RVS 开机自启
Windows 开机自启
支持 win10/win11系统下面的 RVS 开机自启,并能一直监视程序是否退出,如果程序退出,会再次自动启动软件。
至下载链接中下载自启动脚本。下载后解压缩文件夹内容如下:
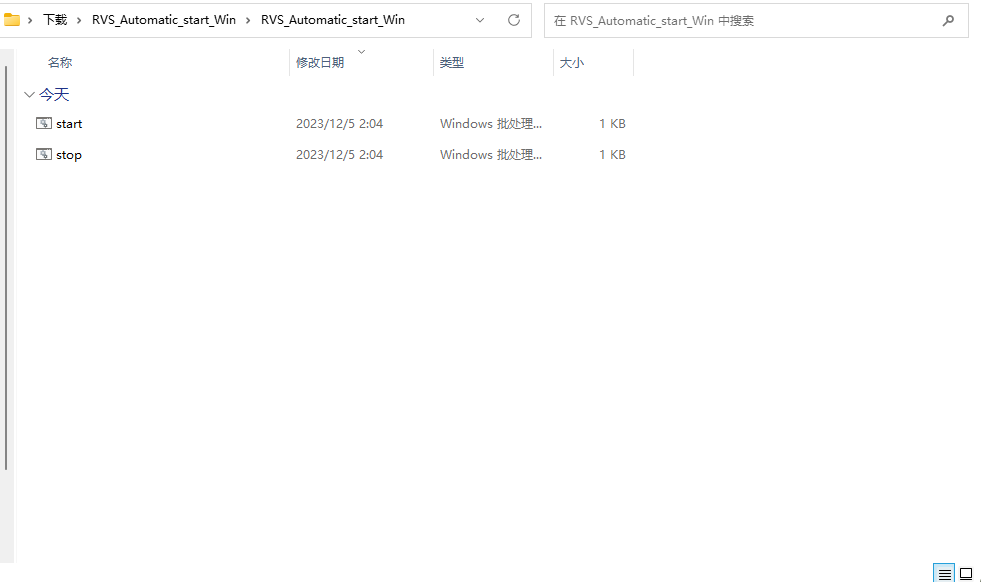
start.bat:启动 RVS 开机自启脚本。stop.bat:停止 RVS 开机自启脚本。
操作步骤:
打开 start.bat 脚本文件。
@echo off :Excute cd D:/RobotVisionSuite/runtime/ start ../RobotVisionSuite.exe -l unstacking.xml -r :Protect ping 127.0.0.1 -n 10 for /f "delims= " %%i in ('tasklist^|find /i "RobotVisionSuite.exe"') do ( if /i "%%i"=="RobotVisionSuite.exe" goto Protect) goto Excute
此处为 RVS 安装路径,按照实际安装路径进行修改。
cd D:/RobotVisionSuite/runtime/若路径中包含空格,需要使用双引号将目录路径括起来,如:
cd "D:/Program Files(x86)/RobotVisionSuite/runtime/"
此处为运行 RobotVisionSuite.exe,并打开 runtime 目录下指定的工程文件。
start ../RobotVisionSuite.exe -l unstacking.xml -r
