图漾相机工具
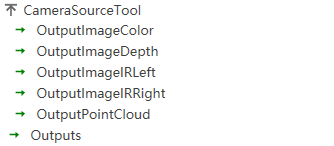
图漾相机工具(CameraSourceTool)支持枚举图漾相机、设置相机 IP、开启相机、查看相机信息、设置相机参数并预览采集的图像。
输入输出终端说明
在工具块编辑区根据需要连接工具的输入输出,终端说明如下表所示。
终端名称 |
终端类型 |
数据类型 |
内容描述 |
|---|---|---|---|
OutputImageColor |
输出型 |
VisionImage |
采集的彩色图 |
OutputImageDepth |
输出型 |
VisionImage |
采集的深度图 |
OutputImageIRLeft |
输出型 |
VisionImage |
采集的左红外图 |
OutputImageIRRight |
输出型 |
VisionImage |
采集的右红外图 |
OutputPointCloud |
输出型 |
PointCloud |
采集的点云图 |
快速开始
该部分内容主要介绍 Vision++ 图漾相机工具的使用流程:
使用图漾相机工具前,请先:
修改相机 IP 地址
Vision++ 支持修改网络相机的 IP 地址为静态或动态 IP。设置相机 IP 前,请确保上位机 IP 在目标网段上。
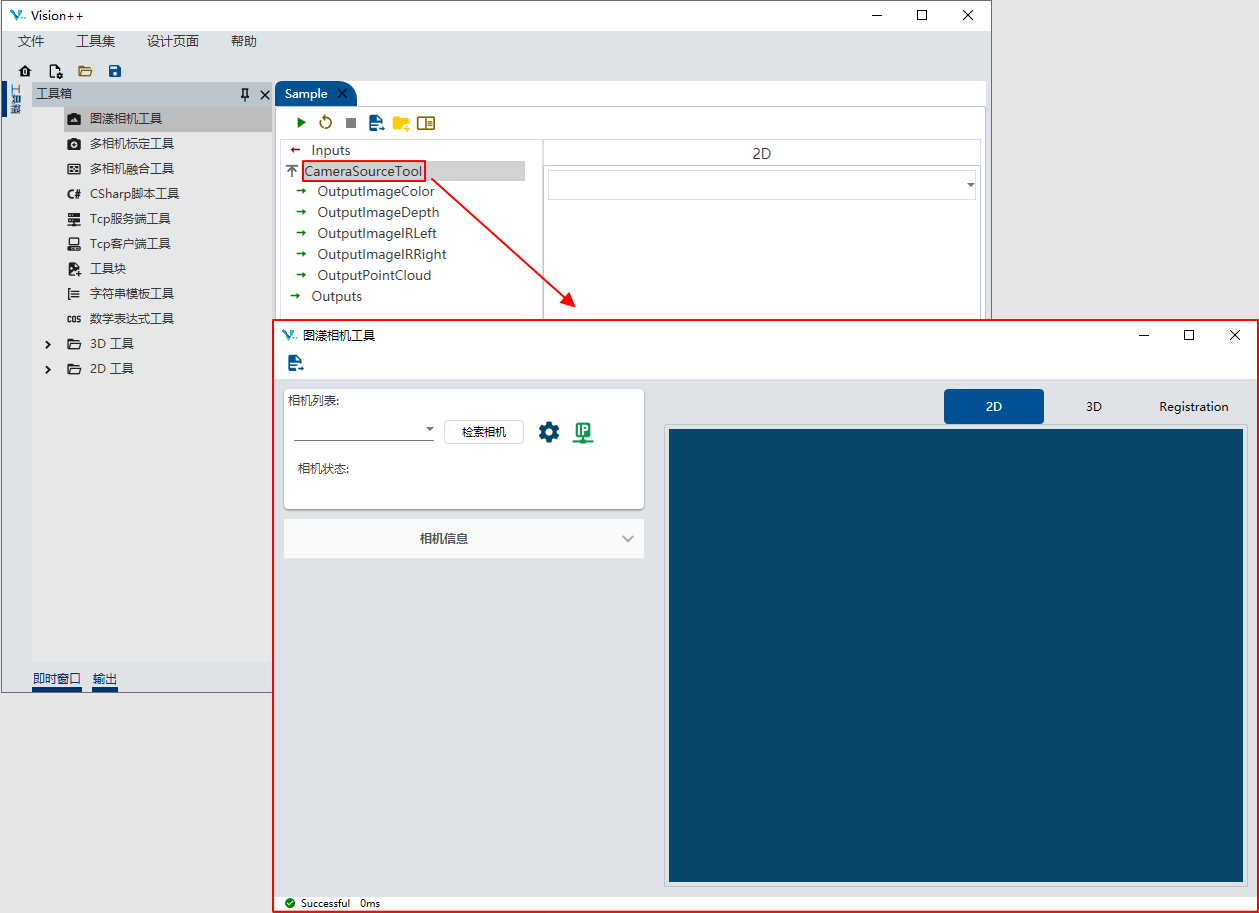
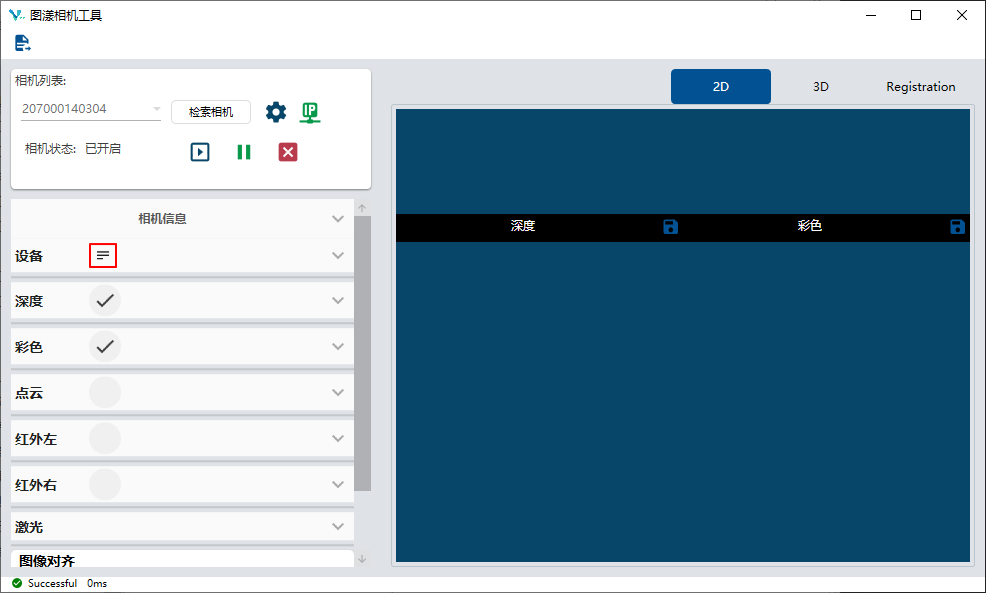
在工具块编辑区双击“CameraSourceTool”进入 图漾相机工具 页面。
点击
 ,进入 相机 IP 设置 页面。
,进入 相机 IP 设置 页面。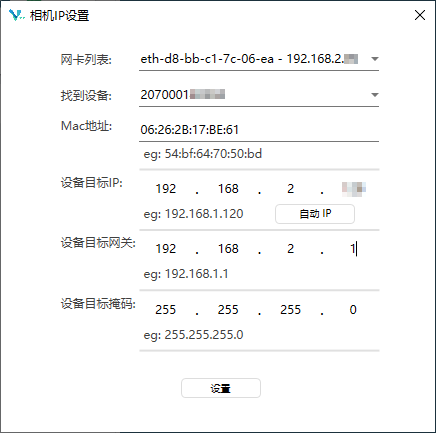
在“网卡列表”处选择相机连接的网卡。
在“找到设备”处选择相机的序列号。
设置 IP。
若需设置静态 IP,手动填写“设备目标IP”、“设备目标网关”和“设置目标掩码”。
