参数说明
本部分将详细介绍 Percipio Viewer 软件支持的所有图像调试功能参数,以便更好地理解和使用该软件。
Device
以下对深度相机设备组件下各属性的设置说明。
TriggerMode
在所有数据流处于 ![]() 时,根据实际需求设置 TriggerMode。
关于 TriggerMode 的说明,请参见 采集图像。
时,根据实际需求设置 TriggerMode。
关于 TriggerMode 的说明,请参见 采集图像。
Light Source
以下是用于调试相机光源的功能。
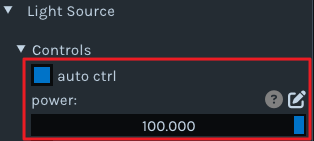
Auto Ctrl/Power 激光自动控制/强度设置
该部分参数主要用于开关激光器,调节激光器的亮度。
在所有数据流处于 ![]() 时,根据实际需求设置 auto ctrl,再打开数据流。
power 用于设置激光器亮度,设定值越大,激光器越亮。
时,根据实际需求设置 auto ctrl,再打开数据流。
power 用于设置激光器亮度,设定值越大,激光器越亮。
激光器调试功能
备注
相机激光器启停规则详见:激光器设置。
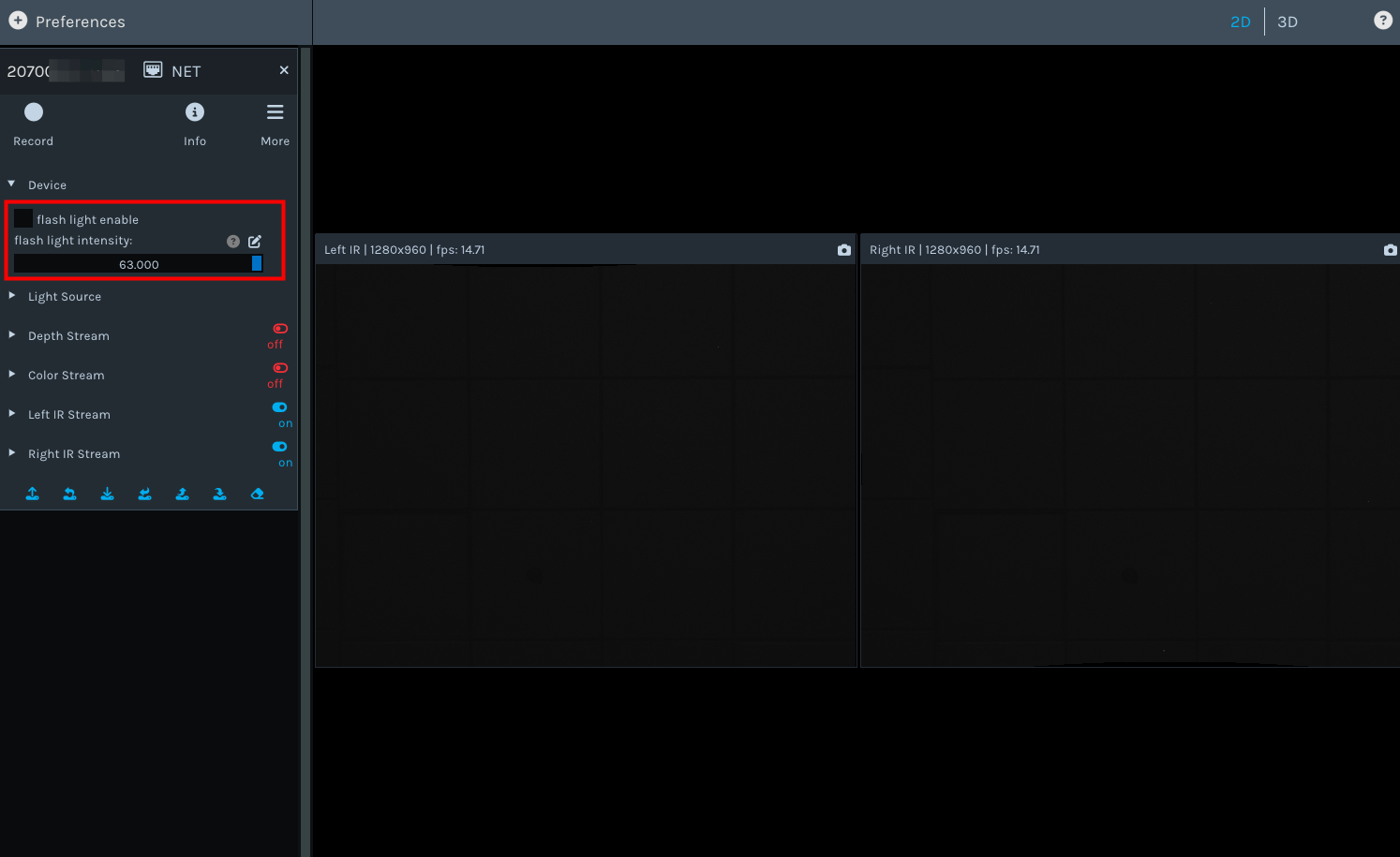
Flashlight 泛光
该功能用于辅助相机在线动态标定。
在 Left IR Stream 和 Right IR Stream 处于 ![]() 时,选中 ir flashlight enable,并根据实际需求设置泛光灯亮度 ir flashlight intensity。
时,选中 ir flashlight enable,并根据实际需求设置泛光灯亮度 ir flashlight intensity。
备注
在 Percipio Viewer 和 Camport SDK 中, 使用 "Flashlight" 指代泛光灯。 泛光灯启停规则详见 泛光设置。
Depth Stream
Controls
SGBM 参数
根据深度图实时调整 SGBM 参数,以优化相机的测距范围、精度、帧率以及深度图像后处理。部分相机支持 SGBM 参数。
备注
SGBM 参数的可见级别为 Expert 和 Guru,调试前请点击 ![]() > API level > Expert/Guru,调出 SGBM 参数。
> API level > Expert/Guru,调出 SGBM 参数。
测距性能相关
scale unit 设置深度图中像素值的单位。
深度数据可表示最大值 = 65536 * scale unit。
设定值越小,深度计算的精度越高,但设定值过小可能会导致深度计算出现误差。
disparity num
设置视差搜索范围。
设定值越大,相机 Z 方向的测量范围越大,但算力会增加。建议设置成 16 的整数倍。
