工具模型制作
当您获得本文档时,可点击下载 Tool_Data.zip 压缩包。解压后其内容应包括:
EVS01.step:工具模型 STEP 格式。EVS01.stl/EVS01.obj/EVS01.mtl:工具模型 stl、obj、mtl 格式。EVS01.tool.xml:RVS 制作工具模型 XML。
准备工具模型
在使用 RVS 制作工具模型之前需要将工具模型文件类型转换成 OBJ 。我们将会用到软件有:
NXUG:在本手册的操作中用于调整工具模型基坐标系。(Windows 版本)
blender:在本手册的操作中主要用于调整工具模型的尺寸。(Windows 版本)
点击软件下载获得以上两个软件的安装包以及配套的安装说明,按照安装说明进行安装即可。
一. 调整工具模型基坐标系
打开 NXUG 软件,点击菜单栏
文件→打开。在打开窗口中设置文件类型为所有文件,选择模型所在目录,鼠标双击要打开的数模文件。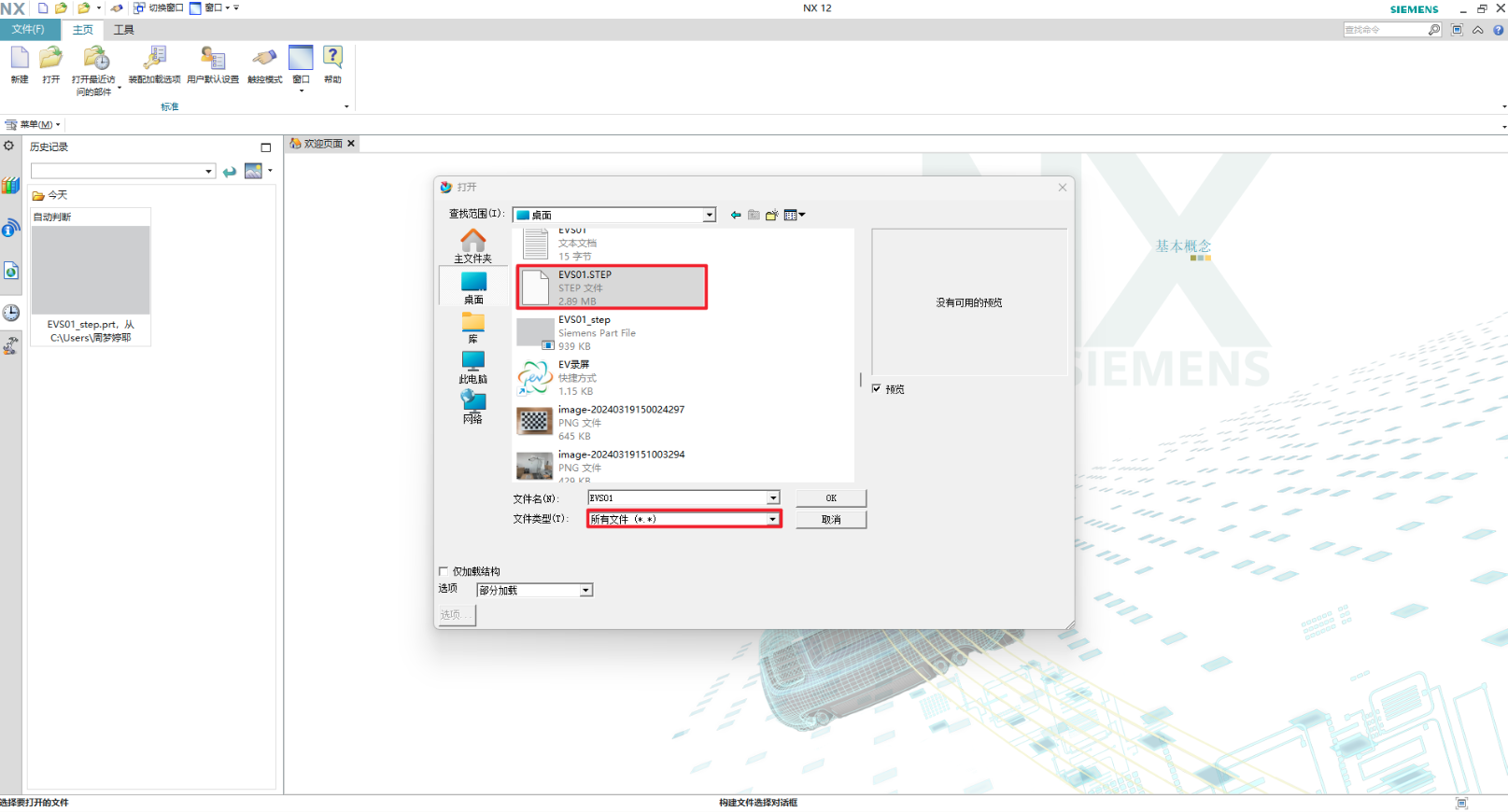
在加载工具模型后,鼠标右键点击 3D 视图并选择
适合窗口。如果工具模型中有不需要的部分,使用鼠标左键按住Delete将其删除。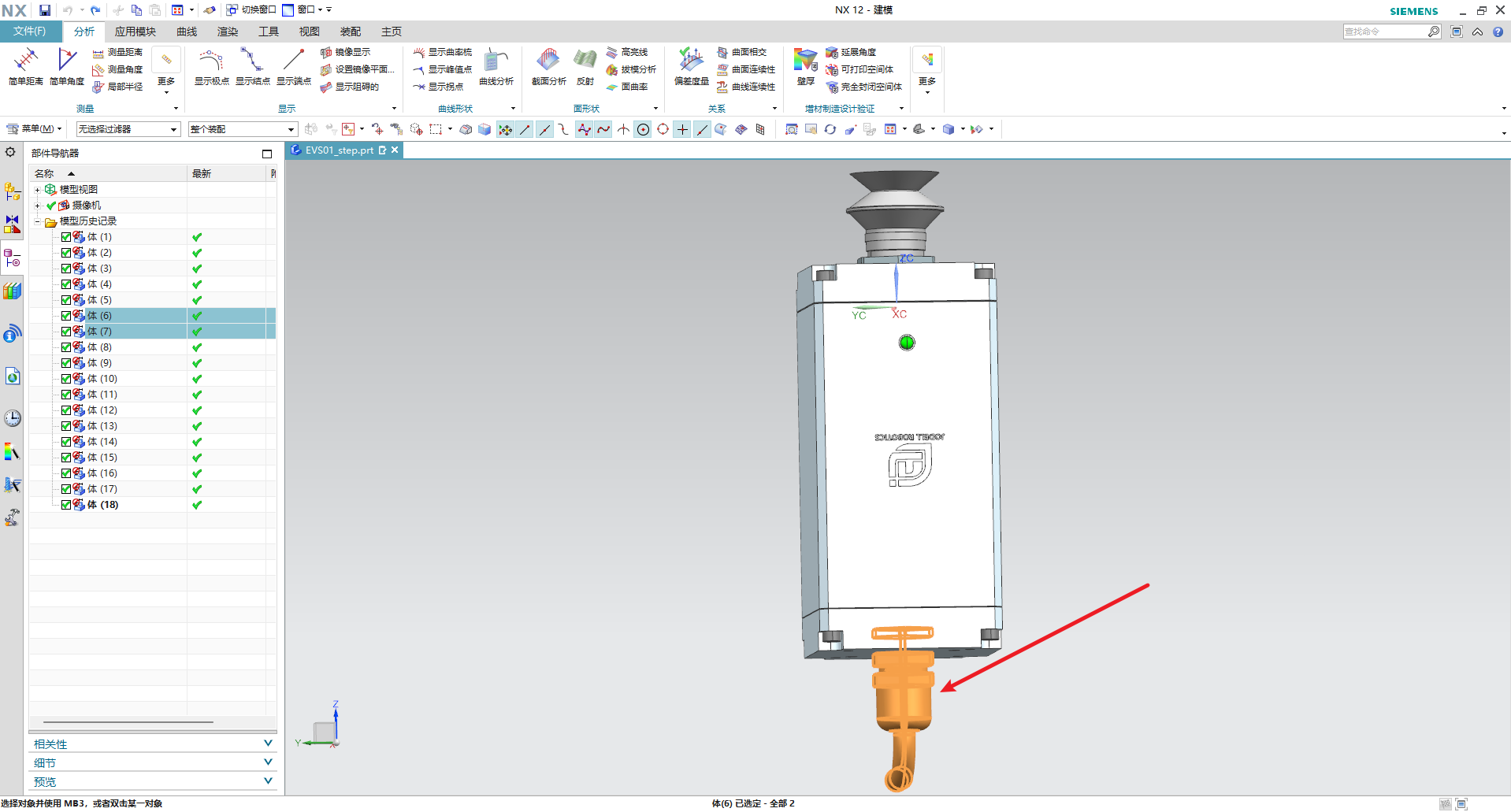