若需设置动态 IP,点击“自动 IP”即可。
点击“设置”。
连接相机
点击 图漾相机工具 页面的“检索相机”,在相机列表中选择待连接的相机。
点击
 ,开启相机。
,开启相机。
开启相机后,根据需要进行以下操作:
点击
 ,开始采集图像。
,开始采集图像。点击
 ,暂停采集图像。
,暂停采集图像。点击
 ,关闭相机。
,关闭相机。
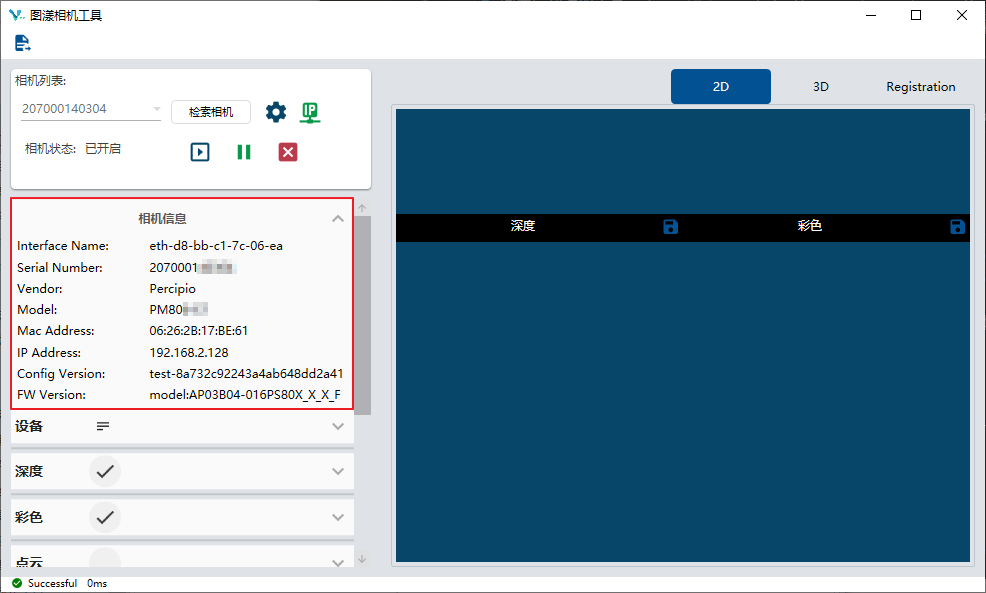
查看相机信息
开启相机后,便可在“相机信息”一栏查看当前已开启的相机信息,包括:
Interface Name:接口名称
Serial Number:SN 序列号
Vendor:厂商
Model:型号
Mac Address:Mac 地址
IP Address:IP 地址
Config Version:配置版本
FW Version:固件版本
设置工作模式
开启相机后,在未采集图像时,点击 ![]() ,并选择工作模式。
,并选择工作模式。
工作模式 |
描述 |
|---|---|
关闭触发模式 |
点击 |
Slave 触发模式-硬件触发 |
将外部硬触发信号源与相机连接,相机(处于开启状态)根据触发信号频率采集图像。 |
Slave 触发模式-软件触发(连续) |
点击 |
Slave 触发模式-软件触发(单步) |
点击 |
设置相机参数
Vision++ 支持设置相机每个组件的参数,如设备、深度、彩色、红外。
开启相机后,点击 ![]() 展开页面,并设置设备/深度/彩色/红外左/红外右参数。
展开页面,并设置设备/深度/彩色/红外左/红外右参数。
关于每个组件的参数,详情请查看 参数说明。
预览图像
Vision++ 支持实时预览深度图、彩色图、红外图、点云图以及 RGBD 图。
操作步骤
点击
,开启相机。点击
,开始采集图像。预览图像。
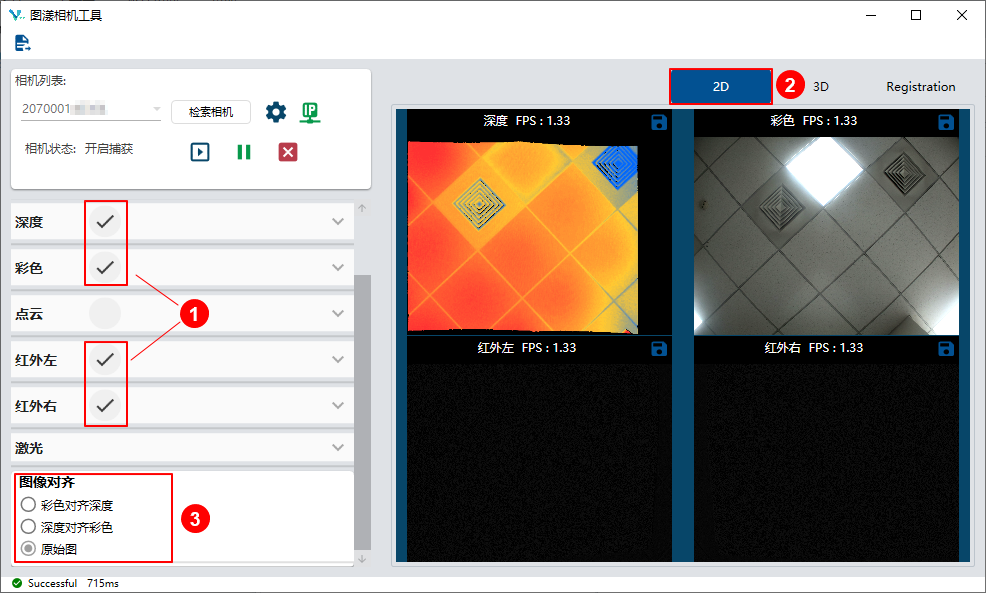