此处为运行 RobotVisionSuite.exe,并打开 runtime 目录下指定的工程文件。
start ../RobotVisionSuite.exe -l unstacking.xml -r
将
start.bat脚本文件放到 RobotVisionSuite.exe 程序的同级运行目录下,并右键创建生成快捷方式文件start.bat - 快捷方式。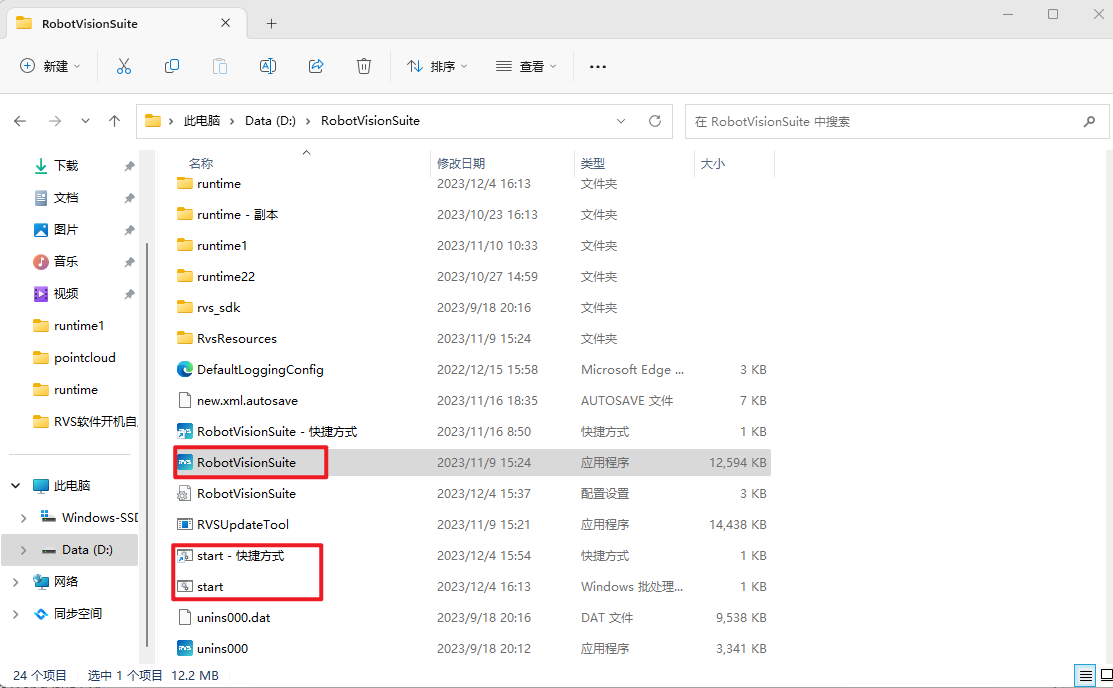
将
start.bat - 快捷方式文件放到 windows 的启动目录下。win+R 快捷键进入
运行,输入 shell:startup 后确定,进入 windows 启动目录。
将
start.bat - 快捷方式文件放到启动目录。
重启电脑,观察 RobotVisionSuite.exe 是否开机成功自启动,可手动退出程序 RVS 界面,测试程序是否会重新自启动。
双击
stop.bat脚本便可停止软件启动。
Ubuntu 开机自启
开机自启 RVS
搜索【启动应用程序/Startup Application】并打开 “启动应用程序(Startup Applications Preferences)”。

在 【Startup Applications Preferences】 窗口中点击
Add按钮,弹出 【Add Startup Program】添加新的启动项。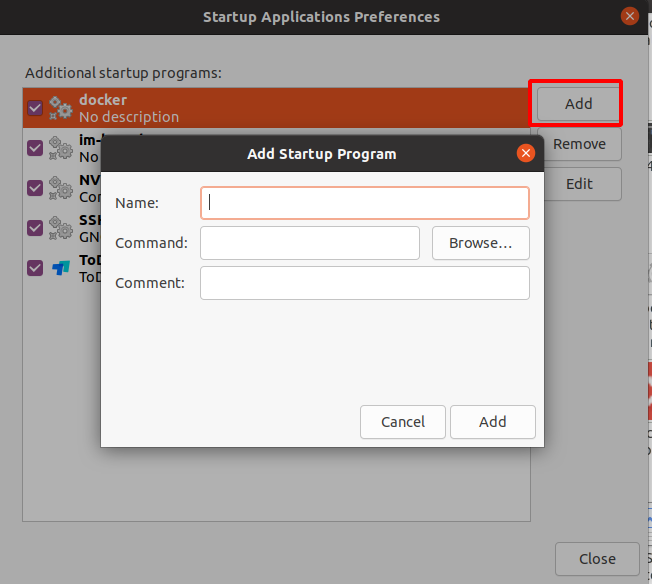
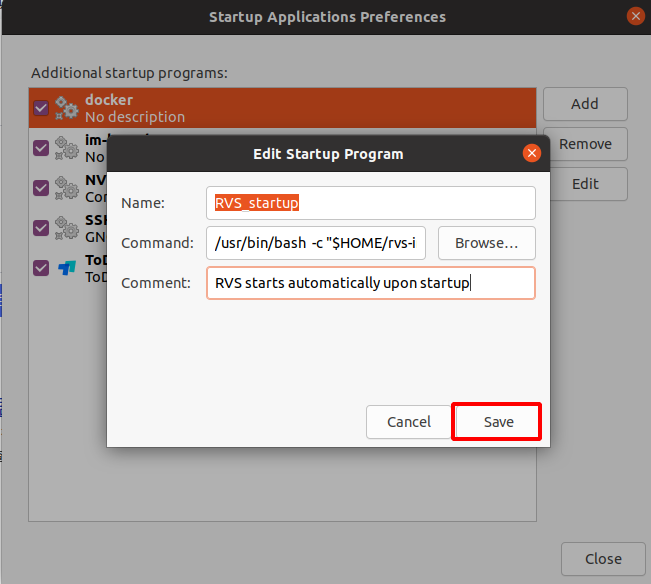
编辑启动项内容:
在
Name字段中输入启动项的名称,例如 “RVS_startup”。在
Command字段中输入启动命令。/usr/bin/bash -c "$HOME/rvs-installed/script/rvs_start.sh"
在
Comment字段中输入描述(可选)。点击
保存(Save)保存启动项。
启动项已添加并启用,请确保左侧的复选框已勾选。点击
关闭(close)。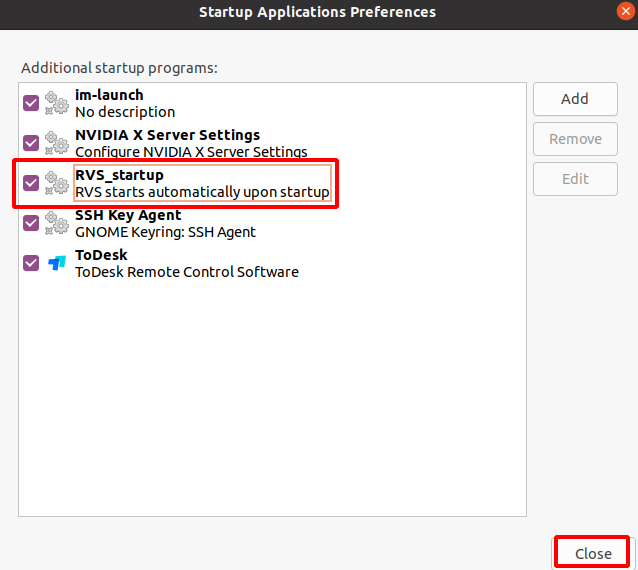
5.至此,RVS 开机自启功能已成功设置完成。重启电脑,观察 RobotVisionSuite.exe 是否开机成功自启动。
开机自启 XML
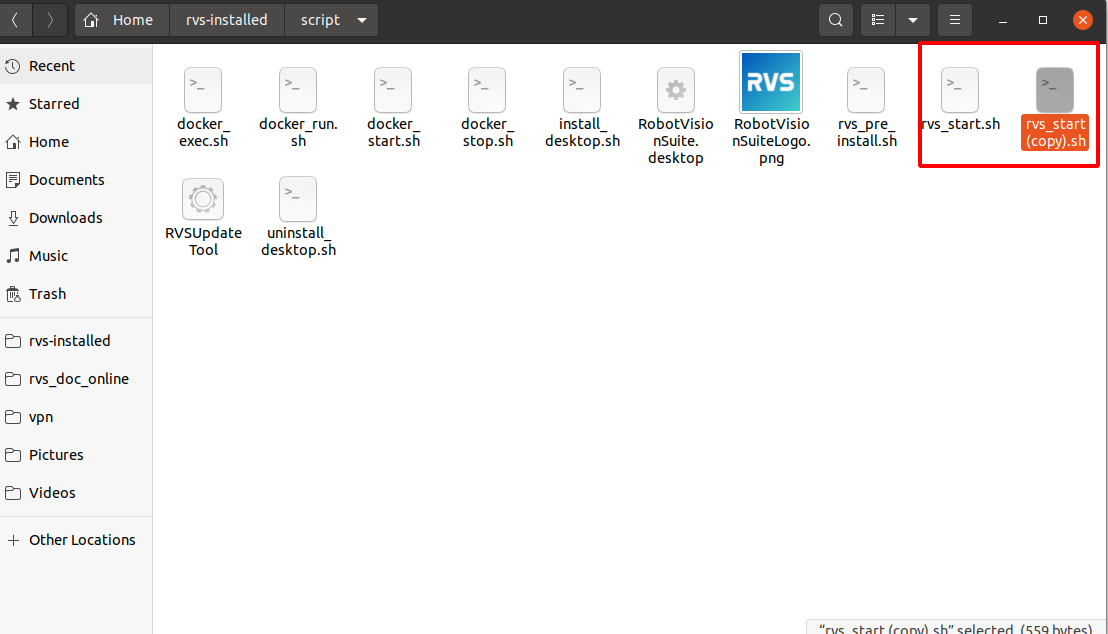
复制 rvs_start.sh 脚本,修改脚本名称,如 rvs_xml_start.sh。
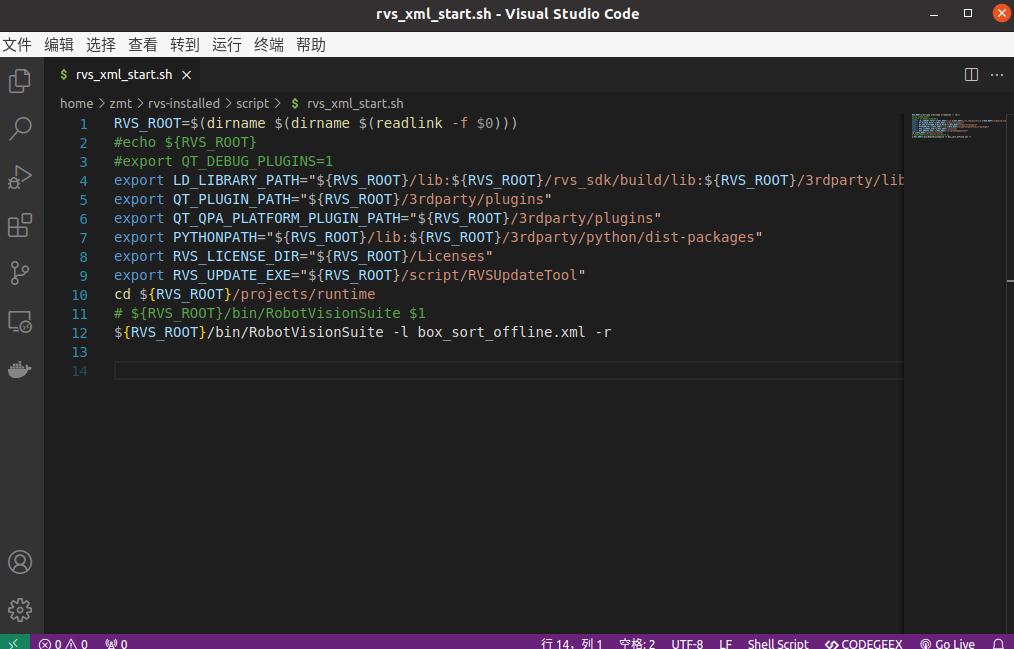
打开复制的脚本 rvs_boot.sh。
此处为运行 RobotVisionSuite.exe。
${RVS_ROOT}/bin/RobotVisionSuite $1
此处为运行 RobotVisionSuite.exe,并打开 runtime 目录下指定的工程文件。
-r指的是打开 XML 文件后让 RobotVisionSuite 自动处于 Running 运行状态。${RVS_ROOT}/bin/RobotVisionSuite -l box_sort_offline.xml -r
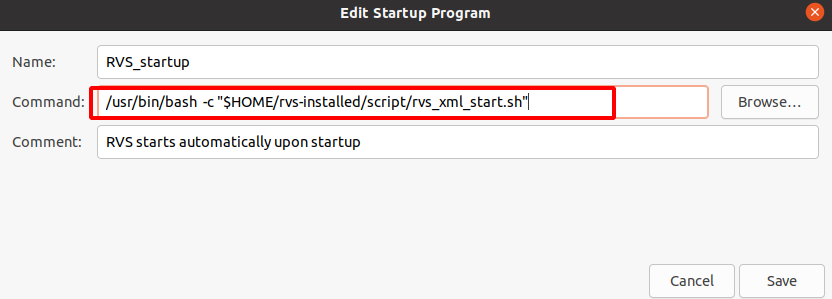