disparity offset
设置开始搜索的视差值。
设定值越小,Z方向最大测量值(Zmax)越大,即测量范围越远,但设定值下限受景深影响。
match window height
设置视差匹配窗口的高。
设定值必须为奇数。
match window width
设置视差匹配窗口的宽。
设定值必须为奇数。
视差匹配窗口(match window height * match window width)越大,深度图更加平滑,但是精度会降低。视差匹配窗口越小,深度图显示更多细节,但是出现错误匹配的几率越大。
image number
设置用于深度计算的 IR 图像数量。
设定值越大,输出深度图像质量越好,帧率越小。
备注
受相机算力的影响,image number 和 match window height 之间存在一个约束,即 (image number+1) / 2 * match window height < 48。
边缘平滑相关
semi global param p1
设置相邻像素 (+/-1) 约束惩罚参数 P1。
设定值越大,深度图越平滑。
防止出现不连续或不合理的深度值,有效抑制噪声和不连续性。
semi global param p1 scale
设置相邻像素 (+/-1) 约束惩罚参数 P1_scale。
设定值越小,深度图越平滑。
semi global param p2
设置周围像素约束惩罚参数 P2。
设定值越大,深度图越平滑。P2 > P1。
该参数可以有效地处理纹理丰富区域,减少误匹配的数量。
enable half window size
搜索滤波开关。
用于进一步优化深度图,去除噪声和不连续性,对物体边缘点云更友好。
误匹配相关
uniqueness factor param
设置唯一性检查参数 1,即最优匹配点与次优匹配点的百分比。
设定值越大,匹配代价越唯一,错误匹配点过滤掉的越多。
uniqueness min absolute diff
设置唯一性检查参数 2,即最优匹配点与次优匹配点差值的绝对值。
设定值越大,匹配代价越唯一,错误匹配点过滤掉的越多。
enable LRC
左右一致性检查开关。
开启 enable LRC 后,调节参数 max LRC diff。
在进行立体匹配时,对于同一物体表面上的像素,左图匹配右图的视差为 LR,右图匹配左图的视差为 RL。当 ABS(LR-RL) < max LRC diff 时,则认为该点是可信匹配点。
max LRC diff 设定值越小,匹配结果越可靠。
中值滤波
enable median filter
中值滤波开关。用于消除孤立的噪声点,同时尽可能地保留图像的边缘信息。
开启 enable median filter 后,调节参数 median filter thresh。