预览深度图/彩色图/红外图
勾选“深度”/“彩色”/“红外”。
切换至 2D 视图,预览深度图、彩色图、红外图。
若需查看原始图像,将“图像对齐”设置为“原始图”;若需查看对齐图,将“图像对齐”设置为“彩色对齐深度”或“深度对齐彩色”。
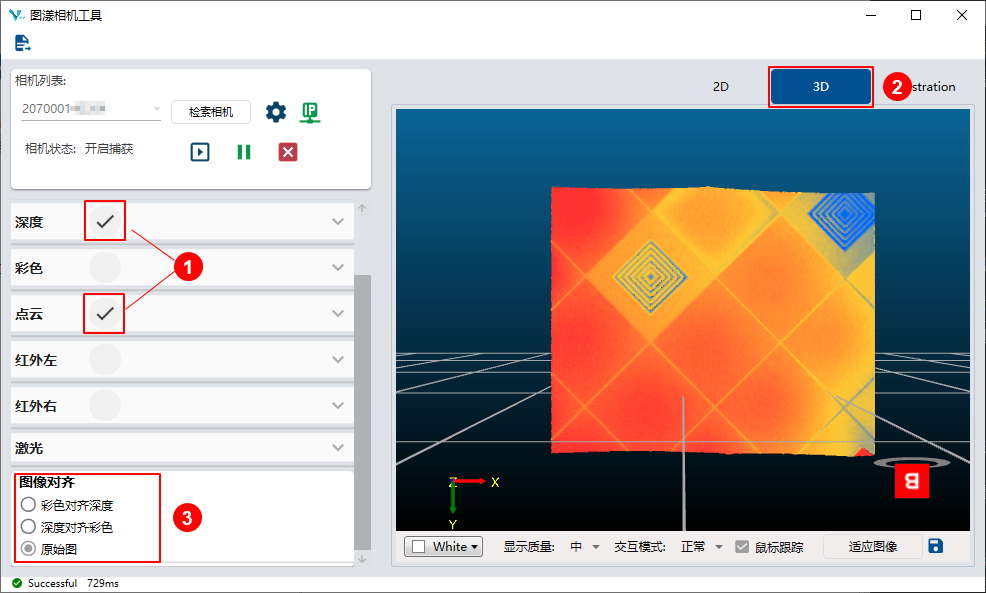
预览点云图
勾选“深度”和“点云”。
切换至 3D 视图,预览点云图。
若需查看原始点云图,将“图像对齐”设置为“原始图”;若需查看彩色点云图,勾选“彩色”,将“图像对齐”设置为“彩色对齐深度”或“深度对齐彩色”。
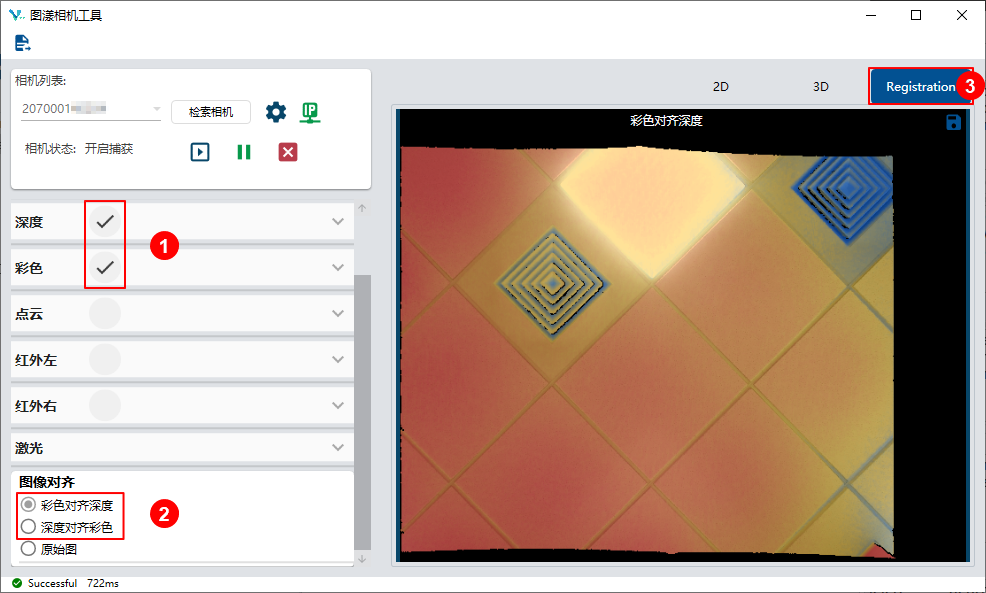
预览 RGBD 对齐图
勾选“深度”和“彩色”。
将“图像对齐”设置为“彩色对齐深度”或“深度对齐彩色”。
切换至 Registration 视图,预览 RGBD 对齐图。
视图说明
2D 视图
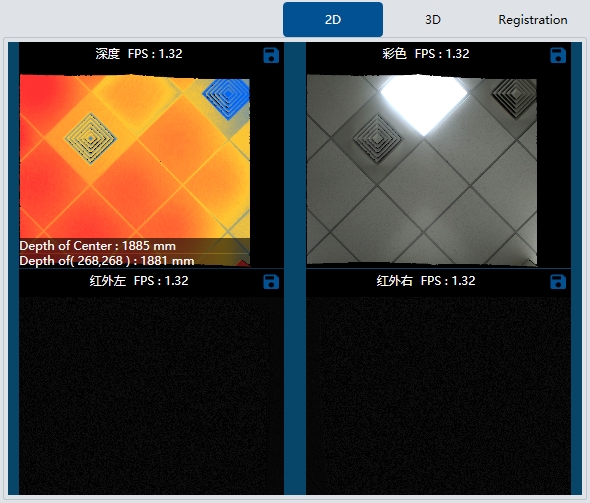
视图信息说明
视图标题栏显示当前图像的名称、图像的帧率、保存图像图标
 。
。鼠标放置在深度图上可查看当前像素的深度值 “Depth of (X,Y)” 以及图像中心的深度值 “Depth of Center”。
视图调整说明
鼠标左键可平移图像
鼠标滚轮可缩放图像
3D 视图

视图设置说明
颜色:点击下拉框可选择点云显示的颜色。
显示质量:视图显示的质量。显示质量越高,对电脑性能要求越高。
交互模式:“正常”显示原始 3D 点云;“流畅”显示稀疏的 3D 点云;“快速”显示 3D 点云的外接矩形。
鼠标跟踪:点击点云某个位置后,便可将此处设置为旋转和缩放的中心。
适应图像:将点云置于视图中央,并调整点云缩放比例以适应视图。
- :保存当前视图。
视图调整说明
鼠标左键可旋转点云
鼠标右键可平移点云
鼠标滚轮可缩放点云
参数说明
设备
参数名 |
描述 |
设置条件 |