使用鼠标左键双击坐标轴,将工具的基坐标系调整到机器人法兰盘 TCP(工具中心点)所在的工具原点上,并调整坐标系的坐标轴朝向,以确保视图中的坐标系与实际的基坐标系相符。
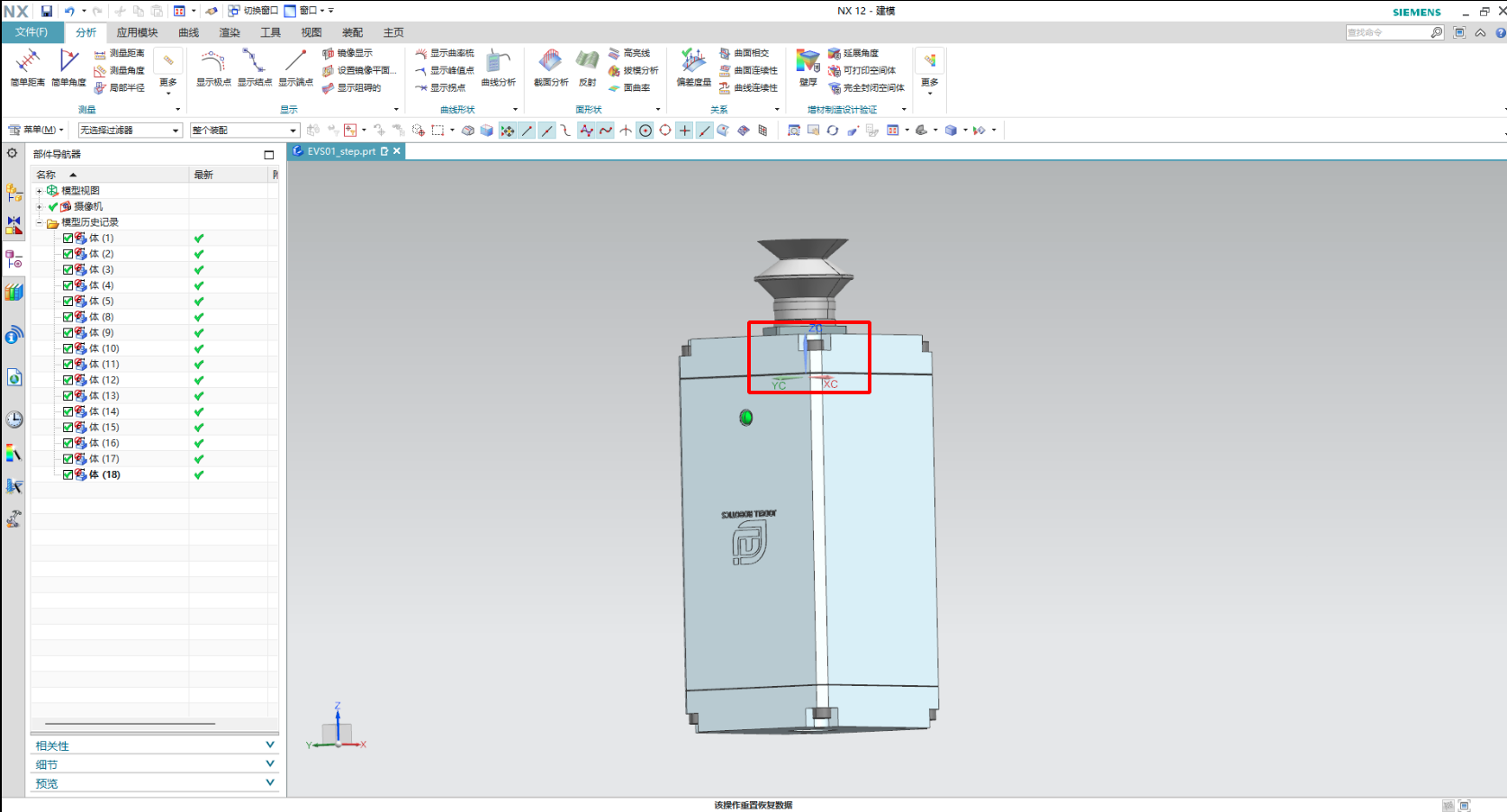
调整好坐标系后,鼠标右键点击视图窗口,然后鼠标点击
确定锁定坐标轴,如下图所示。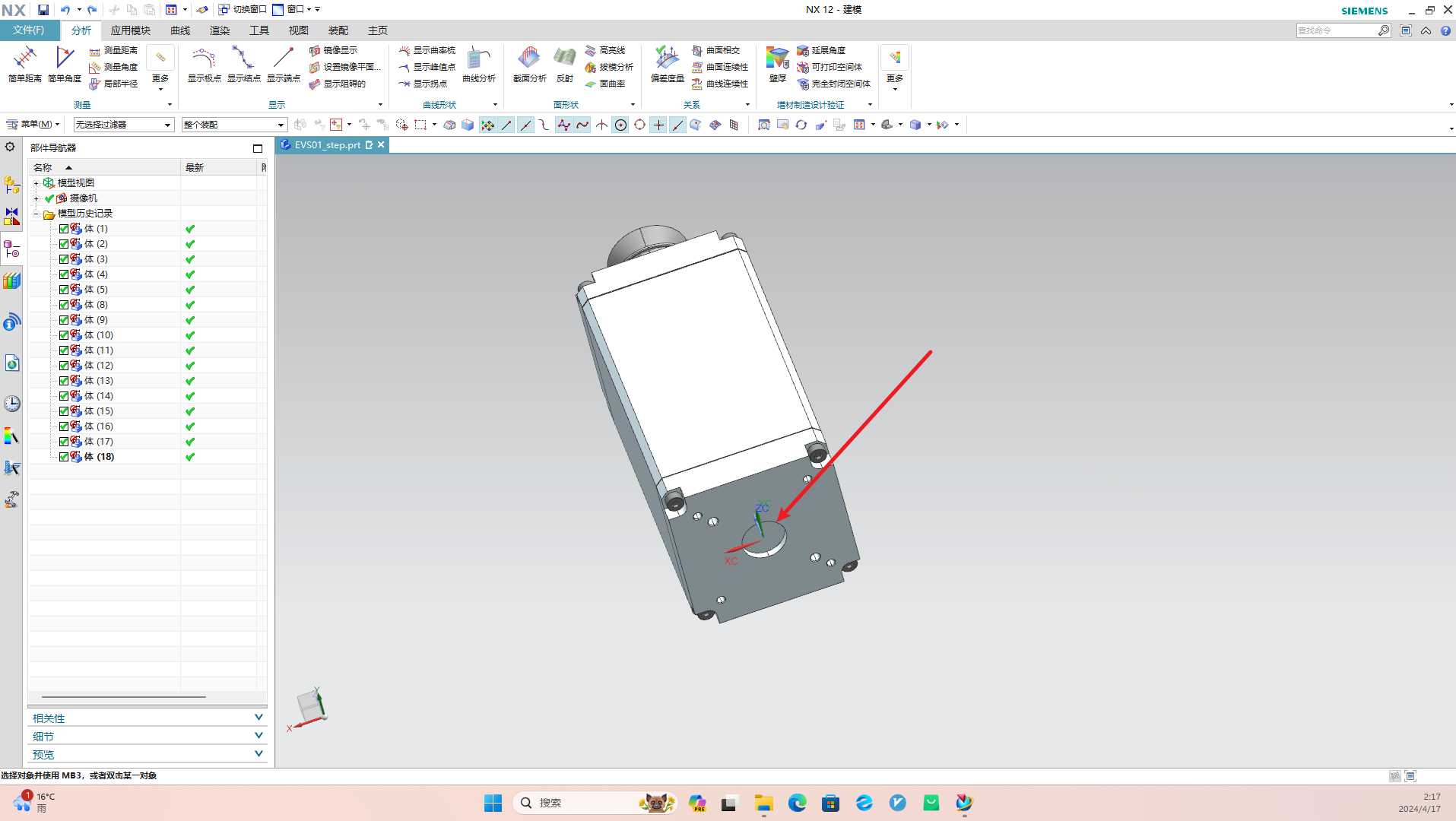
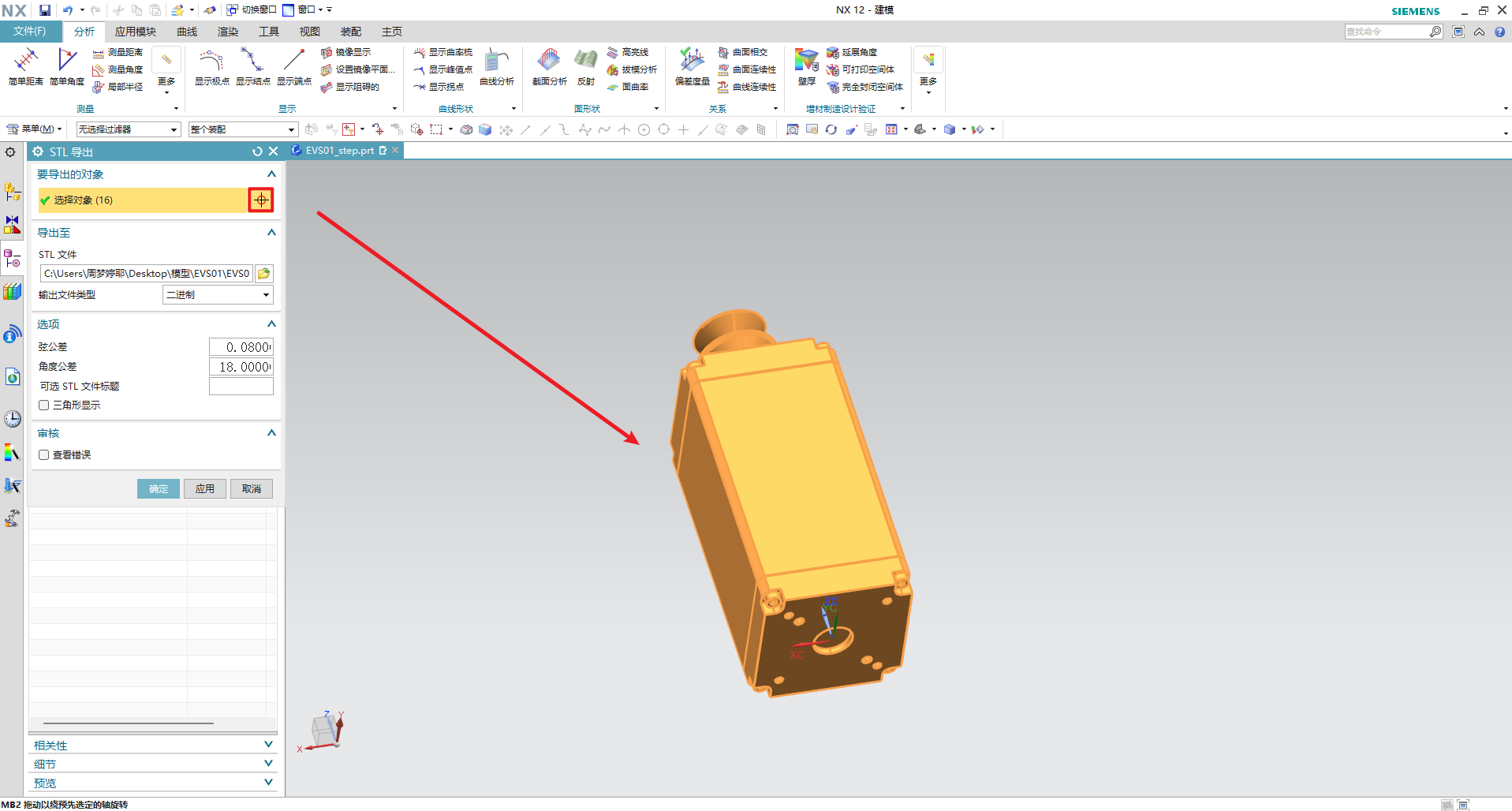