median filter thresh 设定值越大,过滤的噪点越多,但也可能会导致深度图的细节信息丢失。
ToF 相关参数
以下是 ToF 系列特有的图像调试功能,只有用 Percipio Viewer 打开了该系列的相机,才可在界面中设置。
ToF 系列图像调试功能
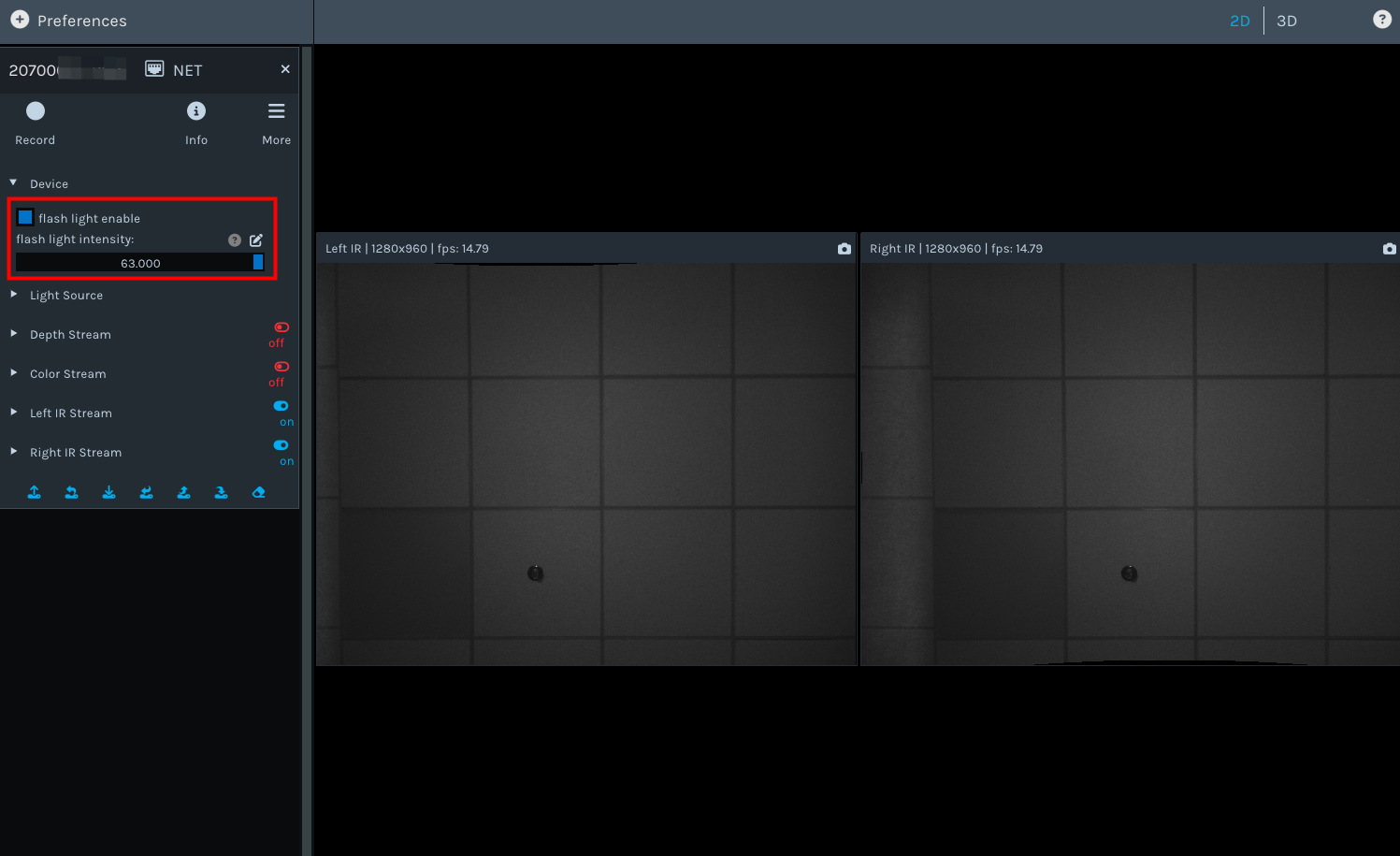
Depth Quality 深度质量
该功能用于设置相机输出的深度图质量,为适应不同应用的需求。
在所有数据流处于 ![]() 时,根据实际需求设置 depth quality,再打开数据流。
时,根据实际需求设置 depth quality,再打开数据流。
basic:深度值抖动幅度大,输出帧率高。
medium:深度值抖动幅度中等,输出帧率中等。
high:深度值抖动幅度小,输出帧率低。
depth quality basic
depth quality medium
depth quality high
ToF Channel 调制频道
该功能用于设置 ToF 深度相机调制频道。不同调制频道的调制频率不同,互不干扰。
在所有数据流处于 ![]() 时,设置 tof channel,确保同一场景下同系列 ToF 相机的调制频道不同。
时,设置 tof channel,确保同一场景下同系列 ToF 相机的调制频道不同。
ToF Modulation Threshold 激光调制光强
该功能用于设置 ToF 深度相机接收激光调制光强的阈值,小于此阈值的像素点不参与计算深度,即像素点的深度值赋值为 0。
在 Depth Stream 处于 ![]() 时,根据深度图实时调整 tof modulation threshold。
时,根据深度图实时调整 tof modulation threshold。
ToF Jitter Threshold 抖动过滤
该功能用于设置 ToF 深度相机的抖动过滤阈值。阈值设置值越大,深度图边缘抖动的深度数据过滤得越少。
在 Depth Stream 处于 ![]() 时,根据深度图实时调整 tof jitter threshold,过滤边缘抖动的像素点。
时,根据深度图实时调整 tof jitter threshold,过滤边缘抖动的像素点。
Filter Threshold 飞点滤波
该功能用于设置 ToF 深度相机的飞点滤波阈值。滤波阈值设置越小,过滤的飞点越多。
在 Depth Stream 处于 ![]() 时,根据深度图实时调整 filter threshold,过滤飞点。
时,根据深度图实时调整 filter threshold,过滤飞点。
HDR Ratio 高动态范围比
该功能用于优化高对比度场景的深度成像效果。
按照以下步骤,设置 HDR Ratio:
在所有数据流处于