|---|---|---|
GVSP resend |
网络相机的图像数据流重传开关。 |
在相机停止采集图像后设置。 |
packet size |
网络相机数据传输时,分组发送到链路上最大传输单元的大小。 |
在相机停止采集图像后设置。 |
cmos sync |
左右红外图像完全同步曝光开关。 |
在相机停止采集图像后设置。 |
trigger delay us |
延迟触发。相机收到硬件触发信号后,延时设置的延迟时间后进行图像采集,单位是微秒。 |
在相机停止采集图像后设置。 |
flash light enable |
红外泛光灯开关。红外泛光灯用于辅助红外图进行标定。 |
可实时设置。 |
深度
通用参数
参数名 |
描述 |
设置条件 |
|---|---|---|
image mode |
深度图的图像格式+分辨率 |
在相机停止采集图像后设置。 |
Fill Hole |
填洞功能,可优化深度图。 |
可实时设置。 |
Remove Ouliter |
降噪功能,可优化深度图。 |
可实时设置。 |
Time Domain Filtering |
时域滤波,可优化深度图。 |
可实时设置。 |
ToF 系列
仅 ToF 系列相机支持以下参数。
参数名 |
描述 |
设置条件 |
|---|---|---|
HDR ratio |
ToF 高动态范围比,可优化高对比度场景的深度成像效果。 |
可实时设置。 |
tof jitter threshold |
ToF 抖动滤波。 |
|
depth quality |
ToF 深度图质量 |
在相机停止采集图像后设置。 |
filter threshold |
ToF 抖动滤波。 |
|
tof channel |
ToF 调制频道。 |
在相机停止采集图像后设置。 |
tof modulation threshold |
ToF 激光调制光强。 |
可实时设置。 |
SGBM 参数
仅带 SGBM 算法的相机支持以下参数。
