ProjectMask 映射图像Mask
ProjectMask 算子用于对 MaskRCNN、KeyPoint 以及 RotatedYOLO 神经网络模型推理所得的掩码图(目标 2D 像素区域)进行后续处理,将推理所得的掩码图列表转换为 3D 点云列表。
注解
算子运行前需准备推理得到的掩码图、图漾相机外参矩阵、目标物体3D点云。
| type | 功能 |
|---|---|
| MaskList | 将掩码图列表的所有目标同时转换成 3D 点云。支持按照类别转换。 |
| MaskClassList | 将类掩码图列表的所有目标同时转换成 3D 点云。支持按照类别转换。 |
MaskList
算子参数
相机坐标/camera_pose:手动设置 camera_pose 的 x/y/z/rx/ry/rz。作用同数据信号输入端口的 camera_pose 一致。若输入端口 camera_pose 有输入,执行算子后则会自动将输入端口的值覆盖该参数的值。相机彩色图标定文件/color_calib_file:设置图漾相机 RGB 镜头的出厂标定参数文件的路径。作用同数据信号输入端口的 color_calib_info 一致。若输入端口 color_calib_info 有输入,优先使用输入端口的值。输出背景点云/output_backgroud:是否输出背景点云。True:输出背景点云。算子参数显示背景点云,参数用于设置点云的可视化属性。数据信号输出端口显示backgroud_cloud,用于输出背景点云数据。False:不输出背景点云。