重复 开机自启RVS 章节操作,需要修改的是:
在
Command字段中输入启动命令时,脚本名称需要修改为 rvs_xml_start.sh。/usr/bin/bash -c "$HOME/rvs-installed/script/rvs_xml_start.sh"
开机自启 docker+RVS
将下述文本拷贝到空白的脚本文件中,修改名称为:rvs_docker_start.sh
#!/bin/bash /usr/bin/docker rm rvs-installed /bin/bash -c "$HOME/rvs-installed/script/docker_run.sh" #/usr/bin/docker restart rvs-installed xhost +local:docker > /dev/null nvidia-docker exec -w /rvs/projects/runtime -it rvs-installed /bin/bash -c "export LD_LIBRARY_PATH=/usr/local/Qt-5.15.2/lib/:/rvs/lib/:/rvs/build/lib/:/rvs/rvs_sdk/build/lib:/usr/local/lib:/usr/local/pylon5/lib64/:/usr/local/nvidia/lib:/usr/local/nvidia/lib64;export RVS_LICENSE_DIR=/rvs/Licenses;/rvs/bin/RobotVisionSuite -l new.xml -r" xhost -local:docker > /dev/null
nvidia-docker exec后面的-w 路径参数指定了进入 Docker 容器后立即切换到的工作目录(work-dir)。需要注意的是,这里的路径是指容器内部的路径,而不是宿主机的路径。-it rvs-installed /bin/bash是指进入名称为rvs-installed的 Docker 容器内部,并执行/bin/bash命令。其中,/bin/bash -c后面跟着的一长串命令是由该 Bash shell 执行的具体命令。export LD_LIBRARY_PATH=...用于更改动态库目录,最终以分号结尾。如果需要保留之前的LD_LIBRARY_PATH,需要在后面补充:$LD_LIBRARY_PATH。/rvs/build/bin/RobotVisionSuite -l new.xml -r对应的功能是打开我们的软件并执行对应的 XML 文件(请确保这个 XML 文件在上述-w命令设定的路径内)。最后附加的-r指的是打开 XML 文件后让 RobotVisionSuite 自动处于 Running 运行状态。/rvs/bin/是 RobotVisionSuite 程序的路径地址。
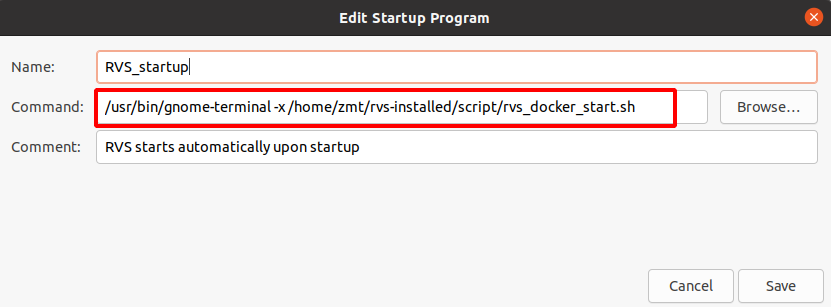
重复 开机自启RVS 章节操作,需要修改的是:
在
Command字段中输入启动命令:/usr/bin/gnome-terminal -- /home/username/rvs-installed/script/rvs_docker_start.sh
请将
username替换为你的实际用户名。