参数名 |
描述 |
设置条件 |
|---|---|---|
scale unit |
设置深度图中像素值的单位。 |
可实时设置。 |
disparity num |
设置视差搜索范围。 |
可实时设置。 |
disparity offset |
设置开始搜索的视差值。 |
可实时设置。 |
match window height |
设置视差匹配窗口的高。 |
可实时设置。 |
match window width |
设置视差匹配窗口的宽。 |
可实时设置。 |
image number |
设置用于深度计算的 IR 图像数量。 |
可实时设置。 |
semi global param p1 |
设置相邻像素 (+/-1) 约束惩罚参数 P1。 |
可实时设置。 |
semi global param p2 |
设置周围像素约束惩罚参数 P2。 |
可实时设置。 |
semi global param p1 scale |
设置相邻像素 (+/-1) 约束惩罚参数 P1_scale。 |
可实时设置。 |
enable half window size |
搜索滤波开关。 |
可实时设置。 |
uniqueness factor param |
设置唯一性检查参数 1,即最优匹配点与次优匹配点的百分比。 |
可实时设置。 |
uniqueness min absolute diff |
设置唯一性检查参数 2,即最优匹配点与次优匹配点差值的绝对值。 |
可实时设置。 |
enable LRC |
左右一致性检查开关。 |
可实时设置。 |
enable median filter |
中值滤波开关。用于消除孤立的噪声点,同时尽可能地保留图像的边缘信息。 |
可实时设置。 |
彩色
参数名 |
描述 |
设置条件 |
|---|---|---|
image mode |
彩色图的图像格式+分辨率 |
在相机停止采集图像后可设置。 |
