Python (Linux 平台)
下载 Camport Multi_language SDK
选择以下任意方式,下载 Camport Multi_language SDK:
使用浏览器下载:https://gitee.com/percipioxyz/camport3_multi_language.git。
使用 git 指令获取本地副本:打开终端,切换到需存放 SDK 的工作目录下,输入 git clone 命令克隆远程仓库。
git clone https://gitee.com/percipioxyz/camport3_multi_language.git
选择以下任意方式,下载 Camport Multi_language SDK:
使用浏览器下载:https://github.com/percipioxyz/camport3_multi_language.git。
使用 git 指令获取本地副本:打开终端,切换到需存放 SDK 的工作目录下,输入 git clone 命令克隆远程仓库。
git clone https://github.com/percipioxyz/camport3_multi_language.git
示例程序说明
示例程序存放在开发包根目录 python 文件夹内,具体示例程序说明见:Python 示例程序列表。
安装依赖
安装 python。
sudo apt install python3
备注
推荐安装 Python 3.8 版本(此版本经测试 100% 兼容支持,其他版本未经测试,不保证兼容性)。
安装 NumPy 和 OpenCV
pip install numpy pip install opencv-python
安装 SWIG
下载 SWIG 源码 至本地。
解压后切换至源码目录,依次执行以下命令:
./configure make sudo make install
备注
推荐安装 SWIG 4.0.2 版本(此版本经测试 100% 兼容支持,其他版本未经测试,不保证兼容性)。
编译
按照以下步骤,编译示例代码:
打开 “camport3_multi_language” 目录下
CMakeLists.txt,修改编译目标语言(PYTHON)、PYTHON 版本,如下图所示: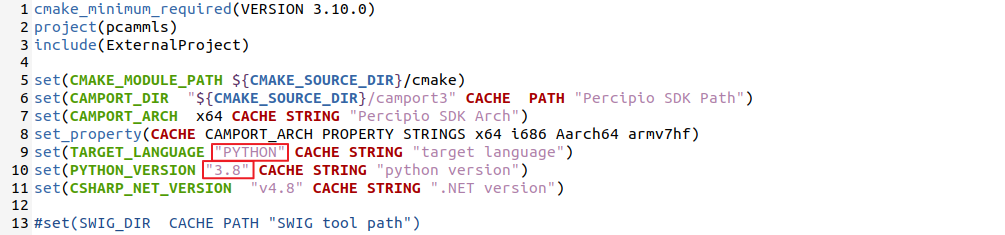
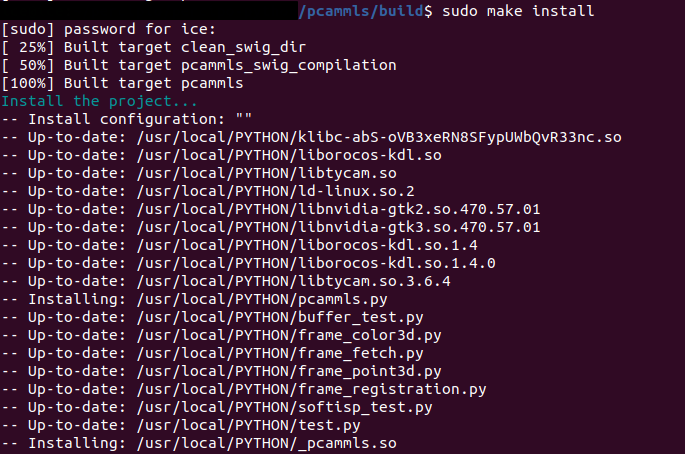
在 “camport3_multi_language” 目录下打开终端并依次执行以下命令:
mkdir build cd build cmake .. make sudo make install
在 “camport3_multi_language/camport3” 目录下打开终端并执行以下命令:
sudo cp lib/linux/lib_x64/libtycam.so* /usr/lib/
编译后,根据界面提示切换至目录 “/usr/local/PYTHON” 并运行生成的 python 文件即可。