手眼标定工具
点击菜单栏中手眼标定工具即可打开手眼标定工具窗口。

手眼标定介绍
手眼标定是指在相机安装完成后,计算出相机同机器人的坐标转换矩阵,目的是根据这个坐标转换矩阵将相机坐标系下拍摄的点云转换到机器人坐标系下。根据相机安装方式,手眼标定分为两种情形:

-
眼在手上(EyeInHand):相机安装在机械臂末端,标定板固定位置不动,标定相机和机械臂末端的转换矩阵。手眼组合体变换姿态拍摄标定板。
-
眼在手外(EyeToHand):相机(吊顶)固定安装,标定板固定在机械臂上,标定相机和基底坐标系的关系矩阵。机械臂变换姿态,相机拍摄不同姿态的标定板。
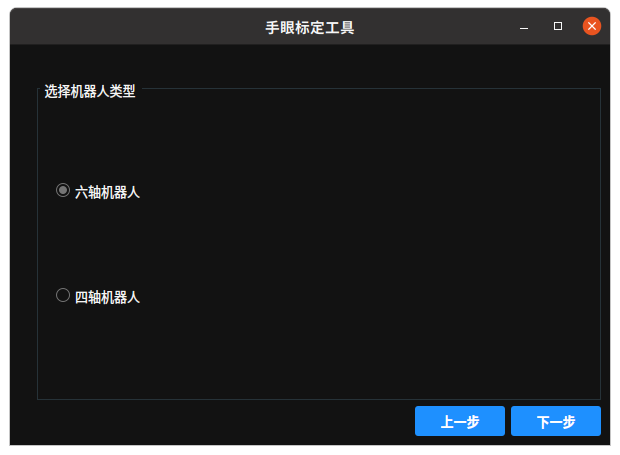
机器人类型介绍
选择机器人类型时,包含以下两种类型:
-
六轴机器人:具备六个自由度,能够在三维空间中执行复杂的路径规划和姿态调整,适用于焊接、装配等需要高精度和灵活性的任务。
-
四轴机器人:拥有四个自由度,以其快速的操作速度和简单的结构,适合搬运、码垛和包装等简单的平面任务。
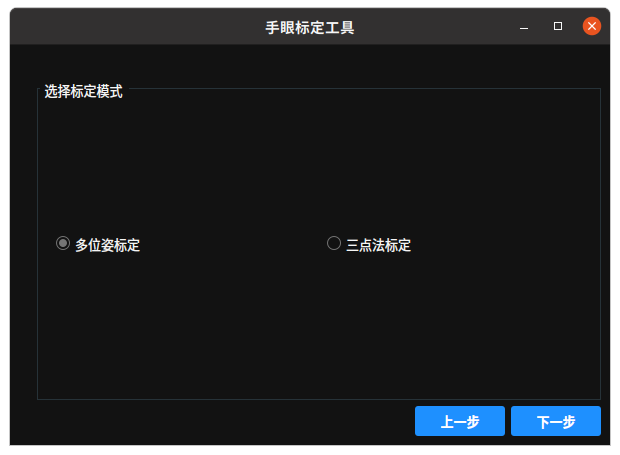
标定模式介绍