选择类别/select_class:如果仅需要将原始掩码图列表中的某一类目标进行 3D 转换,则这里填写对应的类别即可。该参数默认为空,即将所有类别全部转换。点云列表/cloud_list:设置点云列表在 3D 视图中的可视化属性。 打开点云列表可视化。
打开点云列表可视化。 关闭点云列表可视化。
关闭点云列表可视化。 设置3D视图中点云列表的颜色。取值范围:[-2,360]。默认值:-1。
设置3D视图中点云列表的颜色。取值范围:[-2,360]。默认值:-1。 设置点云列表中点的尺寸。取值范围:[1,50]。默认值:1。
设置点云列表中点的尺寸。取值范围:[1,50]。默认值:1。
说明
当 输出背景点云 → 是,显示下述参数。
点云列表/cloud_list:设置背景点云列表在 3D 视图中的可视化属性。- 打开背景点云列表可视化。
- 关闭背景点云列表可视化。
- 设置3D视图中背景点云列表的颜色。取值范围:[-2,360]。默认值:-1。
- 设置背景点云列表中点的尺寸。取值范围:[1,50]。默认值:1。
数据信号输入输出
输入:
cloud:数据类型:PointCloud
输入内容:掩码图的原图所对应的点云
说明
当输入的点云中背景点云占比较多时,建议将大部分背景点云裁剪后再输入。
camera_pose:数据类型:Pose