导出工具模型:点击菜单栏
文件→导出,选择STL格式。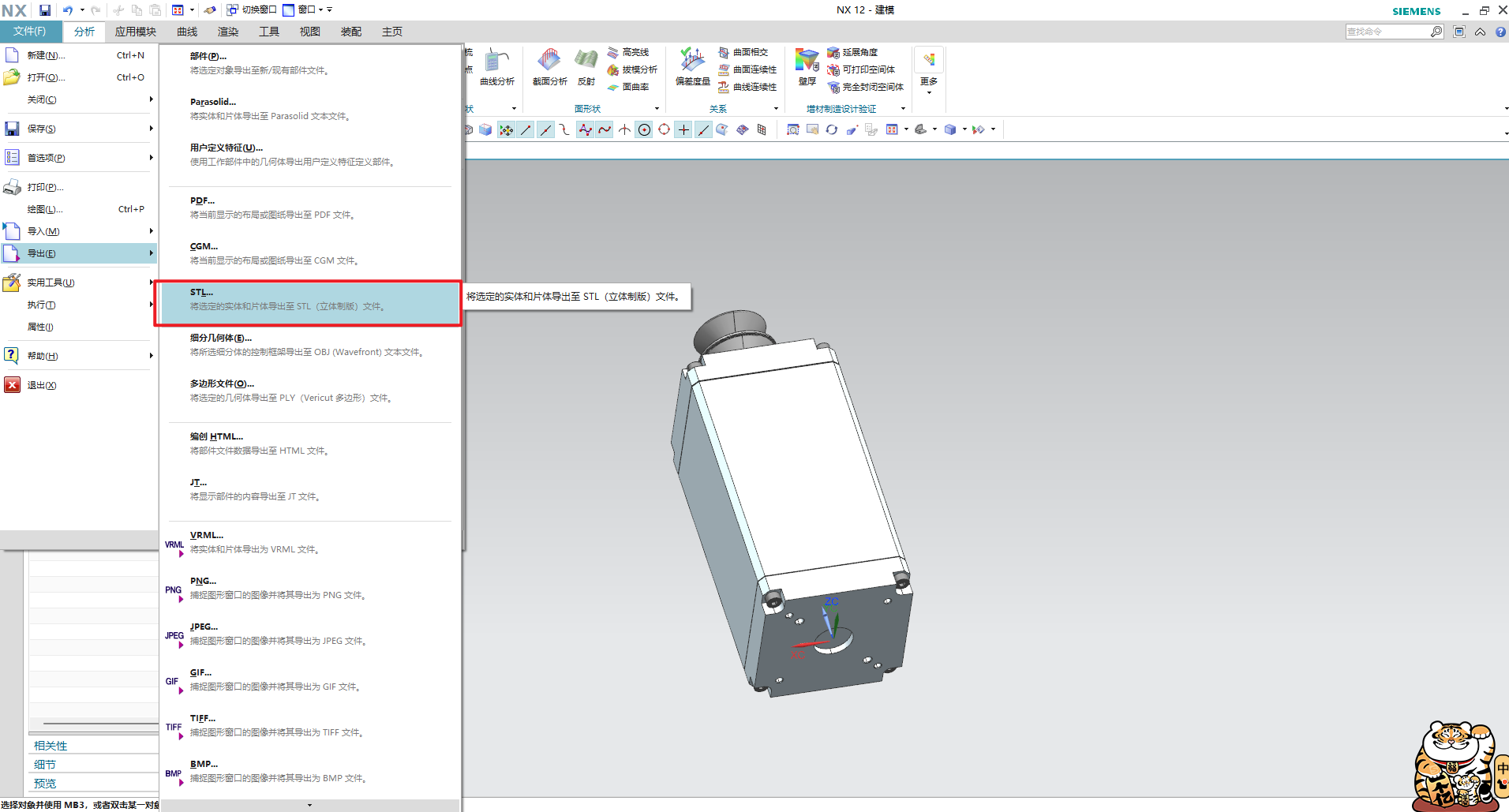
在 STL 导出窗口中,点击
导出至下面的目录选择按钮,选择要导出的目录并填写文件名。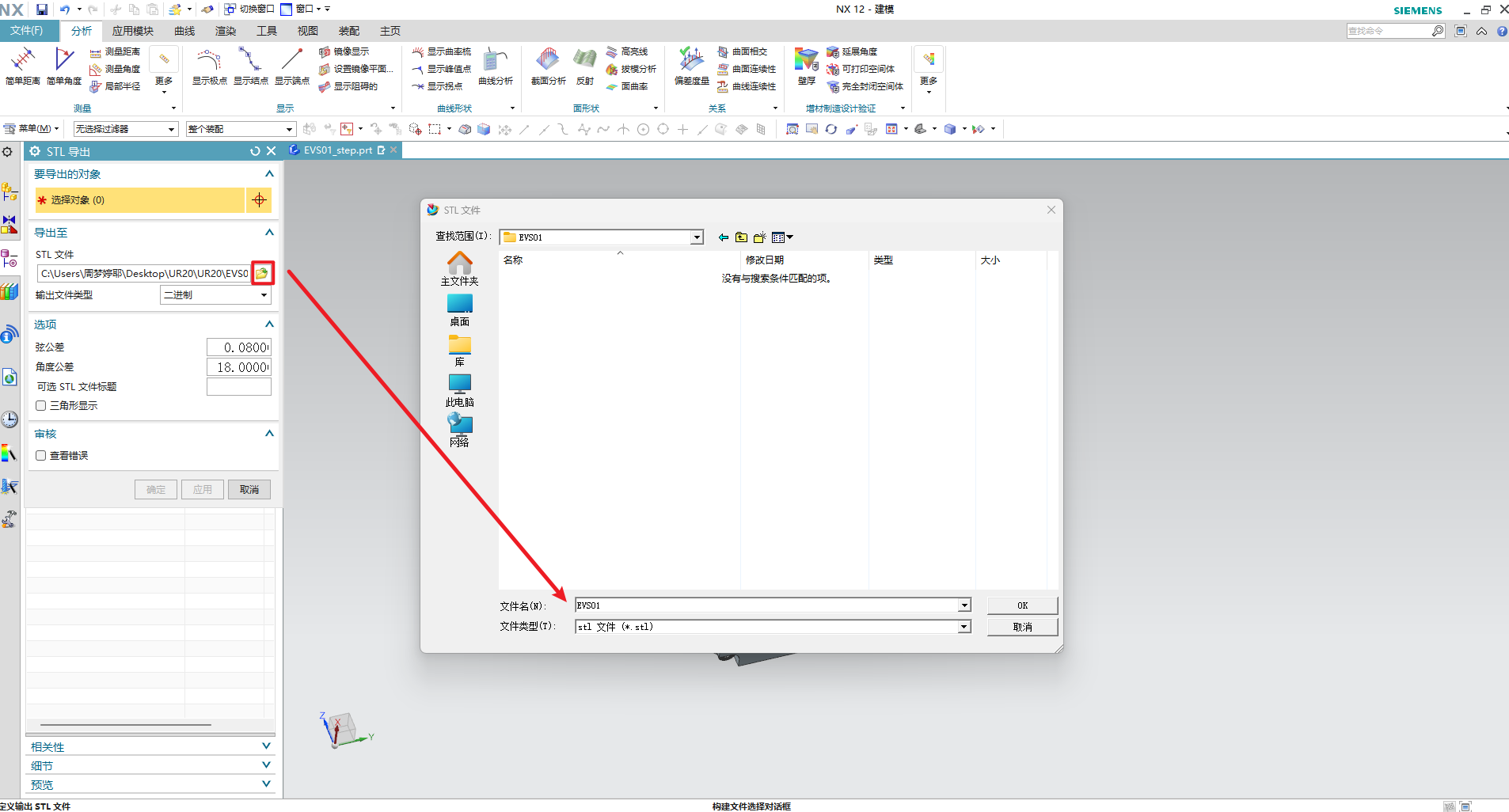
在 3D 视图中选择要导出的工具模型。
点击导出窗口的
确定按钮,导出模型。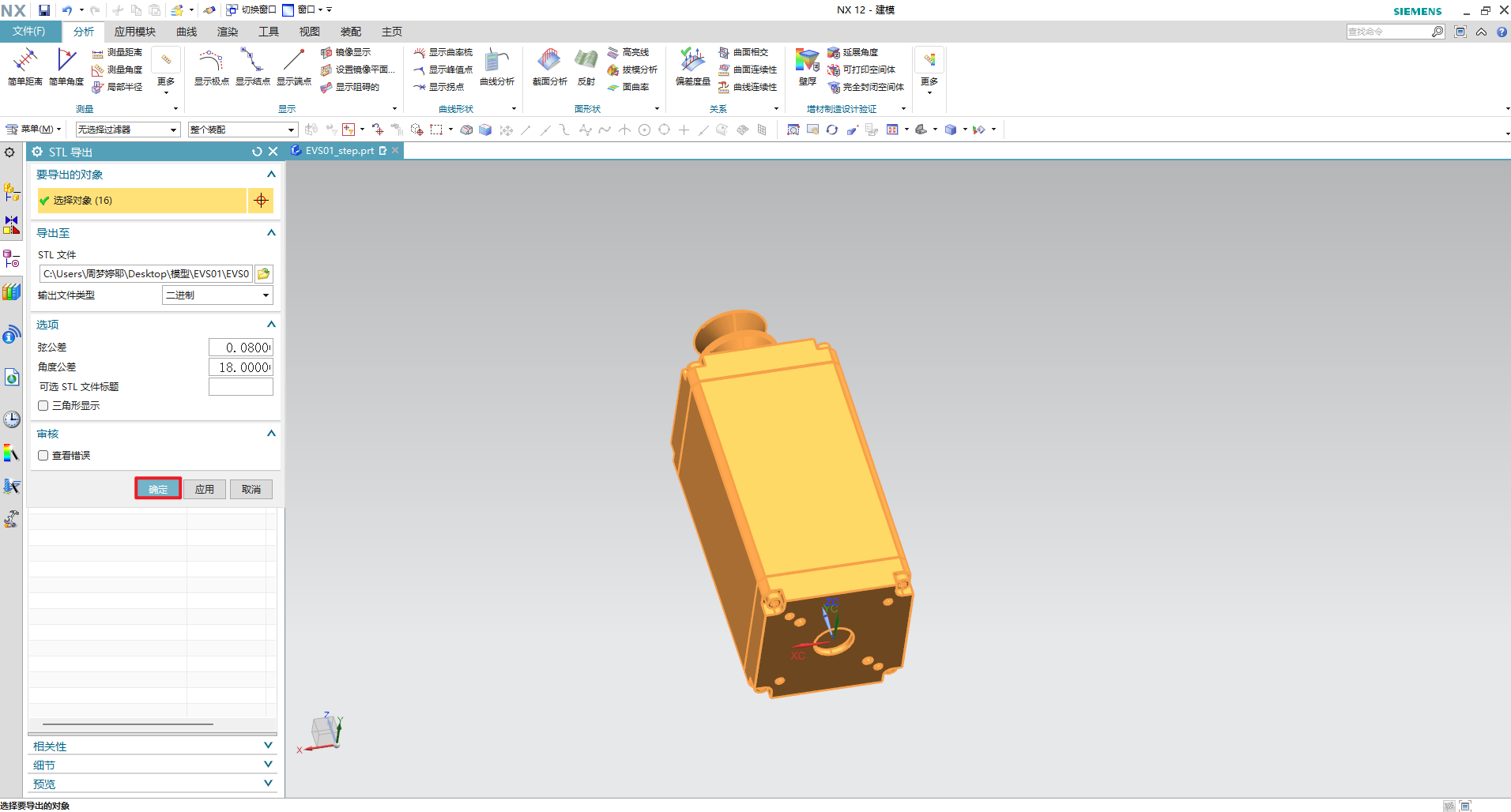
二. 调整关节尺寸和文件格式
打开 Blender 软件,点击