选择标定模式时,包含以下两种方法:
-
多位姿标定:通过在多个不同的姿态下采集数据,能够提高标定的精度,适用于需要高精度的应用场景。
-
三点法标定:使用三个已知位置的点进行快速标定,操作简单且速度快,适合对精度要求不高的场合。
设置相机
设置相机界面用于连接相机、调整相机参数和配置标定参数等操作。
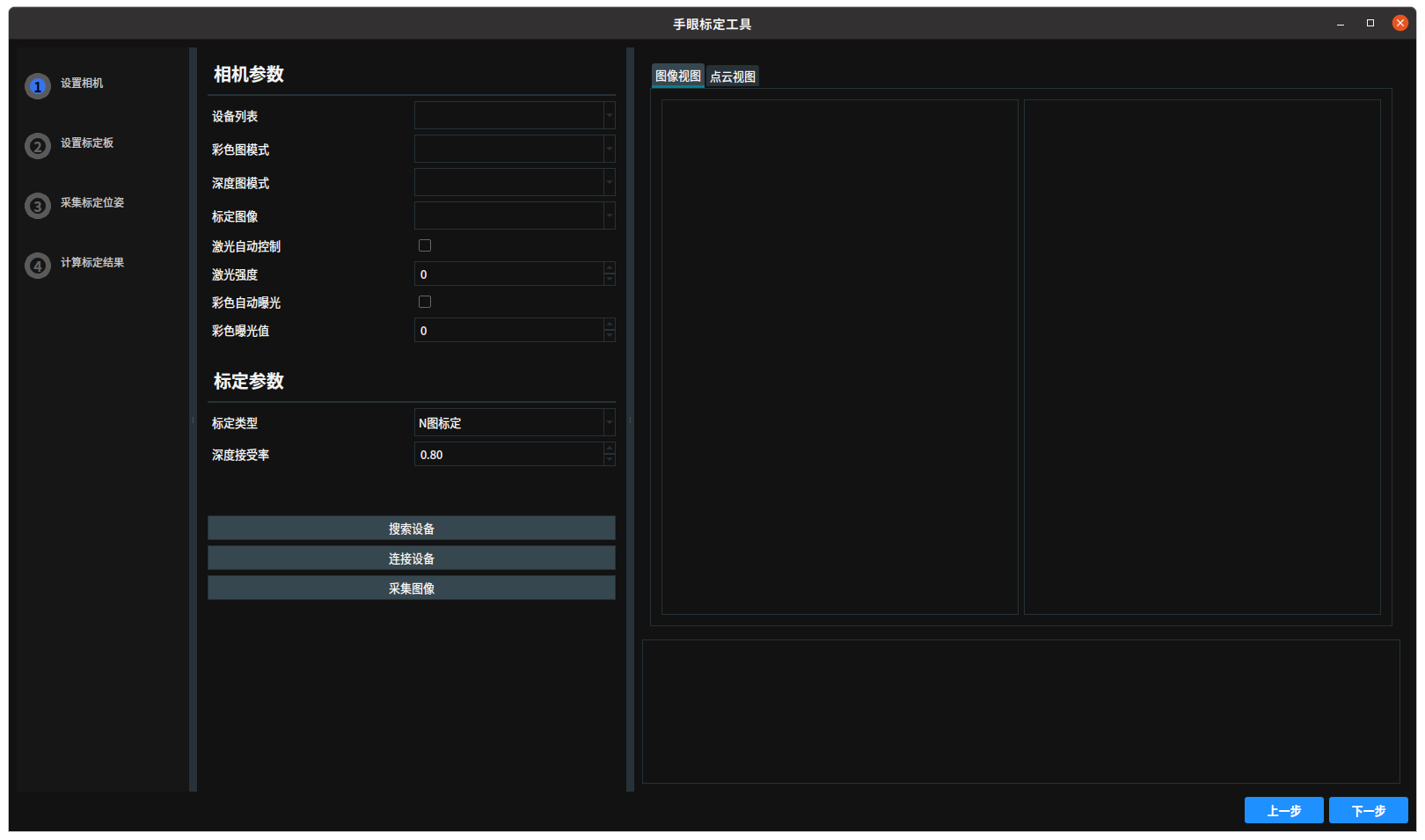
相机参数
-
设备列表:显示当前可用的相机设备。通过点击搜索设备按钮,可以刷新并查看所有连接的相机。 -
彩色图模式:选择用于捕获彩色图像的模式。 -
深度图模式:选择用于捕获深度图像的模式。 -
标定图像:-
Color:使用彩色图像标定。
-
LeftIR:使用左红外图像标定。
-
-
激光自动控制:控制激光的工作模式。-
是:激光强度根据环境自动调整。 -
否:手动设置激光强度。
-
-
激光强度:设置激光强度。取值范围:[0,100]。 -
彩色自动曝光:彩色自动曝光模式。-
是:相机自动调整曝光以适应光照条件。 -
否:手动设置曝光值。
-
-
彩色曝光值:当彩色自动曝光关闭时,手动设置彩色相机的曝光值。用于调整图像亮度。