输入内容:掩码图的原图所在的 RGB 空间坐标系到上述点云所在的空间坐标系的转换关系。如果上述输入端口的点云位于相机3D坐标系,则这里输入RGB空间坐标系到相机3D坐标系的转换 Pose 即可。如果上述输入端口的点云位于机器人坐标系,则这里需要输入 RGB空间坐标系到机器人3D坐标系的的转换 Pose 。
color_calib_info:数据类型:CalibInfo
输入内容:图漾相机 RGB 镜头的出厂标定参数,可以从 TyCameraAccess 算子输出,也可以由 LoadCalibFile 算子输出。
mask_list:数据类型:ImageList
输入内容:神经网络推理算子所得的掩码图像列表
mask_names:数据类型:StringList
输入内容:神经网络推理算子所得的目标类别列表
输出:
cloud_list:数据类型:PointCloudList
输出内容:将掩码图列表中的目标转换到 3D 坐标系后的点云列表
说明
当 输出背景点云 → 是,显示下述输出端口。
background_cloud:数据类型:PointCloud
输出内容:背景点云
功能演示
使用 ProjectMask 算子的MaskList模式 ,将掩码图列表的所有目标同时转换成 3D 点云,输出 PointCloudList 。
步骤1:算子准备
添加 Trigger( 3 个)、Load( 2 个)、LoadCalibFile、AIDetectGPU、ProjectMask 算子至算子图。
步骤2:设置算子参数
设置 Trigger_1 算子参数:
算子名称→Init_Trigger
类型 → InitTrigger
设置 Trigger_2 算子参数:
算子名称→AI_Trigger
类型 → InitTrigger
设置 Load 算子参数:
类型 → Image
文件 →
 →选择图像文件名 ( example_data/mask_data_train/20221010113840917/rgb.png )
→选择图像文件名 ( example_data/mask_data_train/20221010113840917/rgb.png )图像 →
可视
设置 Load_1 算子参数:
类型 → PointCloud
文件 →
→ 选择与图像匹配点云文件名 ( example_data/mask_data_train/20221010113840917/cloud.pcd )点云 →
可视
设置 LoadCalibFile 算子参数:
相机标定文件 → 图漾相机出厂标定文件 ( example_data/mask_data_train/mask_ty_color_calib.txt )
设置 AIDetectGPU 算子参数:
说明
该端口连接/不连接,输出所有类别的旋转矩阵。连接时,可填写 select_class 来输出指定类别的旋转矩形。
类名文件路径 →
→ 选择相应文件名( example_data/mask_data_train/fruits.txt )权重文件路径 →
→ 选择相应权重文件名 ( example_data/mask_data_train/train_output/model_final.pth )配置文件路径 →
→ 选择相应权重文件名 ( example_data/mask_data_train/train_output/config.yaml )物体得分阈值 →
→ 0.75识别结果图像 →
可视
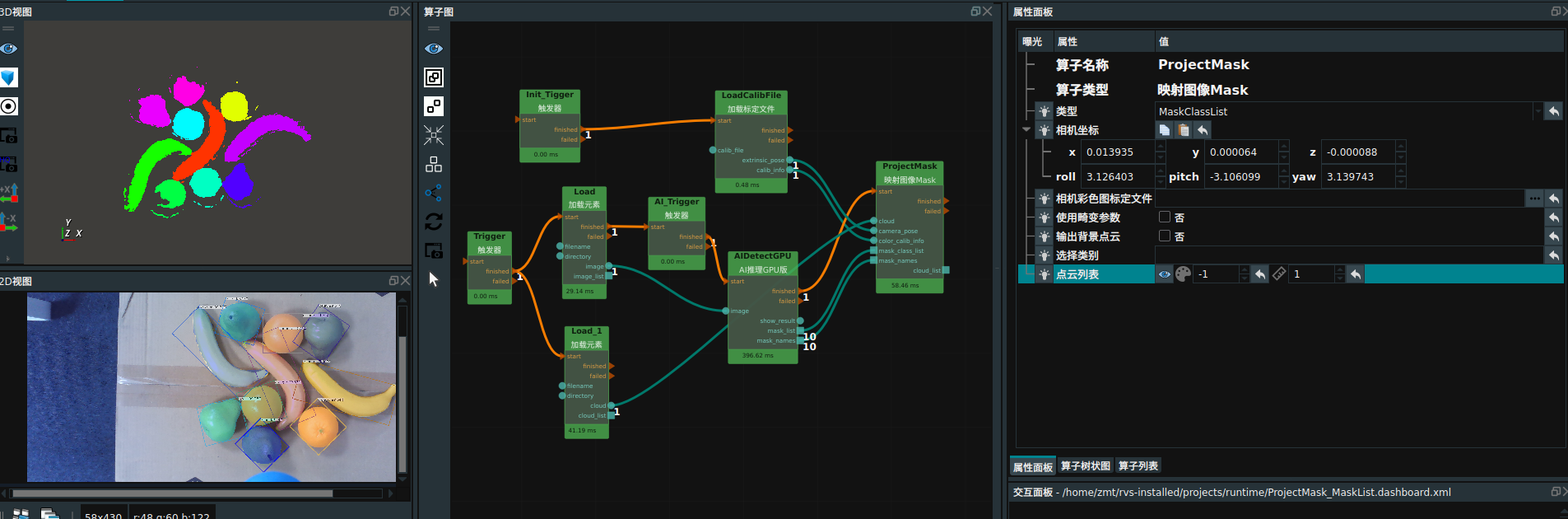
设置 ProjectMask 算子参数:
类型→ MaskList
点云列表 →
可视
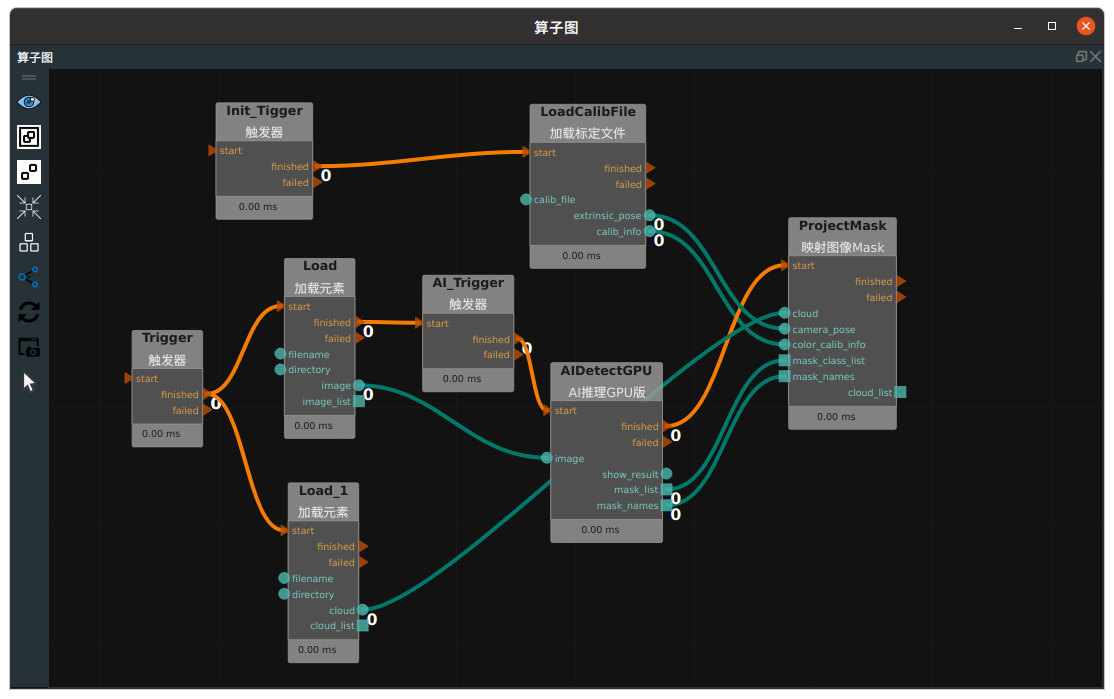
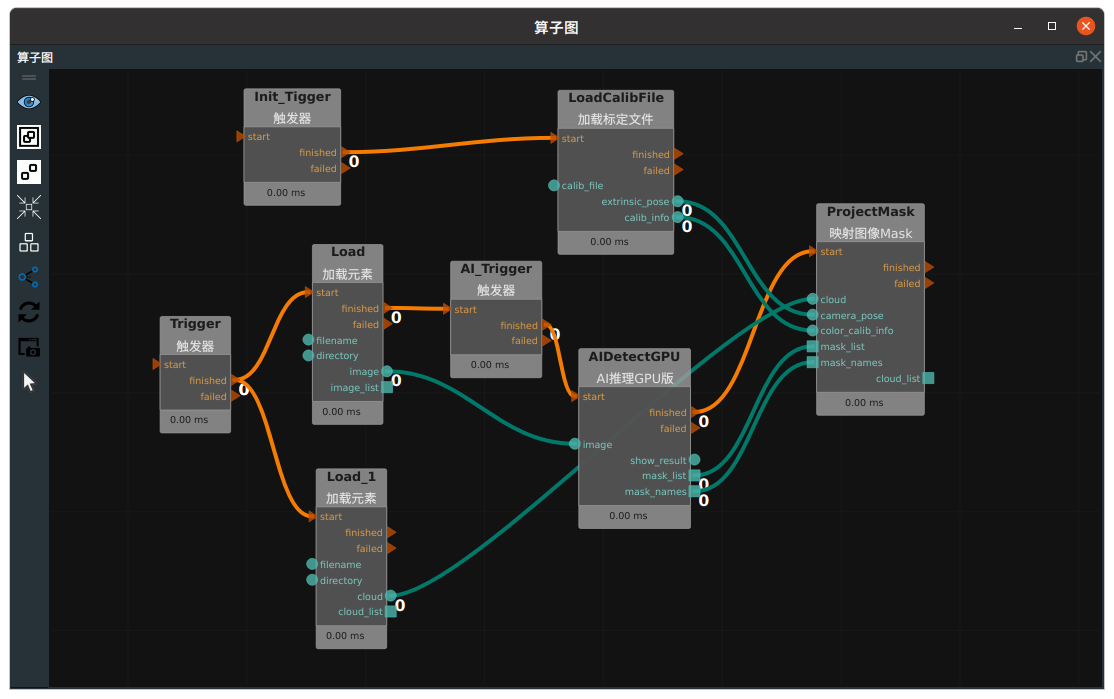
步骤3:连接算子
步骤4:运行
点击RVS的运行按钮,InitTrigger 和AI_Trigger 会自动运行,分别触发 LoadCalibFile 算子以及 AIDetectGPU 。然而,AIDetectGPU 算子的初始化同时会通过finished 端口触发后续的 ProjectMask 算子。由于 ProjectMask 算子的输入端口没有有效数值,因此会报告一个端口输入无效的警告。这个警告不会影响后续的运行。如下图所示。

正常运行触发左侧 Trigger 算子。
运行结果
如果勾选了AIDetectGPU算子的
识别结果图像参数以及 ProjectMask 算子的点云列表属性的可视化选项,则会显示一个包含点云和掩膜的三维可视化结果。其中,点云的颜色表示掩膜的值,即蓝色表示掩膜值为 0,白色表示掩膜值为 1。掩膜将点云分割成不同的区域,以便进行后续的处理和分析。如下图所示。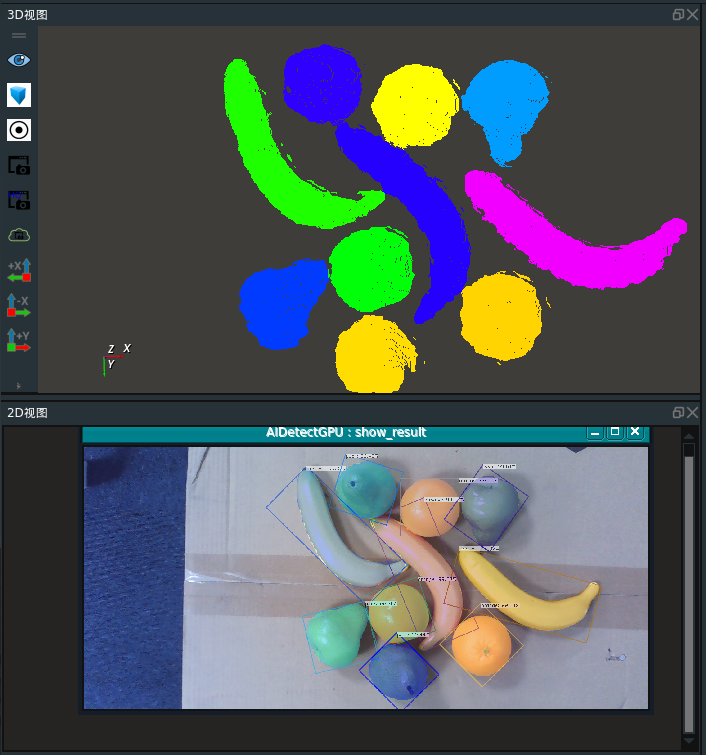
