LoadCalibFile 加载标定文件
LoadCalibFile 算子用于从图漾相机的参数文件中读取相机内参、外参、畸变参数,并将结果显示在算子属性栏中。参数文件目前包含rgb镜头参数文件以及depth镜头参数文件两类。
以rgb镜头参数文件为例:
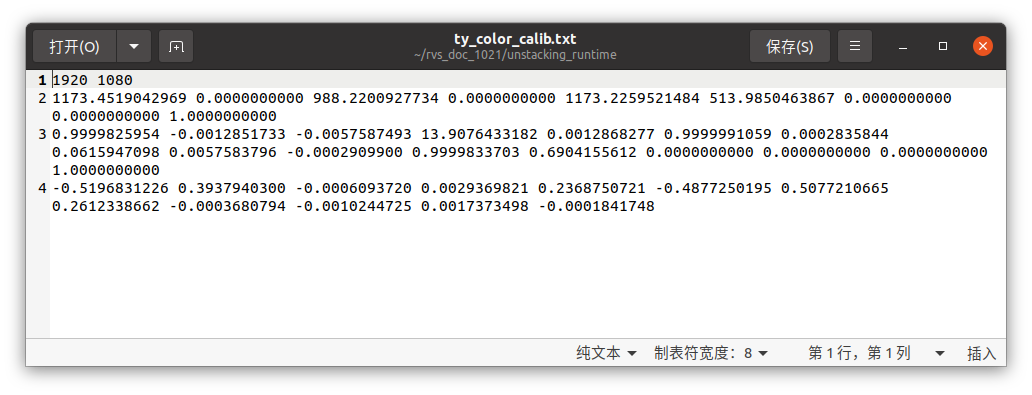
序号1:表示相机的RGB镜头在进行出厂标定时所采用的镜头分辨率。
序号2:表示相机RGB镜头的内参。总共9个数值,是一个按行排列的3 * 3矩阵。矩阵形式为[fx,0,cx,0,fy,cy,0,0,1],其中fx表示x轴方向的相机焦距(单位为像素),其中cx表示x轴方向的相机中心(单位为像素);fy、cy类似。
序号3:表示相机RGB镜头的外参,即RGB镜头到左IR镜头的空间坐标系转换矩阵。总共16个数值,是一个按行排列的4 * 4矩阵。左上角的3 * 3模块表示旋转,右上角的1 * 3表示平移。平移值的单位为毫米。
序号4:表示相机RGB镜头的畸变参数,总共12个数值。可以用来对原始的RGB图像进行畸变校正。
说明
关于depth_calib_file,其说明同上述说明保持一致。由于深度相机是虚拟相机,所以其畸变参数以及外参都是零矩阵。
算子参数
相机标定文件/calib_file:同输入端口的 calib_filename 作用一致。当输入端口 calib_filename 没有连接时,则必须给该 calib_filename 参数赋值。当输入端口calib_filename有连接时,则在执行算子后会自动将输入端口的数值覆盖该 calib_filename 参数的值。res_x/y:相机的 x 轴像素分辨率-相机的 y 轴像素分辨率。fx/fy/cx/cy:相机的 x 轴像素焦距-y轴像素焦距 -x 轴像素中心 -y 轴像素中心。相机外参坐标/extrinsic:外参,Pose 形式的转换矩阵。侧边按钮可以快捷复制、粘贴、重置操作。k1~s4:畸变参数。相机外参坐标/extrinsic_pose:设置 extrinsic_pose 在 3D 视图中的可视化属性。 打开extrinsic_pose 可视化。