 时,将 depth quality 设置为 high。
时,将 depth quality 设置为 high。在 Depth Stream 处于
 时,根据深度图实时调整 HDR ratio。
时,根据深度图实时调整 HDR ratio。
ToF Anti-sunlight Index 抗阳光指数
该功能用于优化 ToF 相机在阳光下的深度成像效果。
在所有数据流处于 ![]() 时,调整 tof anti-sunlight index。
时,调整 tof anti-sunlight index。
若在室内场景或阳光较弱时,建议将该指数设置为 0;在室外场景或有一定阳光时,设置为 1 或 2。
Max Speckle Size/Diff 斑点滤波器设置
该功能用于处理 ToF 相机深度图像中的斑点,相邻像素的深度差值小于 Max speckle diff 聚类阈值,则该相邻像素属于同一个聚类斑点;聚类斑点面积小于 Max speckle size 面积阈值的聚类斑点会被滤除。
在 Depth Stream 处于 ![]() 时,根据深度图实时调整 max speckle size,面积阈值设置越大,滤除的聚类斑点越多。
时,根据深度图实时调整 max speckle size,面积阈值设置越大,滤除的聚类斑点越多。
在 Depth Stream 处于 ![]() 时,根据深度图实时调整 max speckle diff,聚类阈值设置越大,相邻像素属于同一聚类斑点越多。
时,根据深度图实时调整 max speckle diff,聚类阈值设置越大,相邻像素属于同一聚类斑点越多。
ToF Anti-interference 抗多机干扰
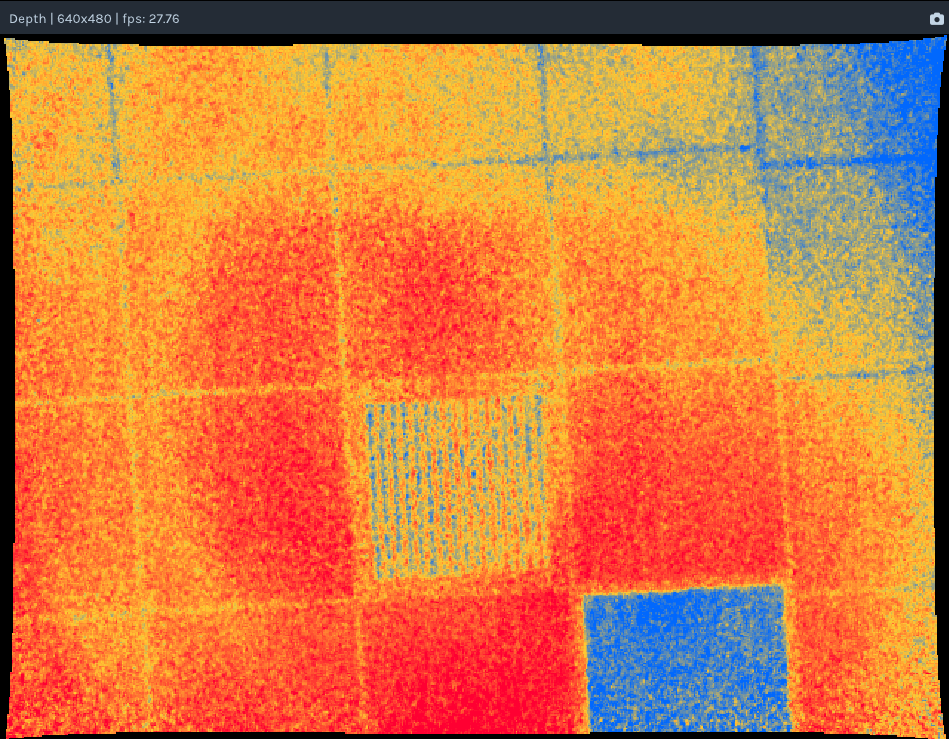
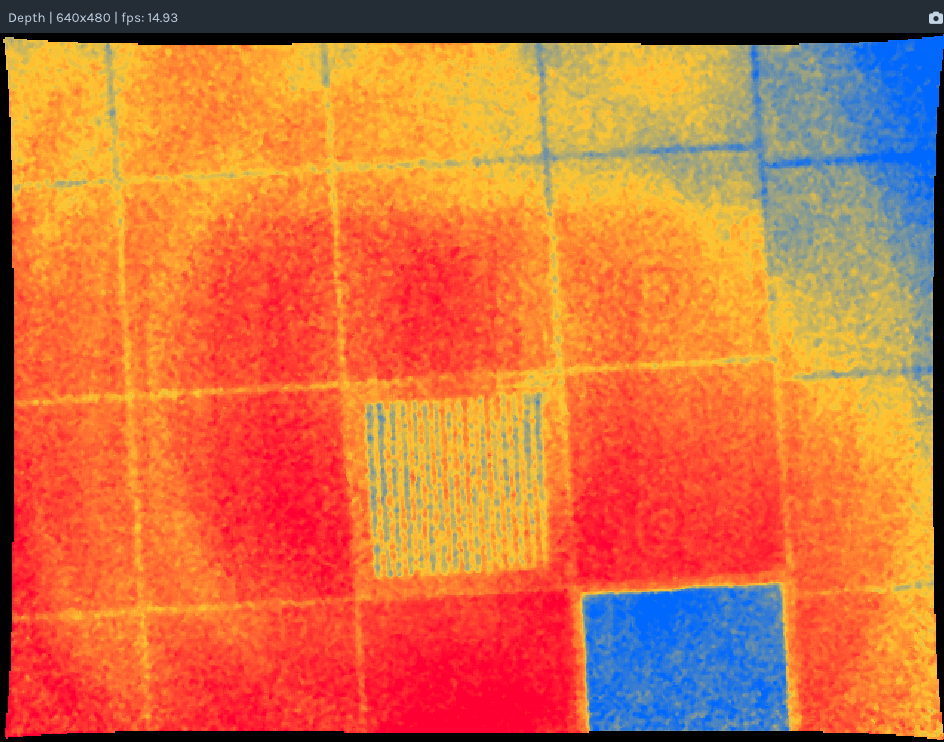
该功能用于过滤多台相机共存于同一场景中并且在同一调制频道(ToF Channel),由于信号相互干扰引发的异常深度值,见下图。
多机干扰
在 Depth Stream 处于 ![]() 时,勾选 tof anti-interference。
时,勾选 tof anti-interference。
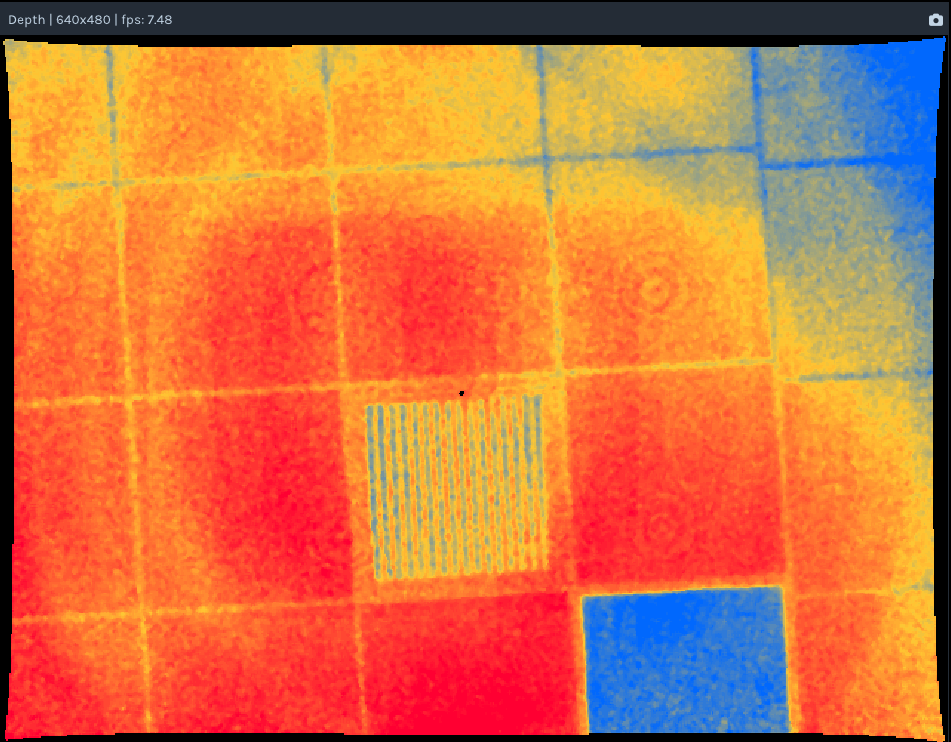
抗多机干扰的效果图
Depth Visualization
以下是软件层面对深度图渲染的色彩配置功能。
Color Scheme 色彩配置
在 Depth Stream 处于 ![]() 时,设置 Color Scheme。
时,设置 Color Scheme。
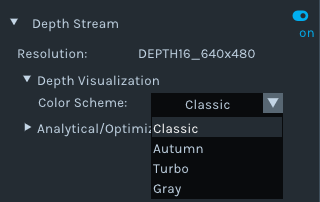
色彩配置功能
