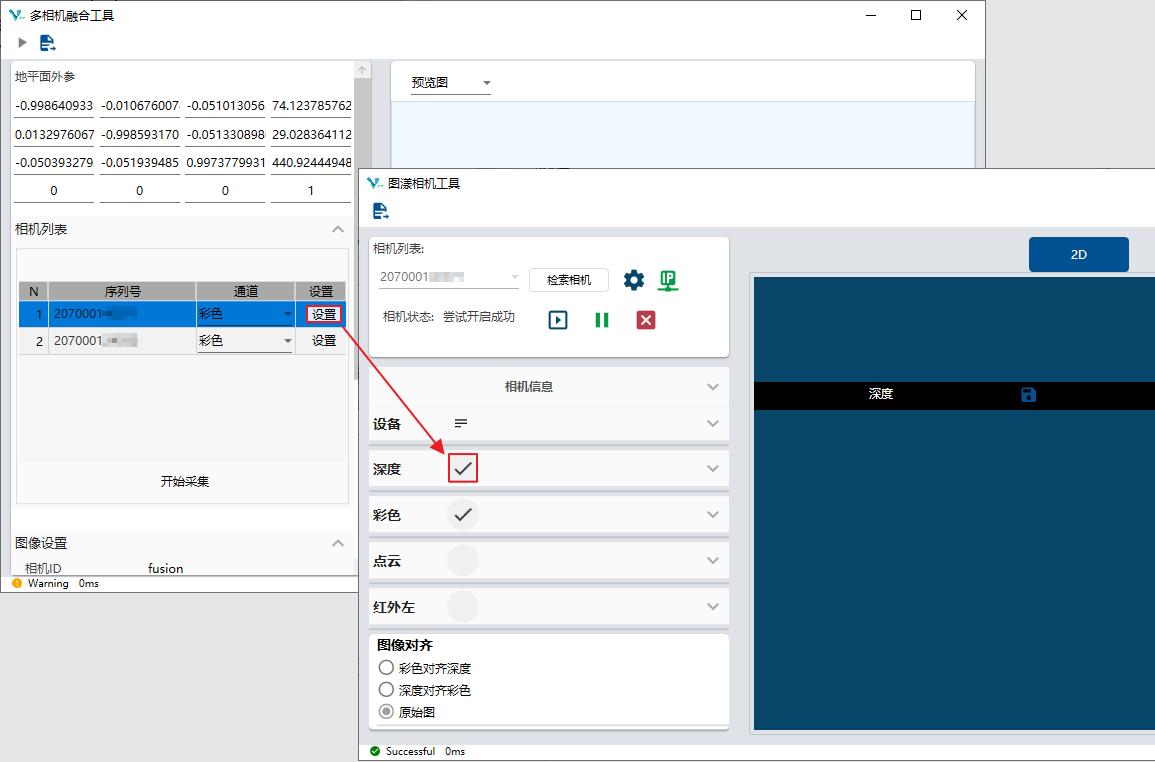
点击“设置”,并在 图漾相机工具 页面勾选“深度”。
在 多相机融合工具 页面设置图像参数。
图像尺寸:设置融合后的深度图尺寸。单位:像素。
像素长度:每个像素的长度。单位:mm。
点击“采集图像”,便可在多相机融合工具设置页面右侧查看预览图和合成图。
根据合成图,设置调节参数。
平移 X/Y:该参数用于平移融合后的深度图。单位:mm。
角度:该参数用于旋转融合后的深度图,绕图像中心旋转至合适的角度。单位:度。
模糊尺寸:该参数用于平滑融合后的深度图。该参数需设置为奇数。