文件(File)→导入(Import)→Stl。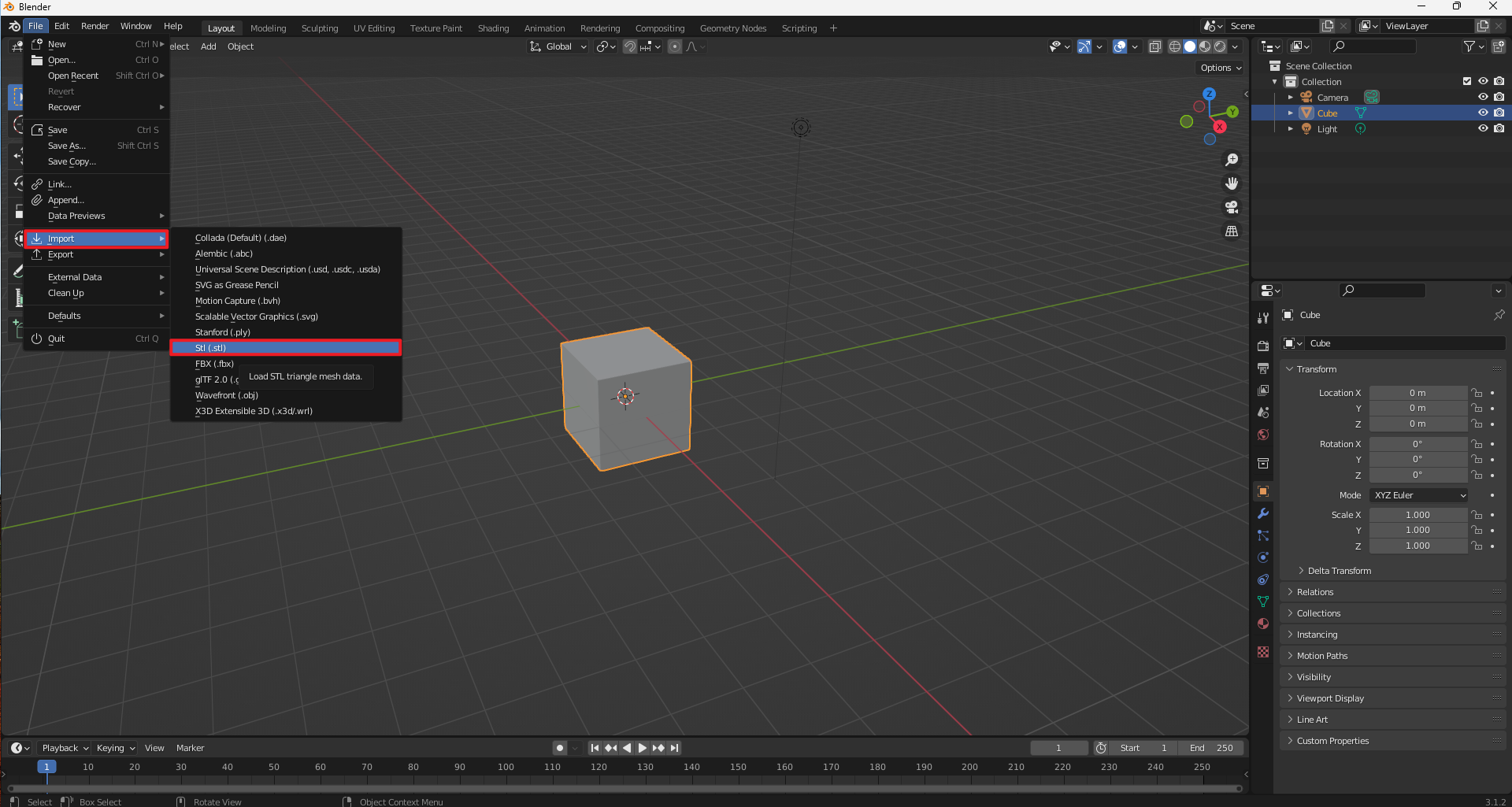
打开关节目录,选中工具模型,缩放参数改为
0.001,前进改为-Z 向前(-ZForward),向上改为Y 向上(Y UP)。修改完成后点击导入 STL(Import STL),如下图所示: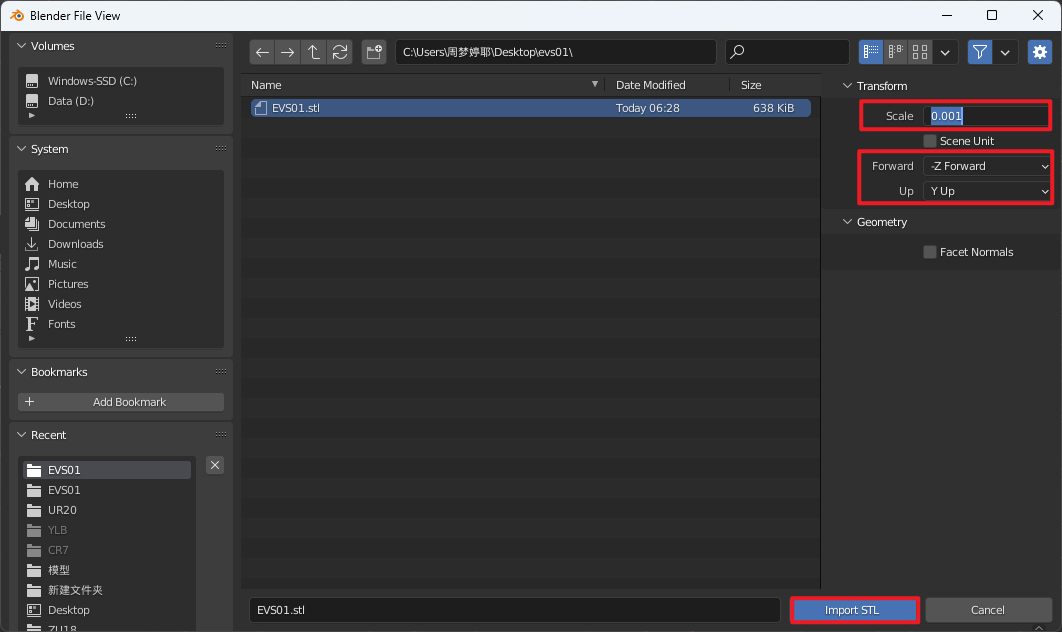
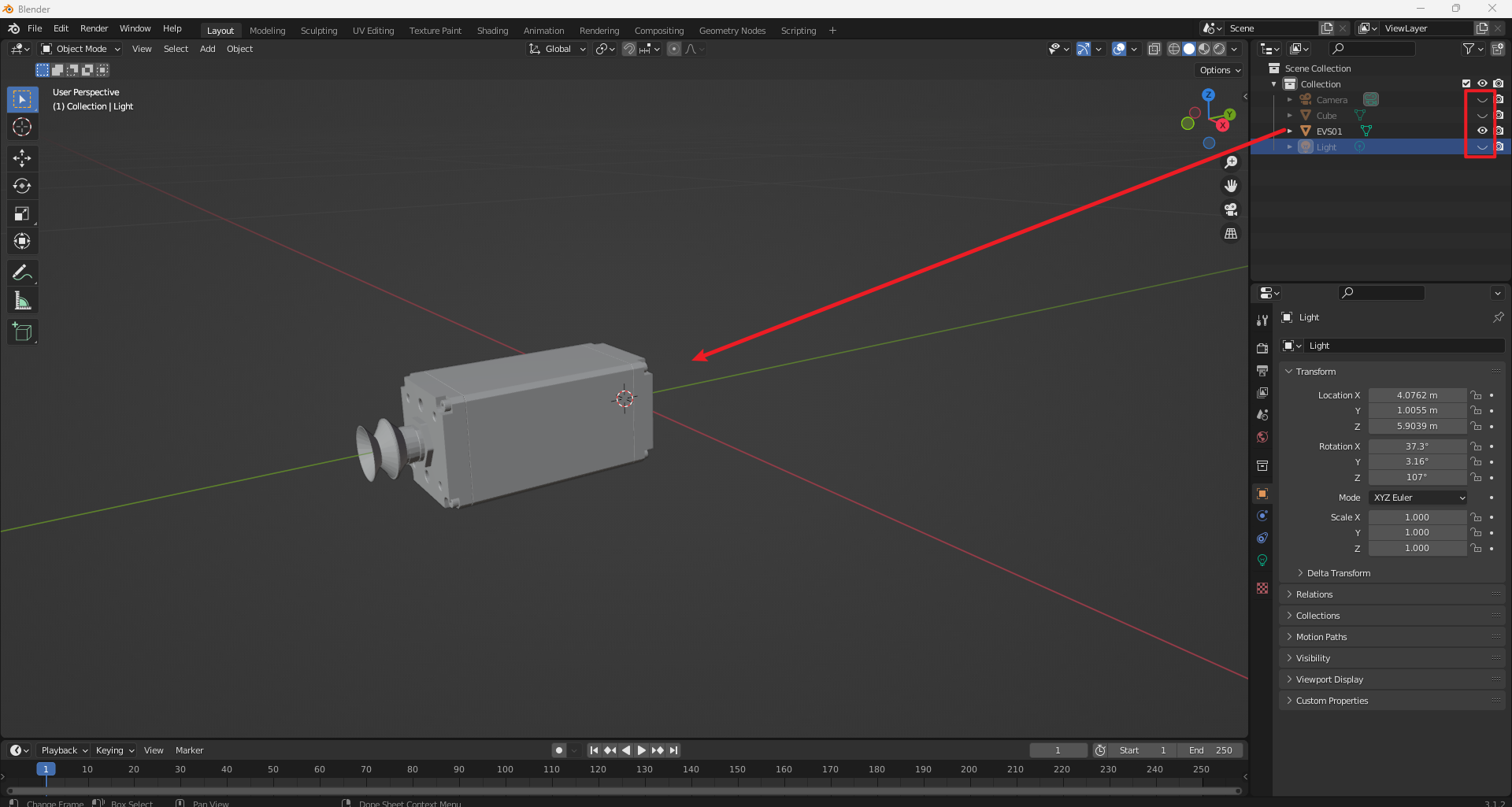
在导入工具模型后,点击眼睛图标关闭其他模型,只显示工具在视图中,效果如下图所示:
导出关节:点击
文件(File)→导出(Export)→Wavefront(.obj)。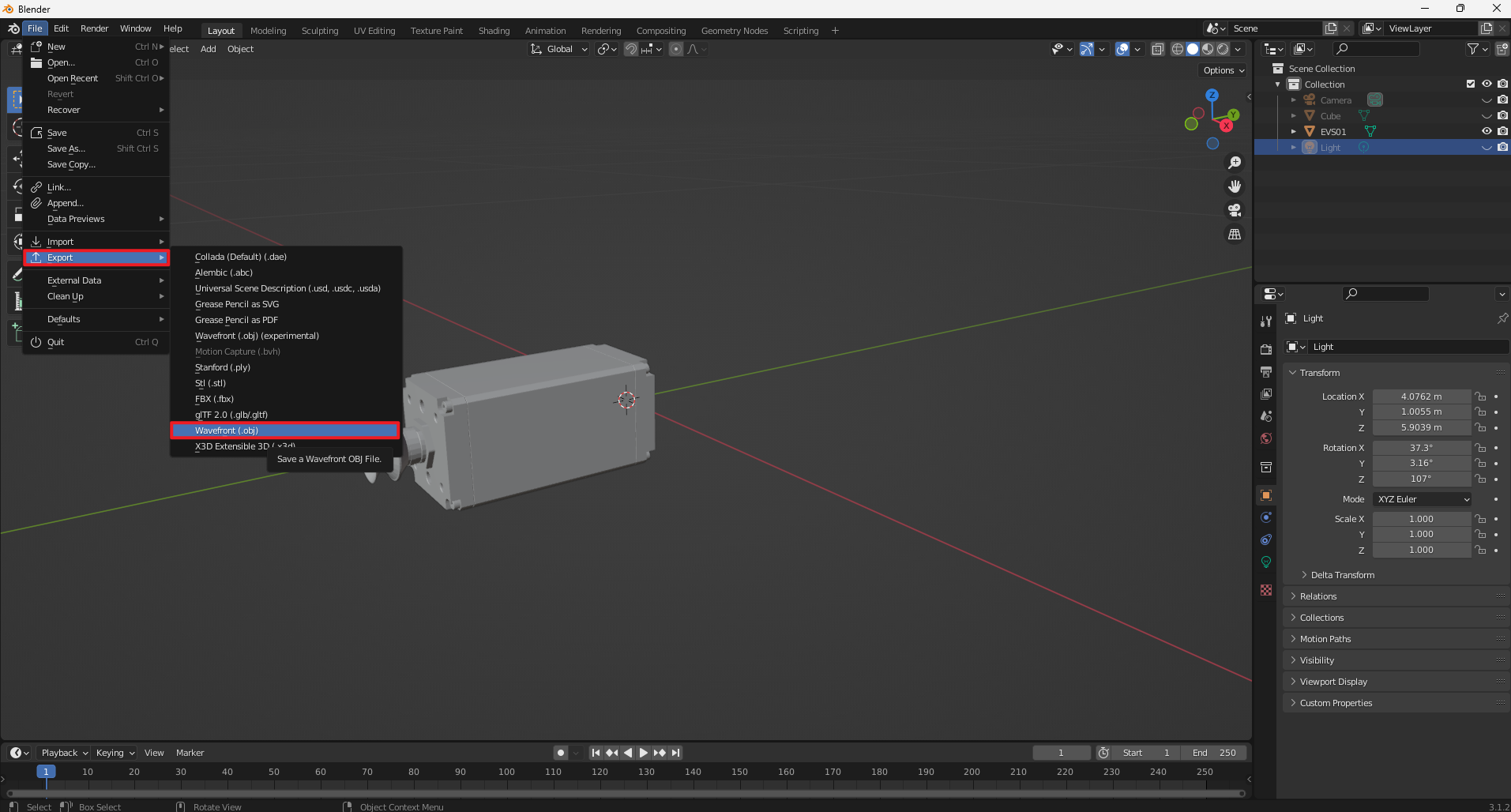
选择保存路径,输入保存的文件名,窗口右侧选中模型,选中文件视图窗口中
仅导出选中的物体(Selection Only),点击导出 OBJ (Export OBJ)。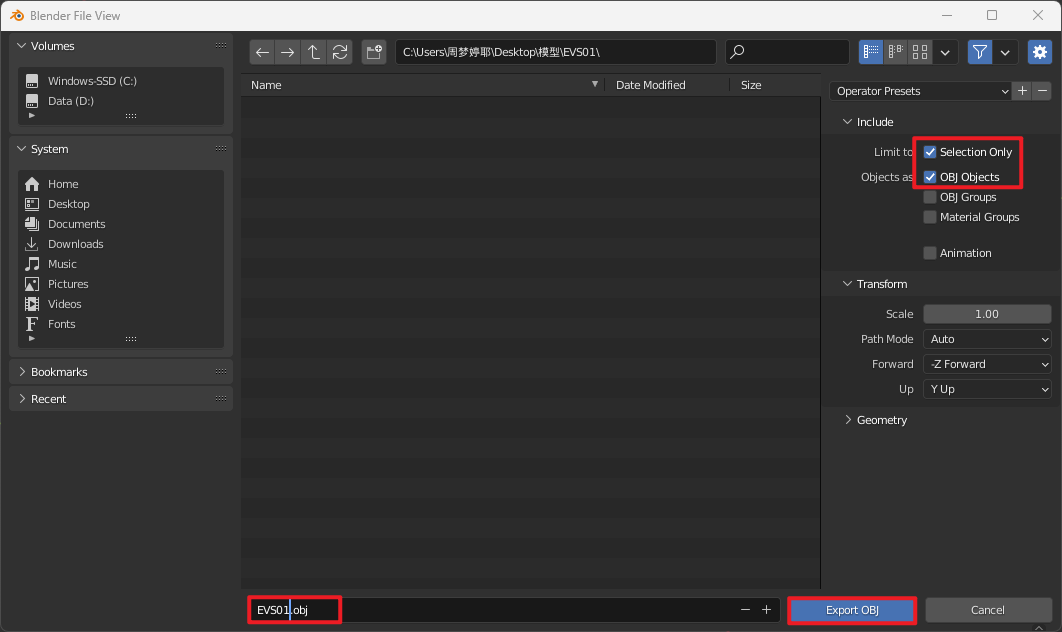
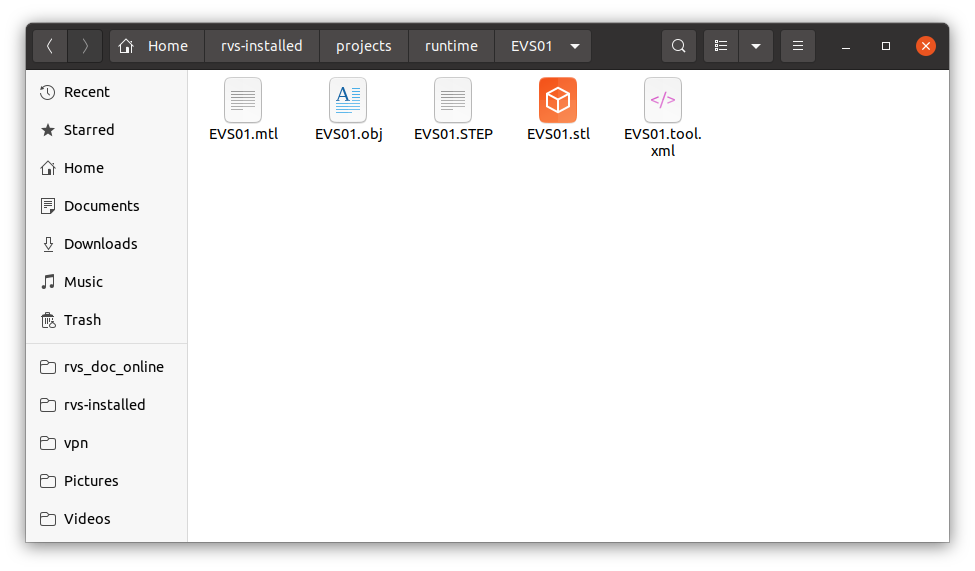