支持 Classic、Autumn、Turbo、 Gray 四种色彩方案间切换,用以渲染深度图,提升视觉体验。
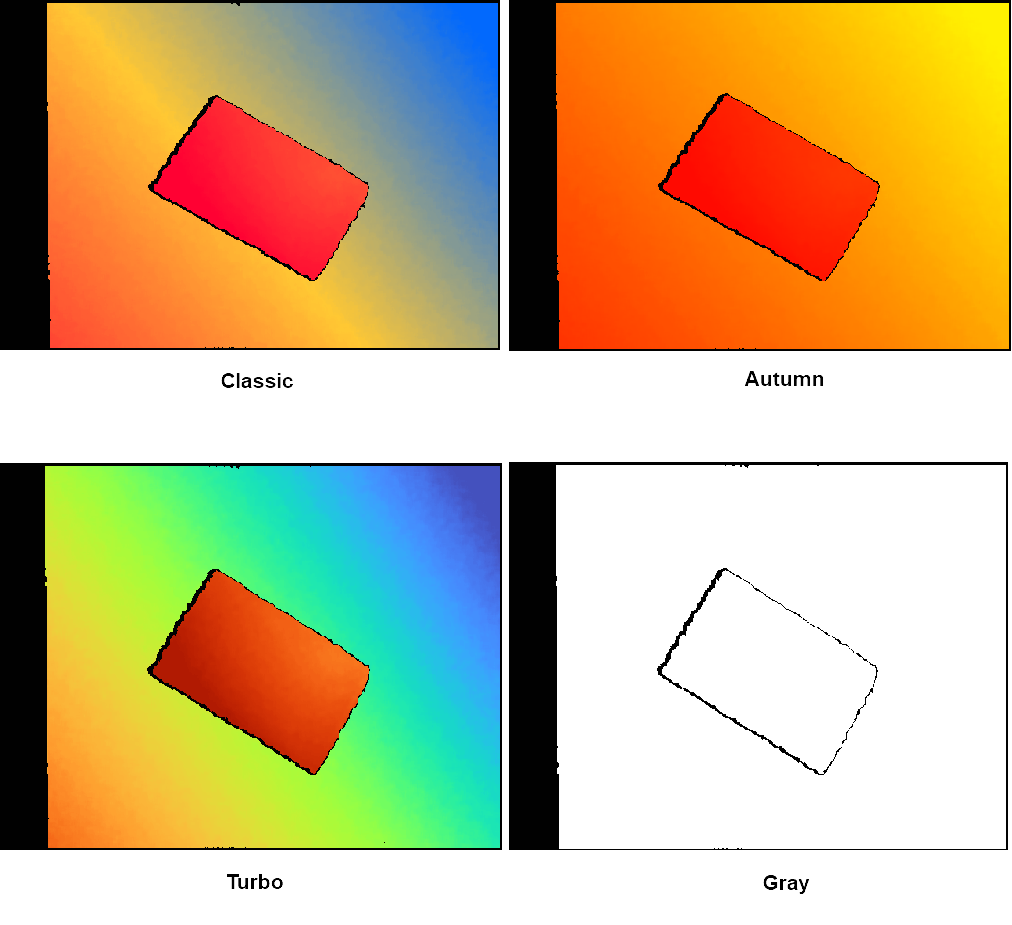
四种色彩方案效果图
Analytical/Optimize
以下是软件层面对深度图和点云图的质量评估及后处理功能。
Analytical Type 分析类型
该功能是软件层面对于深度图的数据分析。
在 Depth Stream 处于 ![]() 时,设置 Analytical Type。
时,设置 Analytical Type。
选择 single pixel,深度视图左下角实时显示以下信息:
Depth of center :深度图中心点的深度值。
Depth of (X,Y) :鼠标所指点的深度值。

single pixel
选择 rectangle area,鼠标左键在深度图上拖拉,框选出感兴趣的区域 ROI 后,深度视图左下角实时显示以下信息:
Mean distance of ROI(x1 y1 x2 y2):ROI 区域内所有深度值的平均值。
Fit plane distance of ROI(x1 y1 x2 y2):相机光心到ROI拟合平面的深度距离。
Planarity of ROI(x1 y1 x2 y2):ROI 区域平面度。ROI 区域内的深度值越平整,Planarity 值越小。

rectangle area
Fill Hole 填洞功能
该功能软件层面的后处理,可填补缺失的深度数据。该功能结合 Remove Outlier 降噪功能一起使用,能获得成图效果最佳的深度图。
在 Depth Stream 处于 ![]() 时,选中 Fill Hole,并根据深度图调节参数 k Size 和 h Size。
时,选中 Fill Hole,并根据深度图调节参数 k Size 和 h Size。
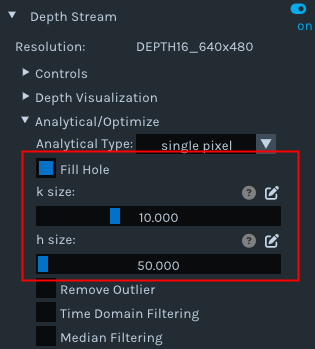
Fill Hole 填洞功能
备注
若 k Size 和 h Size 的参数值设置太大,可能会出现深度图失真的现象。
Remove Outlier 降噪功能
该功能软件层面对于点云的后处理,可减少点云图中的飞点和错误匹配点。
在 Depth Stream 处于 ![]() 时,选中 Remove Outlier,并根据深度图调节参数 spk size、 spk diff 。
时,选中 Remove Outlier,并根据深度图调节参数 spk size、 spk diff 。
若区域中的点云个数小于 spk size 设定值,则将该区域的点云视为飞点并去除。若区域中相邻像素的深度差值小于 spk diff 设定值,则区域内相邻像素属于同一个飞点。
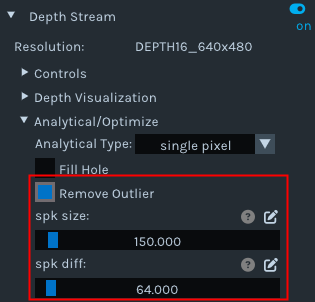