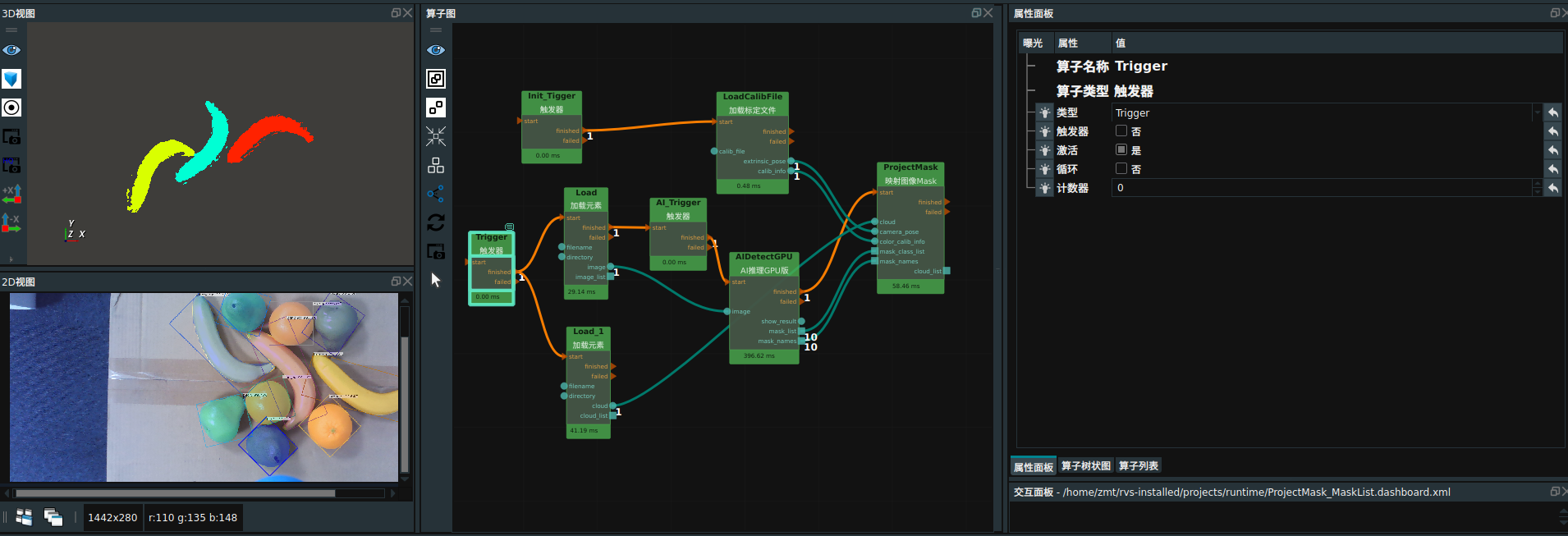
如果在 ProjectMask 算子的
选择类别属性中填写了某个具体的类别,比如 banana ,则还额外需要将 AIDetectGPU 算子的 mask_names 端口连接到ProjectMask 算子的 mask_names 端口,运行效果如下所示。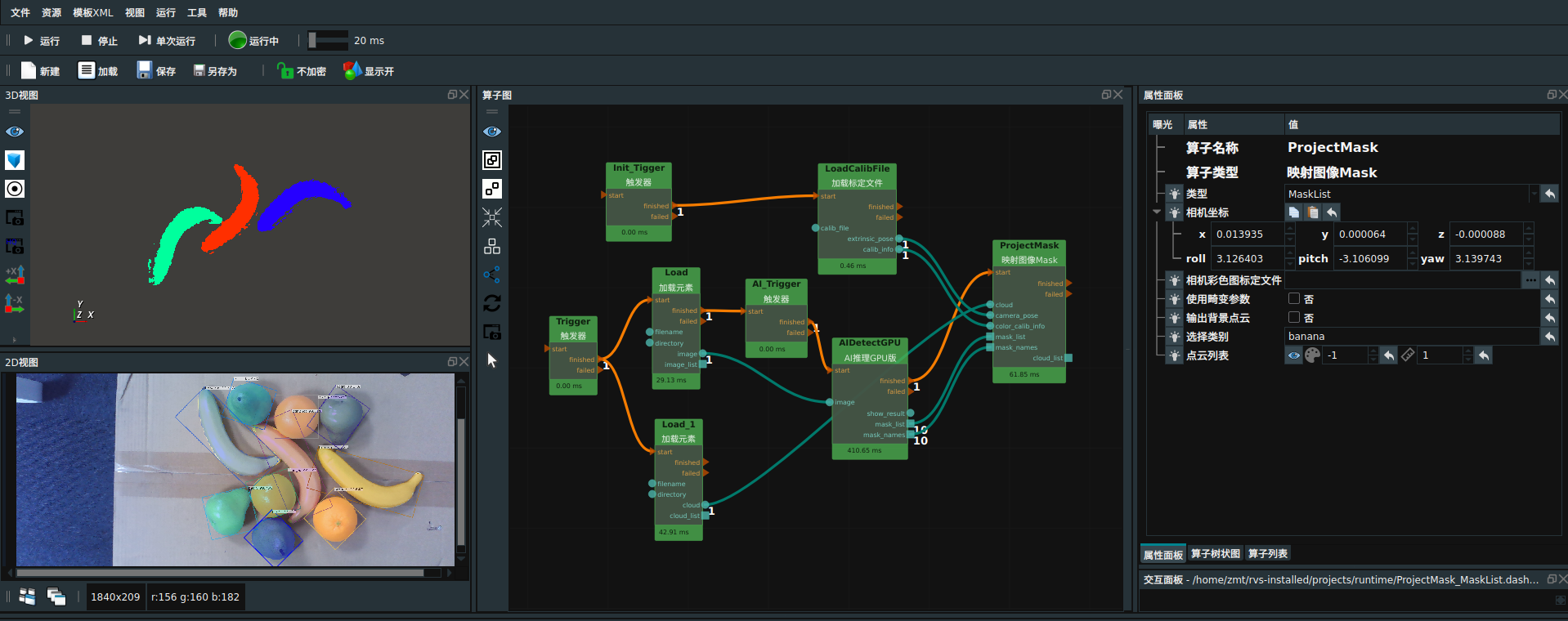
MaskClassList
将 ProjectMask 算子的 类型 属性选择 MaskClassList ,将类掩码图转换成 3D 点云列表并输出。
算子参数
所有参数:同上述 MaskList 。
数据信号输入输出
输入:
mask_class_list:数据类型:Image
输入内容:神经网络推理算子在 Class 模式下 ( MaskRCNNClass 以及 YOLOClass ) 所得的类掩码图列表
其余端口:同上述MaskList 描述一致
输出:
cloud_list:数据类型:PointCloud
输出内容:将类掩码图中的目标转换到 3D 坐标系中的点云
功能演示
使用 ProjectMask 算子中 MaskClassList 模式,分别将所有类掩码图以及单个类掩码图 (类别仍然选为banana) 的目标转换成 3D 点云。
算子连接参照 MaskList ,连接细节以及两次运行结果图如下所示。