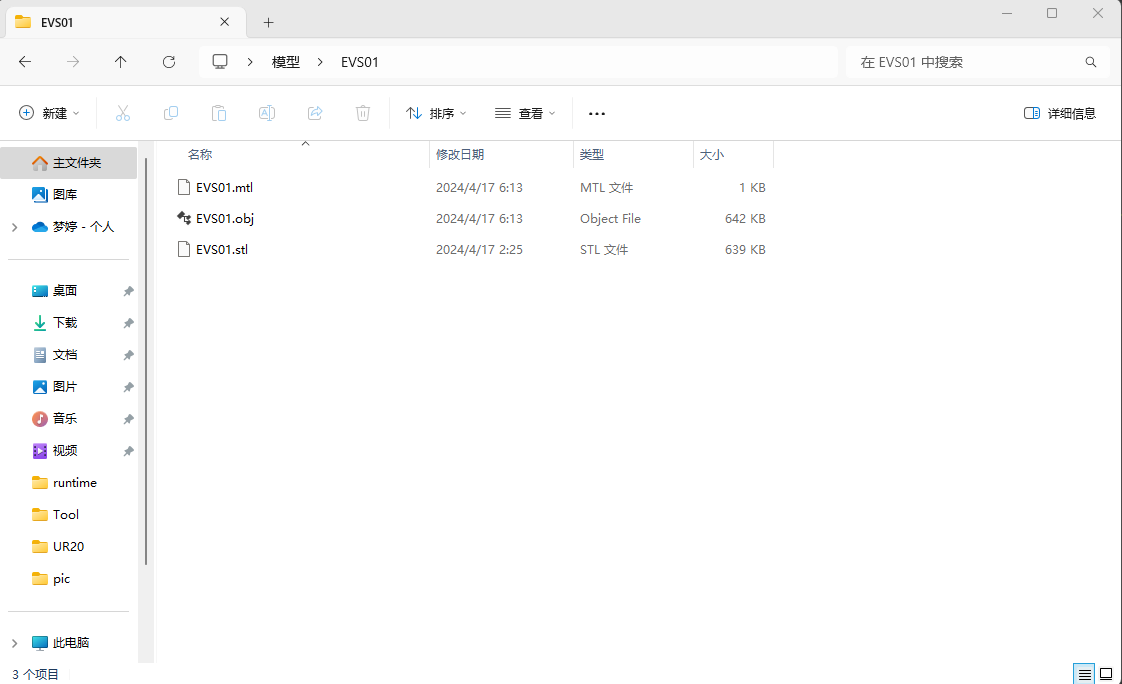
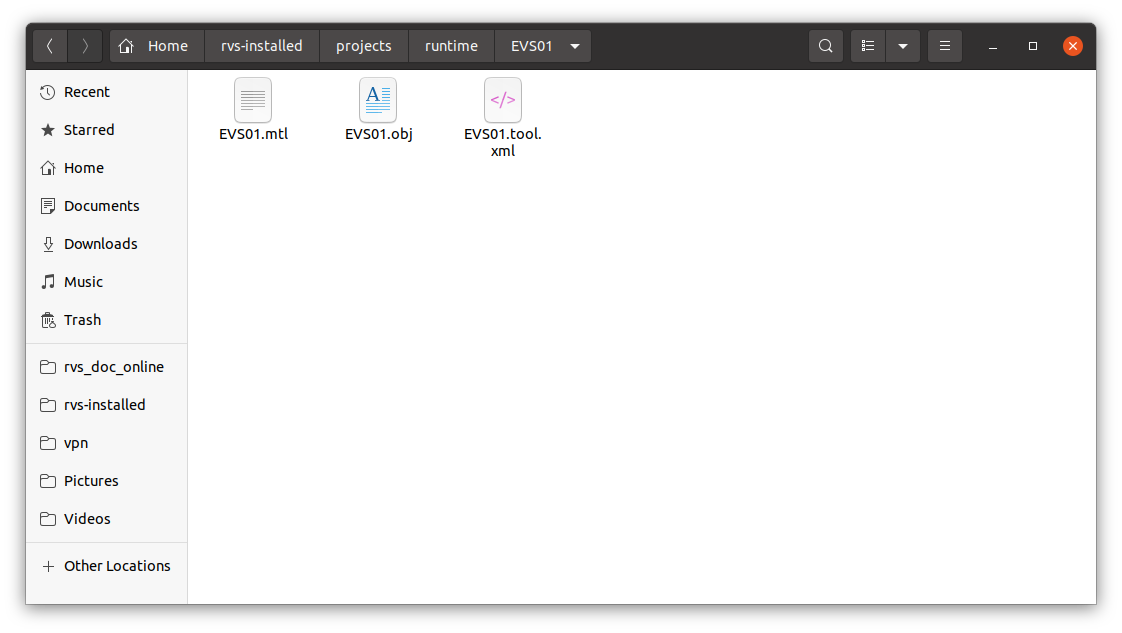
导出后的文件夹应包含两个文件:一个是以 .obj 扩展名结尾的模型文件,另一个是以 .mtl 扩展名结尾的材质文件。文件夹的显示应该如下所示:
生成工具模型
将 obj 和 mtl 文件拷贝到当前 runtime 目录下的 “EVS01”(自行创建) 目录中。同时,将 tool.xml 文件也拷贝至该目录,并将其重命名为与工具同名。这样,目录结构应该如下所示:
使用编辑器打开
EVS01.tool.xml。修改工具模型名称、OBJ 文件、工具末端坐标等参数。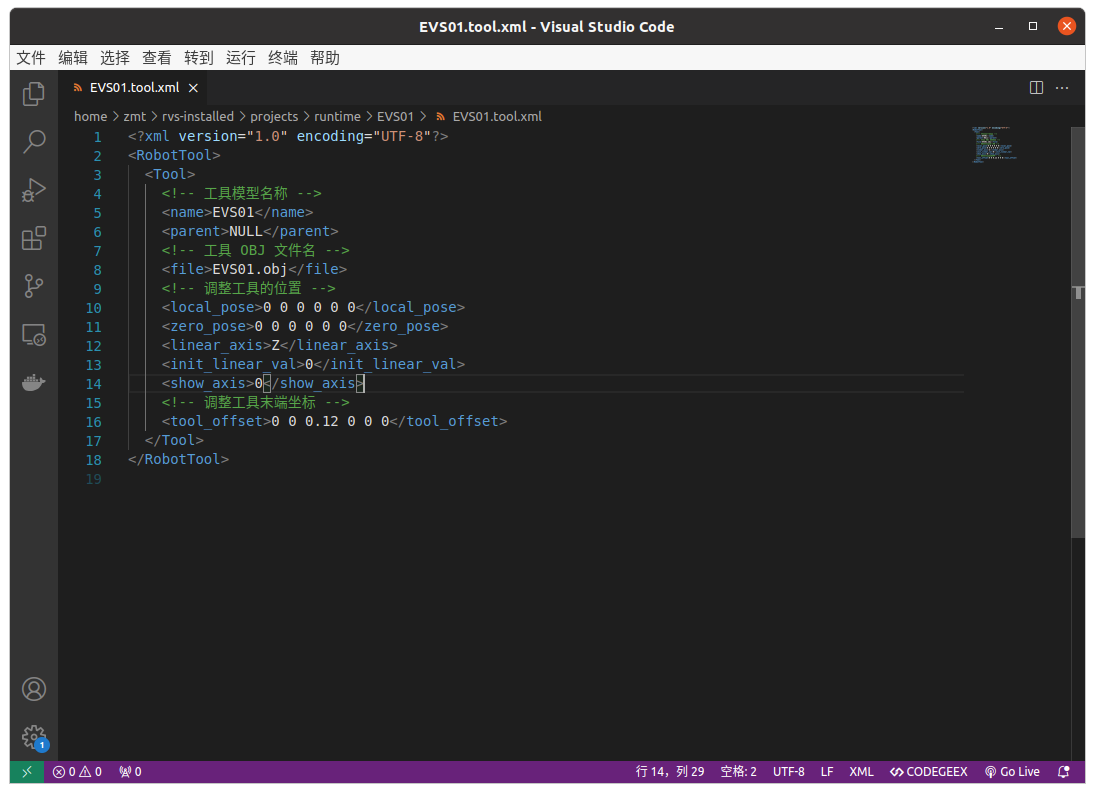
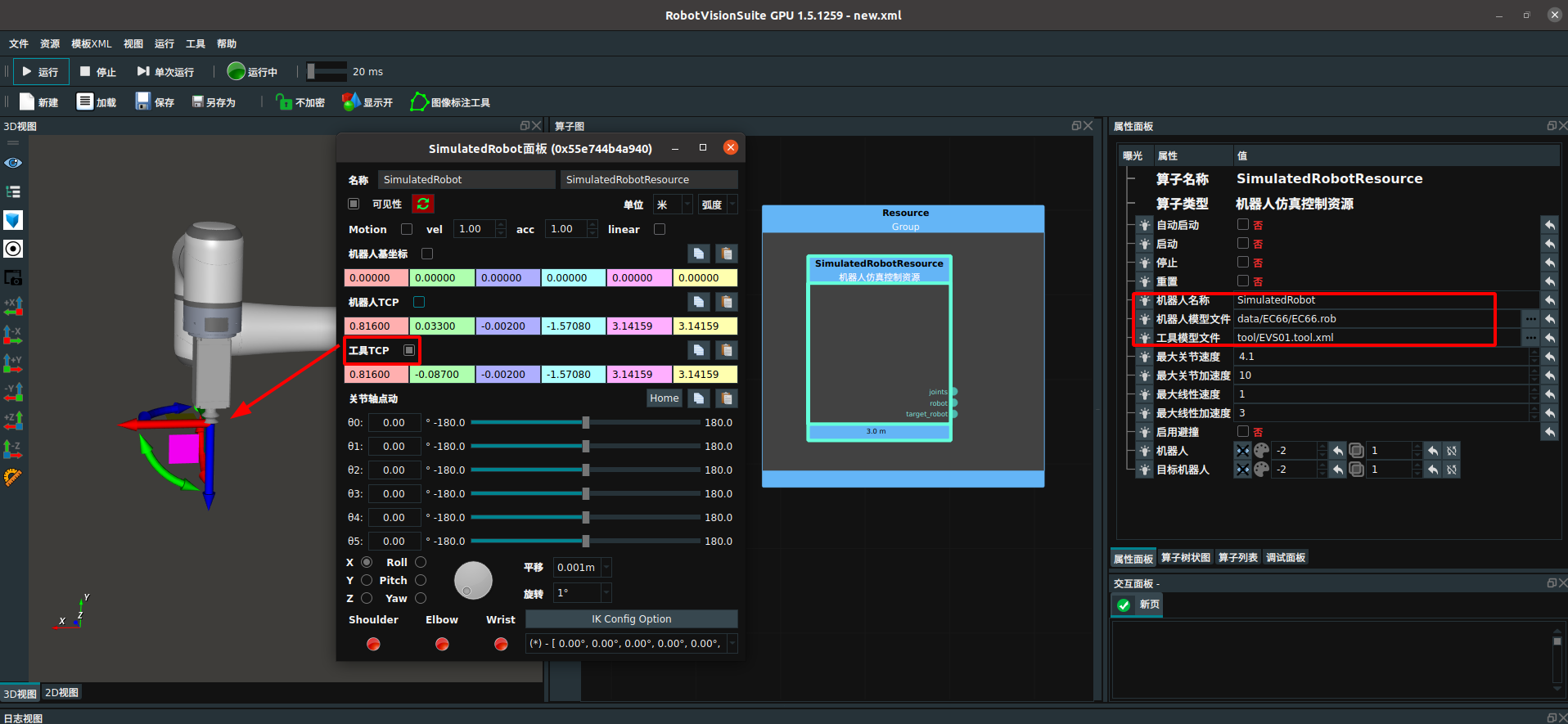
打开 RVS,添加
机器人仿真控制资源算子,输入机器人模型文件、工具模型文件。查看工具是否以机器人法兰盘 TCP 为基坐标系,双击机器人模型打开机器人面板,打开工具 TCP,检查工具末端坐标。如果不符合要求,重新调整 tool.xml 中的参数。如果符合要求,工具模型制作完成。