Remove Outlier 降噪功能
Time Domain Filtering 时域滤波功能
该功能是软件层面对于点云的后处理,将多帧数据均值化处理,以去除噪声和平滑点云。
在 Depth Stream 处于 ![]() 时,选中 Time Domain Filtering,并根据点云图调节参数 time-domain frame count。
时,选中 Time Domain Filtering,并根据点云图调节参数 time-domain frame count。
参数 time-domain frame count 设定值越大,得到的深度值抖动幅度越小,点云越平滑。

Time Domain Filtering 时域滤波功能
Median Filtering 中值滤波功能
该功能是软件层面对于点云的后处理,可消除孤立的噪声点,同时尽可能地保留图像的边缘信息。
在 Depth Stream 处于 ![]() 时,选中 Median Filtering,并根据点云图调节参数 Ksize。
时,选中 Median Filtering,并根据点云图调节参数 Ksize。
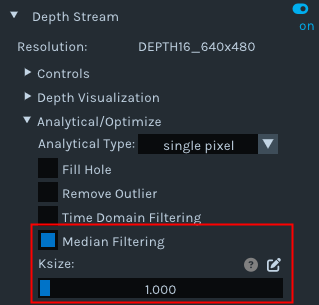
Median Filtering 中值滤波功能
Color Stream
Controls
以下是用于调试彩色图的曝光度、亮度水平和动态范围的功能。
Analog Gain 模拟增益
该参数可调控图像传感器的模拟增益,优化图像质量,平衡亮度与细节,减少不必要的噪声。
在 Color Stream 处于 ![]() 时,根据图像实时设置 analog gain ,设定值越大,图像亮度越高,噪声越大。
时,根据图像实时设置 analog gain ,设定值越大,图像亮度越高,噪声越大。
R/G/B Gain R/G/B 增益
该部分参数用于调节图像中红色、绿色、蓝色通道强度,以实现颜色的平衡和校正。
在 Color Stream 处于 ![]() 时, 根据彩色图实时调整参数。
r gain 设定值越大,彩色图像越红。 g gain 设定值越大,彩色图像越绿。 b gain 设定值越大,彩色图像越蓝。
时, 根据彩色图实时调整参数。
r gain 设定值越大,彩色图像越红。 g gain 设定值越大,彩色图像越绿。 b gain 设定值越大,彩色图像越蓝。
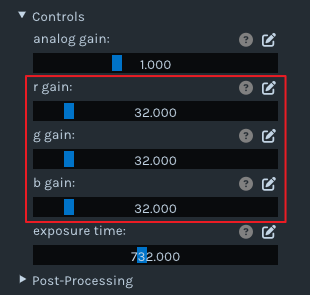
r/g/b gain 调试功能
备注
设置 r、g、b 三个通道的增益,需先关闭 RgbAWB (自动白平衡)功能,否则自动白平衡功能会与手动设置的 r、g、b 通道增益冲突,影响图像效果。
Exposure Time 曝光时间
该功能可调控图像传感器的曝光时间,从而影响图像的亮度与清晰度。