打开extrinsic_pose 可视化。 关闭 extrinsic_pose 可视化。
关闭 extrinsic_pose 可视化。 设置 extrinsic_pose 的尺寸大小。取值范围:[0.001~10]。默认值:0.1。
设置 extrinsic_pose 的尺寸大小。取值范围:[0.001~10]。默认值:0.1。
数据信号输入输出
输入:
calib_filename:数据类型:String
输入内容:标定参数文件路径
输出:
extrinsic_pose:数据类型:Pose
输出内容:相机RGB镜头的外参转换矩阵
calib_info:数据类型:CalibInfo
输出内容:相机RGB镜头的所有标定参数
功能演示
使用 LoadCalibFile 算子加载图漾相机的参数文件。
步骤1:算子准备
添加 Trigger、LoadCalibFile 算子至算子图。
步骤2:设置算子参数
设置 LoadCalibFile 算子参数:相机标定文件 → ![]() → ty_chessboard_calib.txt
→ ty_chessboard_calib.txt
步骤3:连接算子
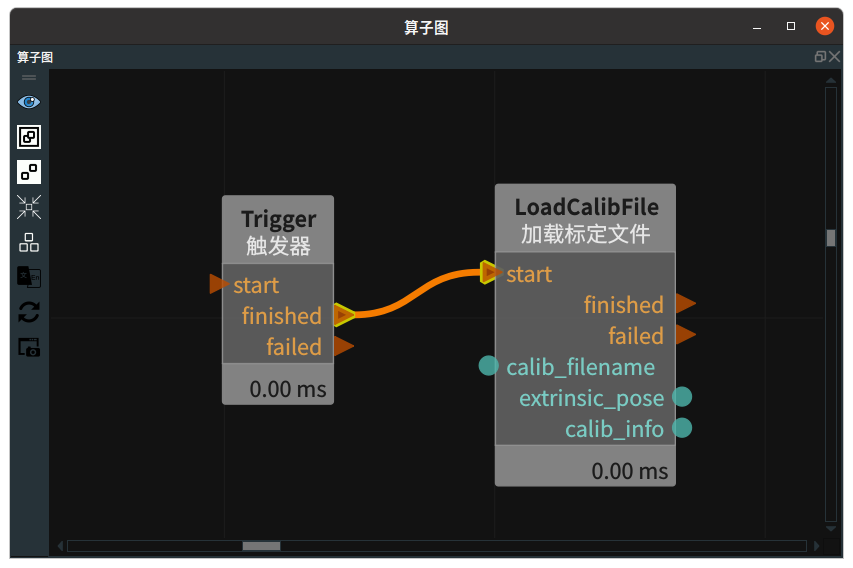
步骤4:运行
点击 RVS 的运行按钮,触发Trigger算子。 运行结果
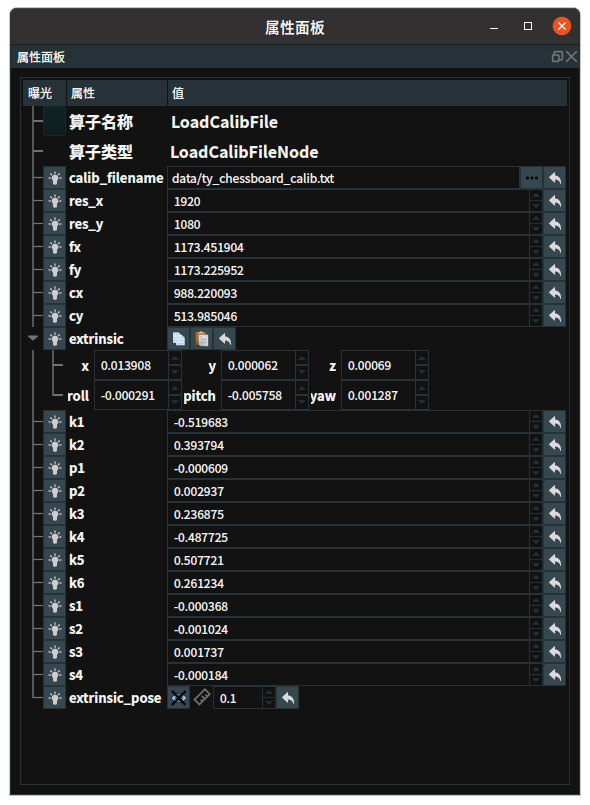
结果如下图所示,在属性面板中显示图漾相机的参数文件中读取相机内参(像素焦距、像素中心)、外参(RGB 镜头到 3D 镜头的转换矩阵)、畸变参数。