推理服务

参数介绍
TCP 服务端口:用于指定服务器监听的端口。添加网络:MaskRCNN:用于 MaskRCNN 网络的推理,可以获得图像中目标的位置掩码(像素区域)。YOLO:用于 YOLO 网络的推理,可以获得图像中目标的位置掩码(像素区域)。KeyPoint:用于关键点网络的推理,在 MaskRCNN 网络基础上可以额外获得关键点的像素值。
MaskRCNN
模型名:训练模型名称。描述:配置的描述信息。运行设备:选择使用的设备,支持 CUDA 和 CPU。CUDA:选择 CUDA 后,可以指定使用的显卡进行推理。
分数阈值:目标得分的阈值,低于该阈值的目标将被淘汰。范围:[0,1],默认值为 0.8。模型文件:模型文件路径。
YOLO
IOU阈值:用于在目标检测中判断预测框与真实框的重叠程度,以优化检测结果的精确度和召回率。其他参数与
MaskRCNN一致。
KeyPoint
关键点分数阈值:关键点检测的得分阈值。其他参数与
MaskRCNN一致。
按钮介绍
保存:保存模型配置。开始:启动推理服务。
功能演示
本案例演示了拆垛案例中的 AI推理 模块,仅介绍 AI 推理算子与 RVS_AI_Center 的使用方法。具体的工程案例请参考自动拆垛文档进行学习。
打开 RVS_AI_Center ,配置推理服务界面参数。
TCP 服务端:2024
添加网络:MaskRCNN
模型名:拆垛
运行设备:cuda 0
分数阈值:0.8
模型文件:unstacking.mask

点击
保存按钮后,确保所有配置已正确保存。然后点击开始按钮以启动 AI 推理模块。
使用 RVS 软件加载 unstacking.xml,找到
AI推理分割点云Group 中AI推理算子,并填写以下参数:服务端 IP 地址:127.0.0.1
服务端端口号:2024
模型序号:0

点击
运行按钮点击离线触发,AI 推理算子运行成功后,在日志视图中显示推理结果。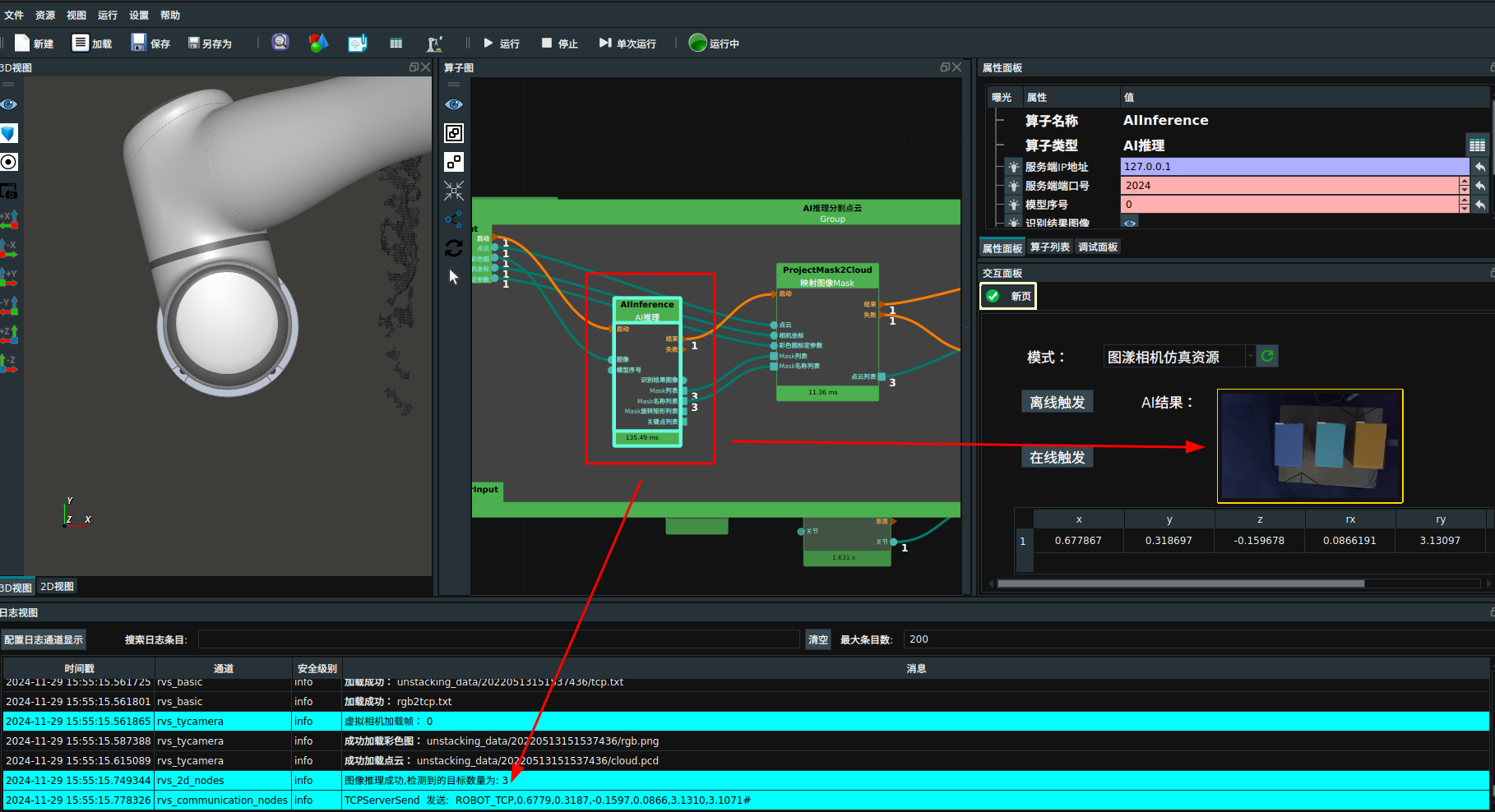
推理服务启动失败的故障排查
请确保在
AIConfig.json配置文件中,所有文件地址或文件夹路径都已正确设置,并且所需的文件或数据已放置在对应目录下,以避免路径错误导致的训练问题。检查
AIConfig.json配置文件的内容。CPU 版本的推理服务只能选择 CPU 模式,而 GPU 版本的推理服务可以支持 GPU 或 CPU。如果控制台(终端)出现 “bind: Address already in use” 错误提示,说明目标服务端口已被占用。
Windows:
通常情况下,关闭
RVS_AI_Center.exe的软件界面和控制台界面,重新启动软件并单击启动推理服务即可解决。如果问题仍未解决,请参考下面的 Linux 解决方案。
Linux:
通常情况下,关闭
RVS_AI_Center的软件界面,重新启动软件并单击启动推理服务即可解决。如果问题仍未解决,请检查当前本地端口的占用情况:
打开一个终端,当服务端口为 2024 时,使用命令
sudo lsof -i :2024。结果会显示类似如下的信息:COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAME
如果 COMMAND 栏目显示的程序名为
rvs_ai_se...,说明上次启动推理服务后未正常关闭。使用命令
sudo kill $PID强制关闭(其中 $PID 是上面信息中 PID 栏的数字)。然后重新启动推理服务。如果 COMMAND 栏目显示的程序名不是
rvs_ai_se...,说明其他应用程序占用了目标服务端口。此时,应更改
AIConfig.json中的 “TCPServerPort” 字段,例如从 2024 改为 2025,然后重新启动推理服务。