ScaleJoint 关节值比例转换
ScaleJointNode 算子用于转换机器人关节值的角度和弧度单位。
| 转换类型 | 功能 |
|---|---|
| rad2deg | 从弧度转换到角度。 |
| deg2rad | 从角度转换到弧度。 |
rad2deg
将 ScaleJoint 算子的 转换类型 属性选择 rad2deg ,将机器人关节值从弧度转换到角度。
数据信号输入输出
输入:
joint:数据类型:JointArray
输入内容:转换前的机器人关节值
joint_list:数据类型:JointArrayList
输入内容:转换前的机器人关节值列表
输出:
joint:数据类型:JointArray
输出内容:转换后的机器人关节值
joint_list:数据类型:JointArrayList
输出内容:转换后的机器人关节值列表
功能演示
使用 ScaleJoint 算子中 rad2deg ,对机器人 joint 从弧度到角度进行转换。
步骤1:算子准备
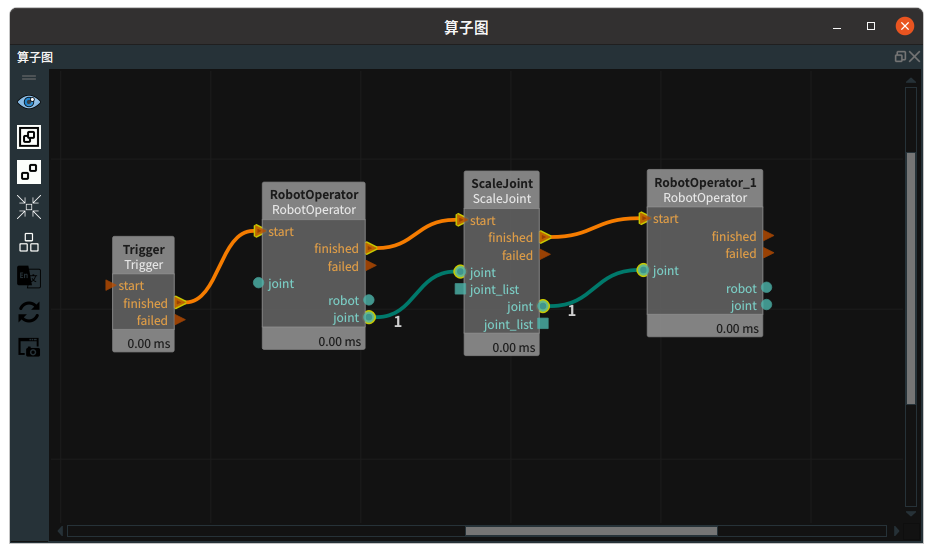
添加 Trigger 、RobotOperater(2 个) 、ScaleJoint 算子至算子图。
步骤2:设置算子参数
设置 RobotOperater 算子参数:
类型 → EmitJoint
关节 → 0 0 1.5708 0 1.5708 0
设置 ScaleJoint 算子参数:转换类型 → rad2deg
设置 RobotOperater_1 算子参数:类型 → EmitJoint
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,RobotOperater_1 算子的属性面板,弧度值已经转换成角度。

deg2rad
将 ScaleJoint 算子的 转换类型 属性选择 deg2rad ,从角度转换到弧度。
数据信号输入输出
输入:
joint:数据类型:JointArray
输入内容:转换前的机器人关节值
joint_list:数据类型:JointArrayList
输入内容:转换前的机器人关节值列表
输出:
joint:数据类型:JointArray
输出内容:转换后的机器人关节值
joint_list:数据类型:JointArrayList
输出内容:转换后的机器人关节值列表
功能演示
本节将使用 ScaleJoint 算子中 deg2rad ,将机器人 joint 从角度到弧度进行转换。这与 ScaleJoint 算子中 rad2deg 属性的从弧度转换到角度的方法相同,请参照该章节的功能演示。