在 Color Stream 处于 ![]() 时,根据图像实时设置 exposure time ,设定值越大,图像亮度越高。
时,根据图像实时设置 exposure time ,设定值越大,图像亮度越高。
AETargetLuminance 自动曝光目标亮度
该功能通过设定图像的理想亮度水平,以优化高对比度场景下的彩色图像效果。
在 Color Stream 处于 ![]() 时, 根据彩色图实时调整 AETargetLuminance ,设定值越大,图像亮度越高。
时, 根据彩色图实时调整 AETargetLuminance ,设定值越大,图像亮度越高。

AETargetLuminance 调试功能
RgbAutoExpo 彩色图自动曝光
该功能可以根据图像亮度动态调整彩色图像曝光时间和增益,从而避免图像过曝或欠曝。
在 Color Stream 处于 ![]() 时,勾选 RgbAutoExpo 。
时,勾选 RgbAutoExpo 。

设置自动曝光的效果图
Struct Aec roi 自动曝光 ROI
该功能可以根据图像中感兴趣区域的亮度,自动调整图像曝光时间和增益,实现更好的图像效果。
按照以下步骤,设置 struct aec roi 功能:
在 Color Stream 处于
时,选中 RgbAutoExpo。选中 struct aec roi 后,鼠标左键在彩色图上拖拉,框选出感兴趣的区域。
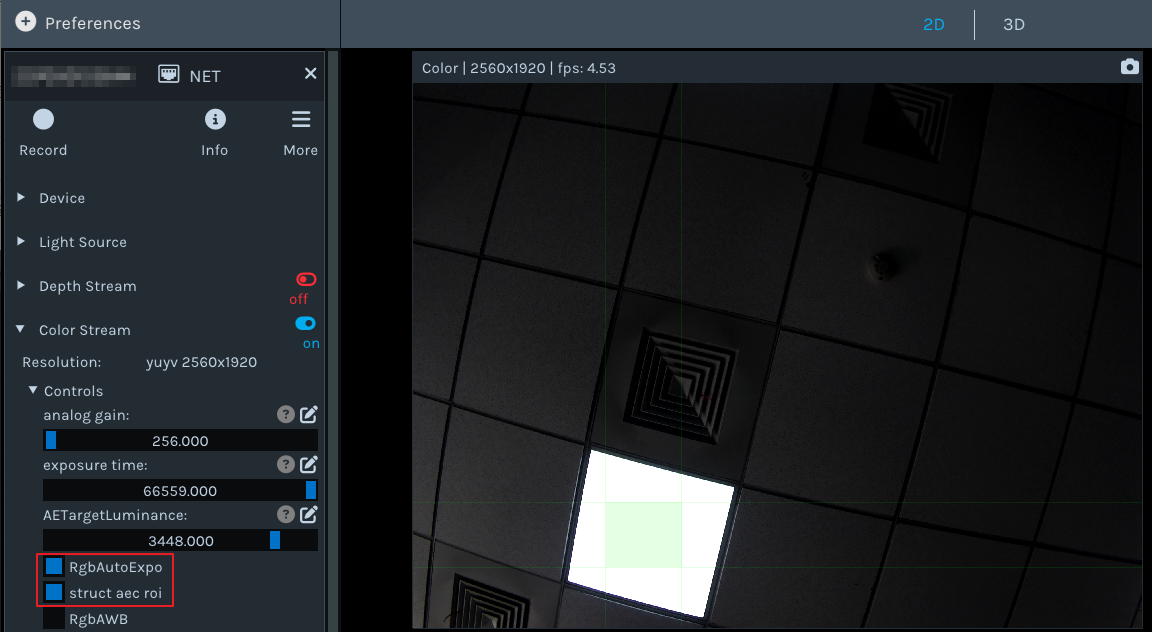
设置自动曝光 ROI 的效果图
备注
该功能一旦设置成功,将持续生效。如需恢复图像的原始状态,则需重新绘制全局感兴趣区域。
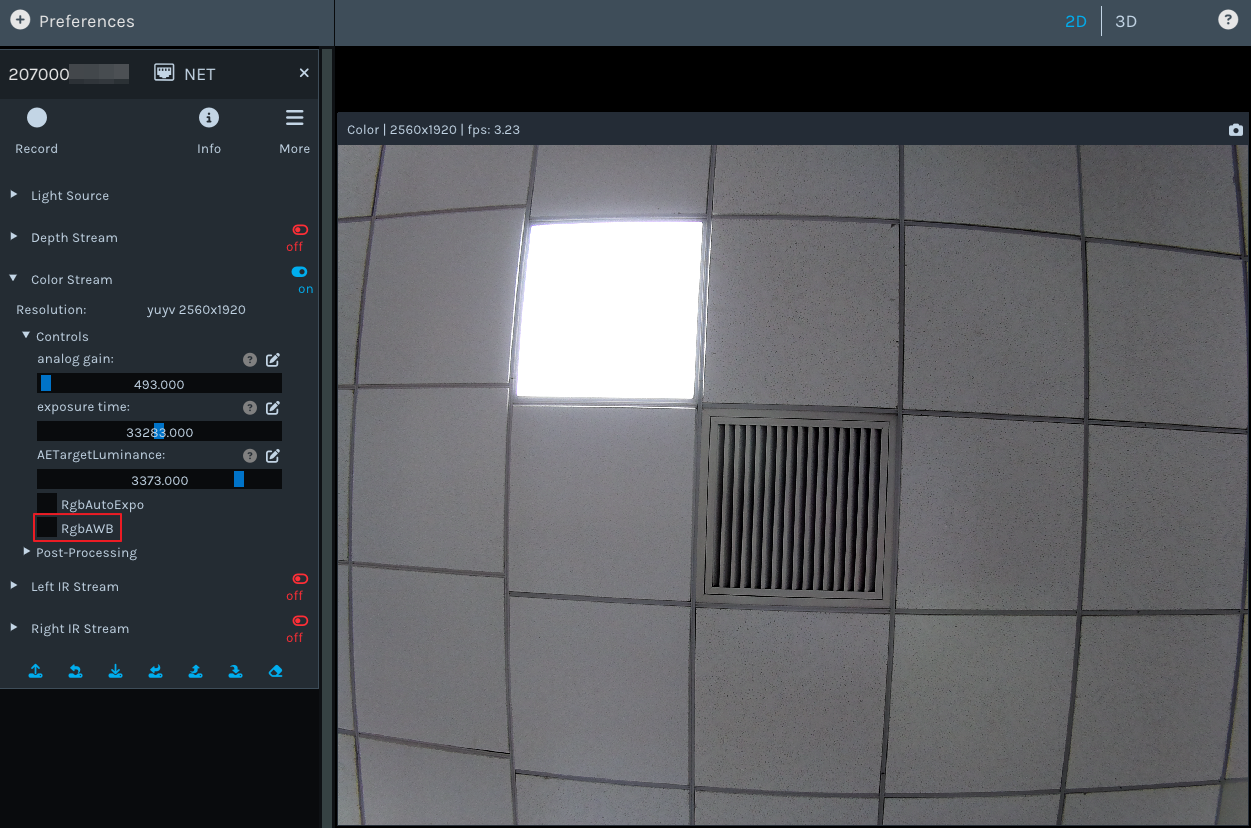
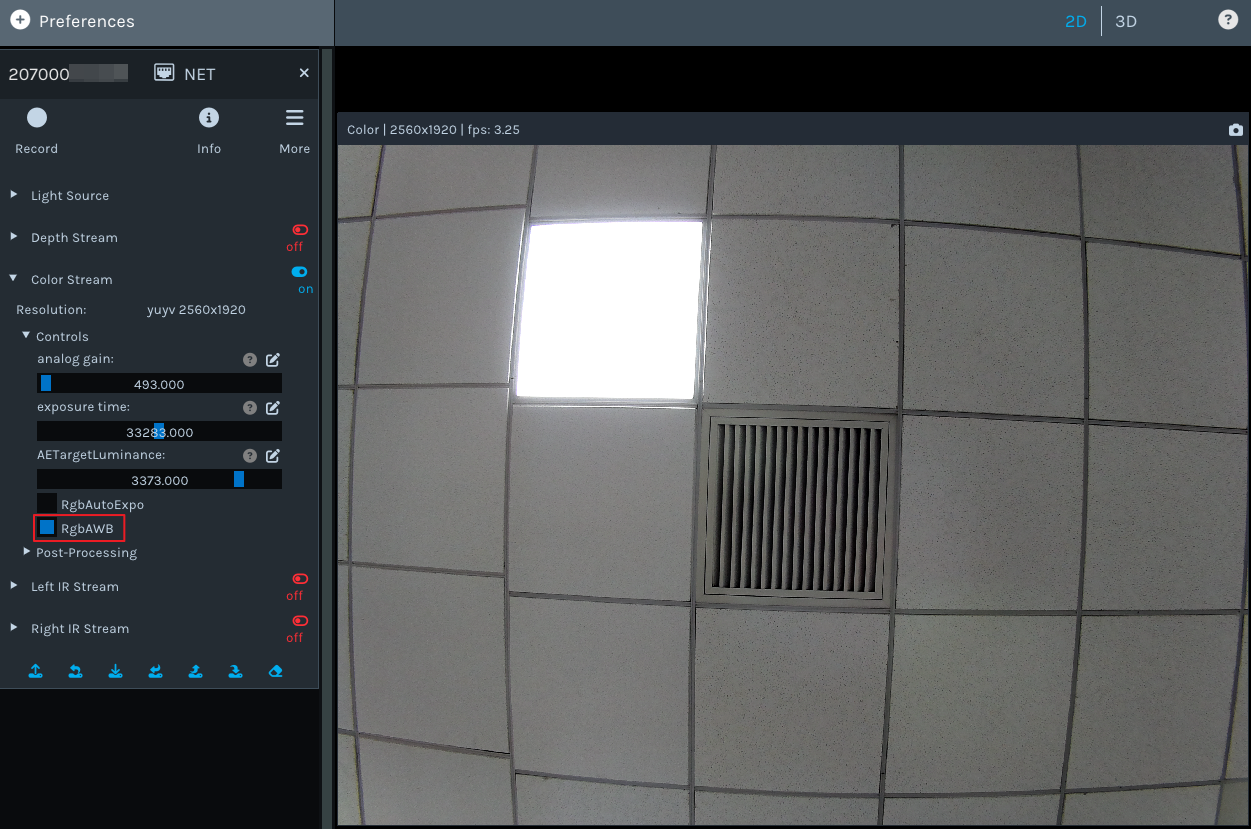
RgbAWB 自动白平衡
该功能可用于校正由不同光源引起的色彩偏差,提高图像的真实性和色彩准确度。
在 Color Stream 处于 ![]() 时,选中 RgbAWB,即开启自动白平衡。
时,选中 RgbAWB,即开启自动白平衡。
Post-Processing
以下是软件层面对彩色图的图像调试功能。
Auto ISP 功能
该功能是软件层面对于彩色图像的 ISP 后处理,可将存在偏色的 BAYER 图像处理成正常色彩空间的彩色图。
备注
带有硬件 ISP 模块的相机可输出正常色彩空间的彩色图像,无需使用 Auto ISP 功能进行后处理。
在 Color Stream 处于 ![]() 时,选中 Auto ISP ,即可对存有偏色的 BAYER 彩色图像进行修正。
时,选中 Auto ISP ,即可对存有偏色的 BAYER 彩色图像进行修正。
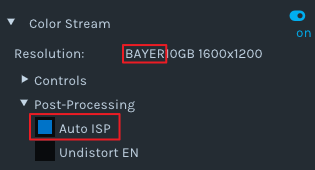