auto exposure |
自动曝光时间 |
可实时设置。仅部分型号相机支持。 |
exposure time |
曝光时间。 |
可实时设置。 |
auto gain |
自动增益 |
可实时设置。仅部分型号相机支持。 |
gain |
增益 |
可实时设置。 |
auto white balance |
自动白平衡 |
可实时设置。仅部分型号相机支持。 |
Struct AEC ROI |
自动曝光时间 ROI。根据 ROI 区域自动调节整幅彩色图的曝光时间。 |
在相机开始采集图像后可设置,并且使用 Struct AEC ROI 前需确保 auto exposure 功能已启用。仅部分型号相机支持。 |
Auto ISP |
软件 ISP,在软件层面上将存在偏色的 RAW BAYER 图像处理成正常色彩空间的彩色图。 |
在相机停止采集图像后可设置。 |
Undistort EN |
畸变校正开关 |
可实时设置。 |
红外
参数名 |
描述 |
设置条件 |
|---|---|---|
image mode |
红外图的图像格式+分辨率 |
在相机停止采集图像后可设置。 |
exposure time |
曝光时间 |
可实时设置。 |
gain |
数字增益 |
可实时设置。 |
analog gain |
模拟增益 |
可实时设置。 |
undistort |
红外图的畸变校正开关 |
在相机停止采集图像后可设置。 |
hdr |
该功能用于优化高对比度场景的深度成像效果,需配合红外曝光时间使用。 |
可实时设置。 |
激光
参数名 |
描述 |
设置条件 |
|---|---|---|
power |
激光强度 |
可实时设置。 |
auto ctrl |
激光器自动调整功能开关。 勾选 “auto ctrl”后,激光器仅在采集深度图时开启; 取消勾选 “auto ctrl”后,激光器在采集任何图像时都会开启。 |
在相机停止采集图像后可设置。 |