Auto ISP 功能
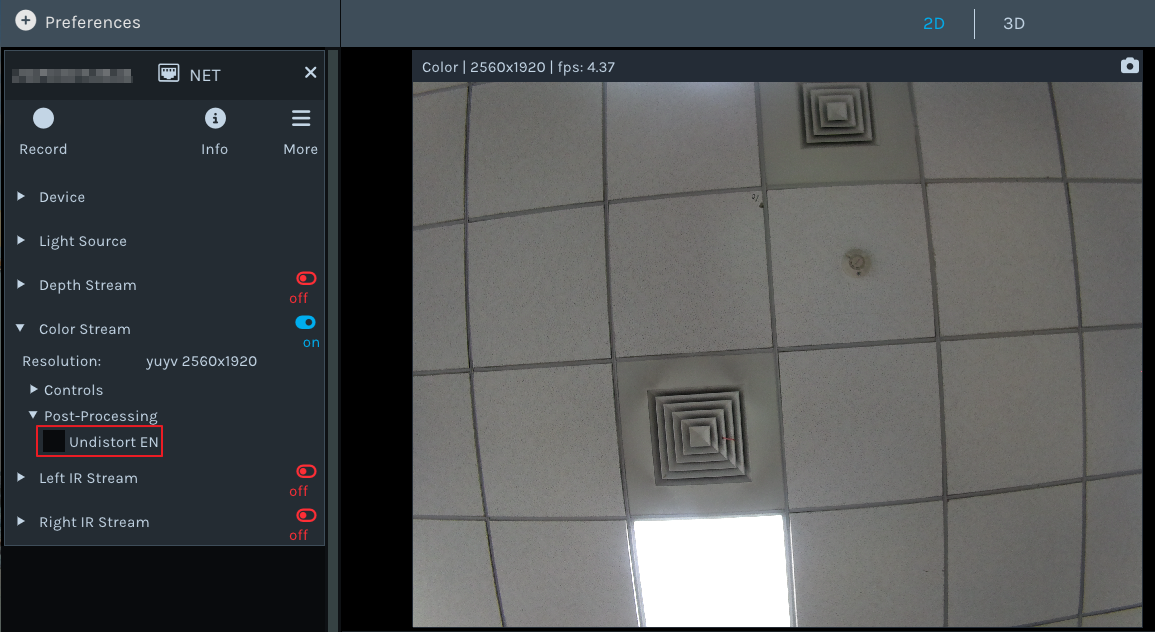
Undistort 畸变校正
该功能是软件层面对于彩色图像的后处理,可对输出的彩色图做畸变校正。
在 Color Stream 处于 ![]() 时,选中 Undistort EN,即可得到畸变校正后的彩色图。
时,选中 Undistort EN,即可得到畸变校正后的彩色图。

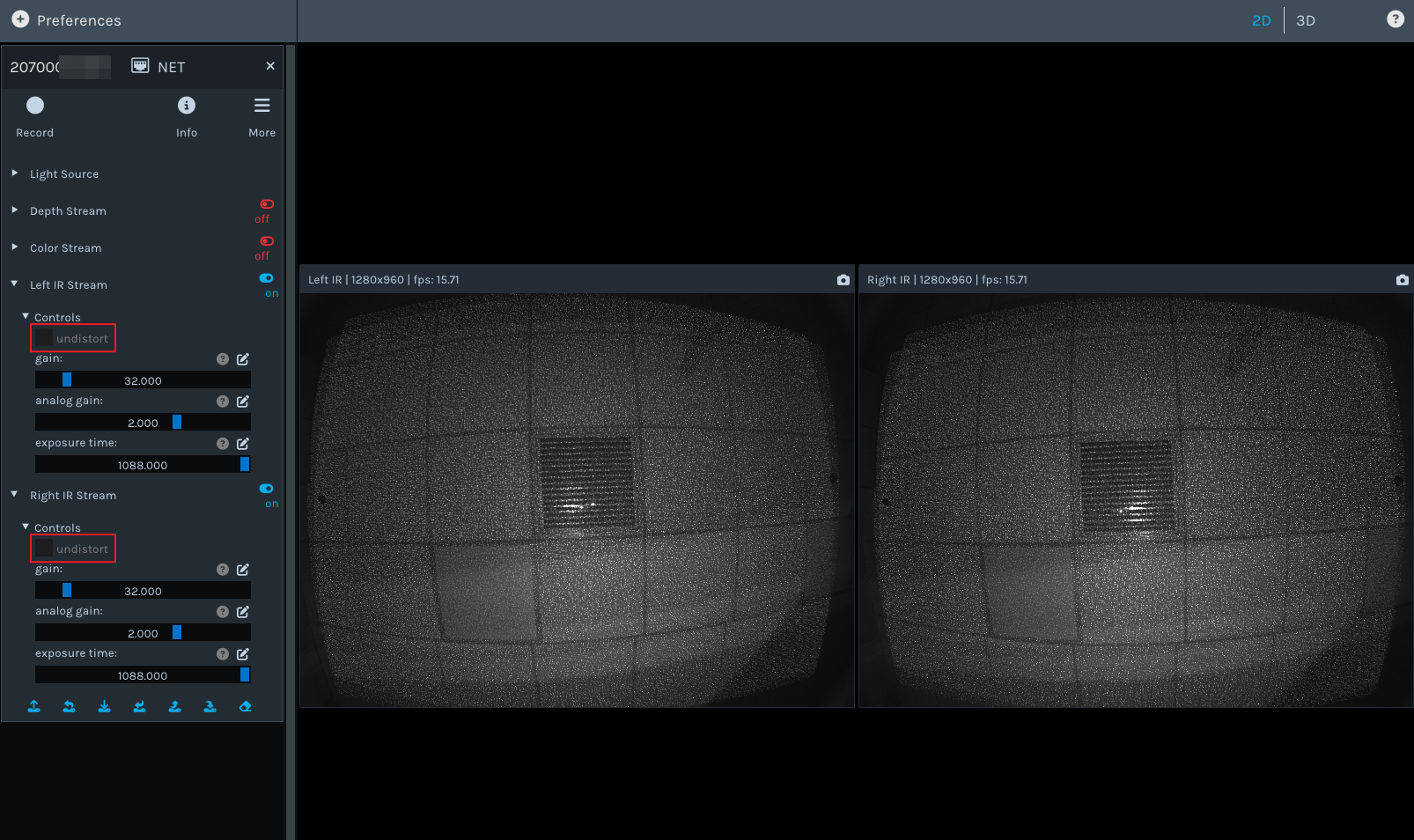
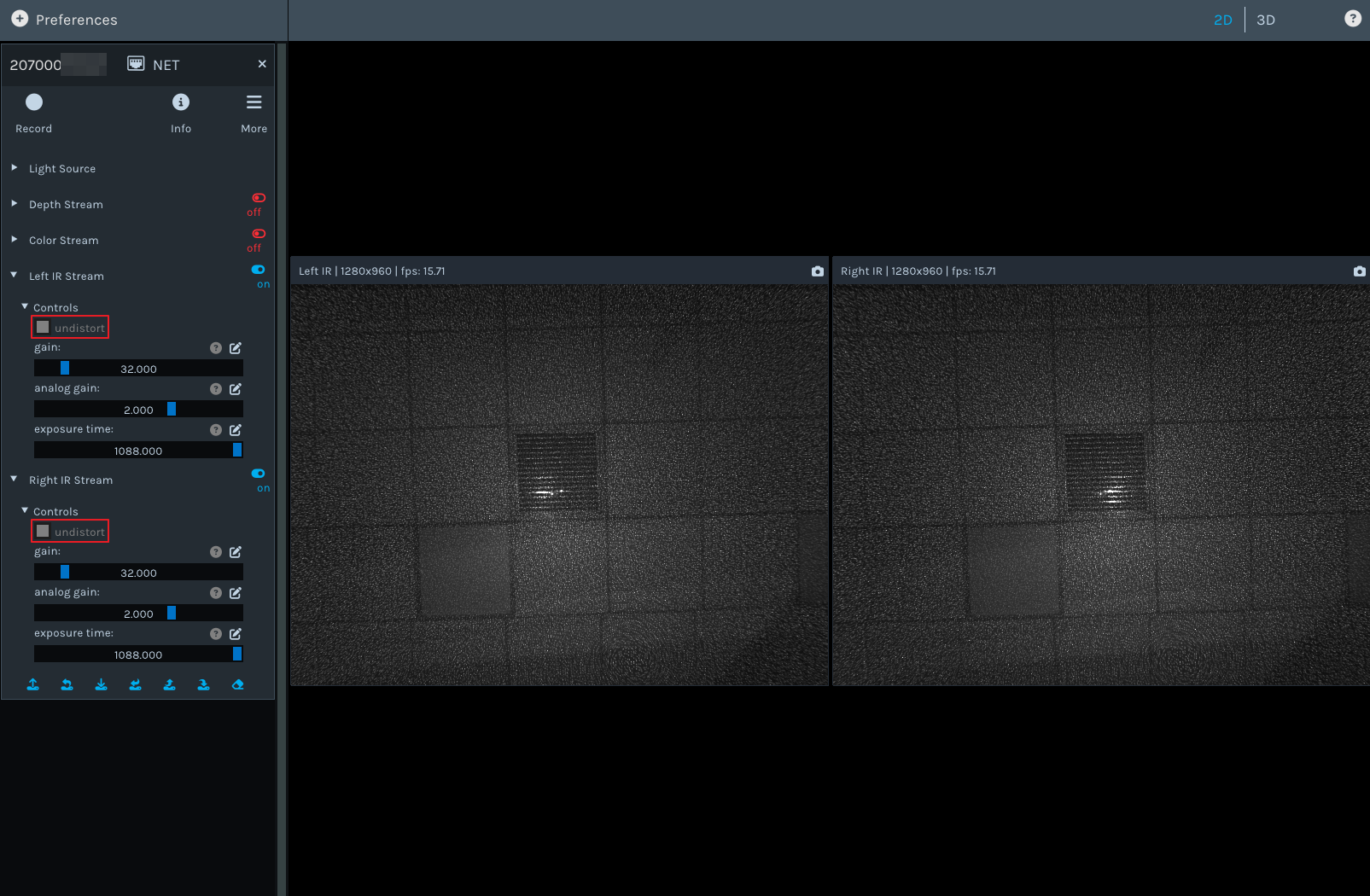
Left/Right IR Stream
undistort 畸变矫正
该功能对输出的左右灰度图做畸变校正。
在数据流处于
时,选中 Left IR Stream 或 Right IR Stream 中的 undistort。开启 Left IR Stream 或 Right IR Stream,即可得到畸变矫正后的灰度图。
Gain/Analog Gain 增益/模拟增益
该部分参数可调控图像传感器的增益,优化图像质量,平衡亮度与细节,减少不必要的噪声。
在 Left/Right IR Stream 处于 ![]() 时,根据图像实时设置 gain/analog gain ,设定值越大,图像亮度越高,噪声越大。
时,根据图像实时设置 gain/analog gain ,设定值越大,图像亮度越高,噪声越大。
备注
同时调节 Left IR 和 Right IR 的 gain、analog gain参数,以确保生成的深度图效果良好。
Exposure Time 曝光时间
该功能可调控图像传感器的曝光时间,从而影响图像的亮度与清晰度。
在 Left/Right IR Stream 处于 ![]() 时,根据图像实时设置 exposure time ,设定值越大,图像亮度越高。
时,根据图像实时设置 exposure time ,设定值越大,图像亮度越高。
备注
同时调节 Left IR 和 Right IR 的 exposure time 参数,以确保生成的深度图效果良好。
HDR 高动态范围
该功能用于优化高对比度场景的深度成像效果,设置完 HDR 参数后需要调节 Left/Right IR 的曝光时间,以获得成像效果最佳的深度图。
按照以下步骤,设置 HDR 功能:
在 Left IR Stream 和 Right IR Stream 处于
时,选中 HDR,设置 参数 1 和 参数 2,并按 Enter 键确认设置。备注
参数 1 和参数 2 的设置范围 0,1,2。

设置参数1和参数2
设置 Left IR 和 Right IR 的曝光时间 exposure time,获得最佳的深度图。