标定参数
-
标定类型:-
N图标定:使用深度图和彩色图进行标定,提高标定的精度和稳定性。适用于需要高精度的场景。 -
彩色图标定:使用彩色图像进行标定。
-
-
深度接受率:指在深度图像中有效深度数据的比例。
按钮
-
搜索设备:搜索并显示可用的相机设备。 -
连接设备:连接到选定的相机设备。 -
采集图像:从相机采集图像数据。 -
上一步:跳转至选择标定模式界面。 -
下一步:跳转至设置标定板界面。
设置标定板
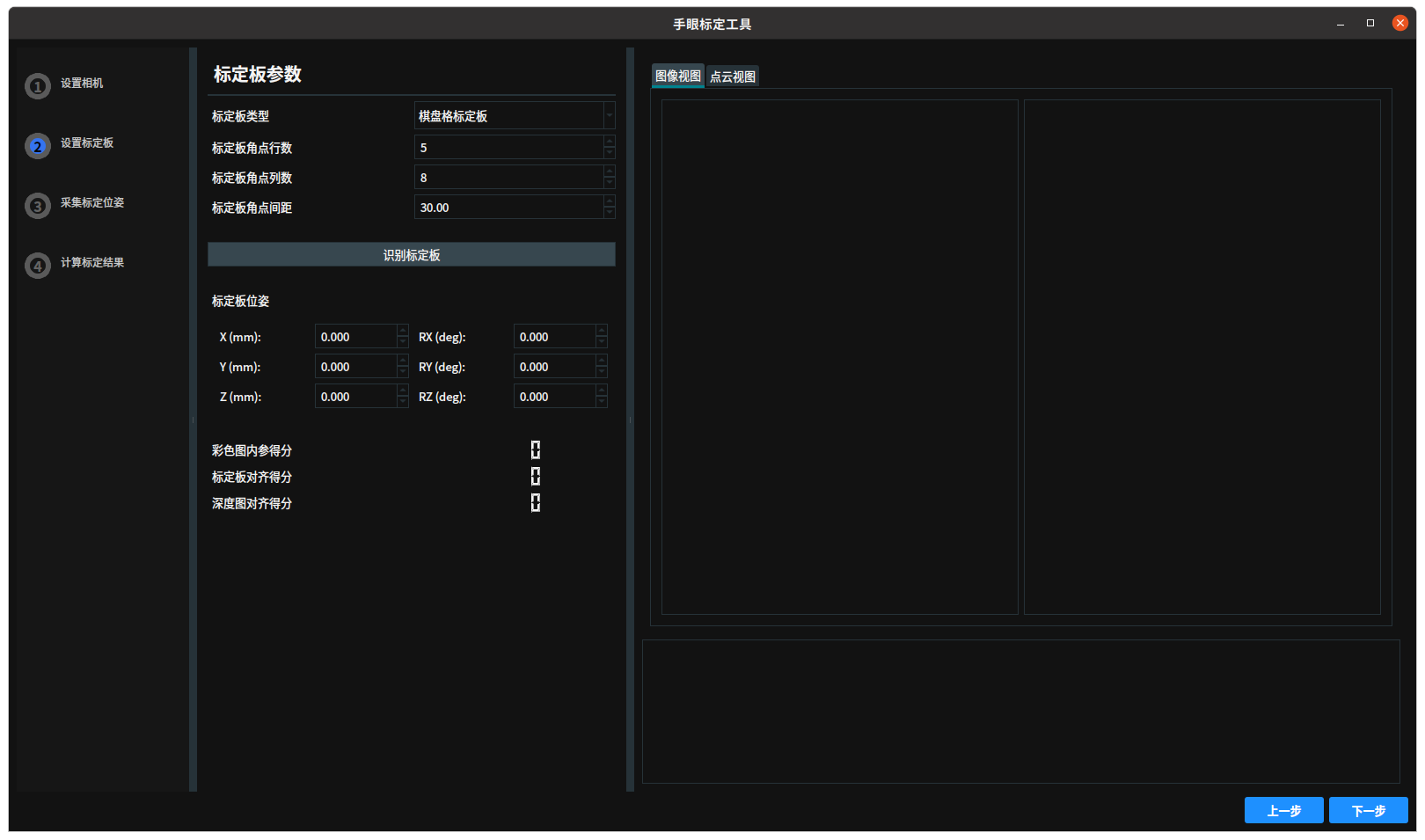
标定板参数
-
标定板类型:当选择棋盘格标定板时,需要设置以下参数:
-
标定板角点行数:棋盘格在垂直方向上的角点数量。 -
标定板角点列数:棋盘格在水平方向上的角点数量。 -
标定板角点间距:相邻角点之间的物理距离,单位:mm。
-
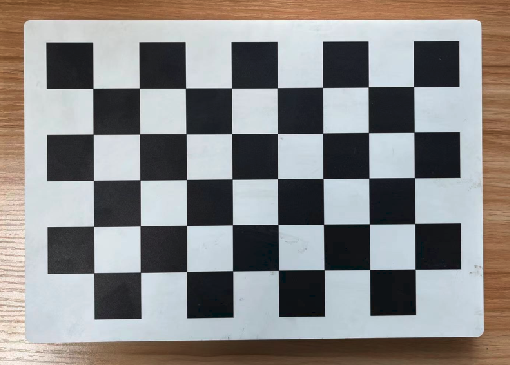
棋盘格标定板
准备棋盘格标定板时,需要确认以下内容:
-
棋盘格的行列数应为一奇一偶
-
确认棋盘格的尺寸
-
确保棋盘格的面积符合相机的视野范围
以下是 RVS 手眼标定支持的标定板的示例图片。
-
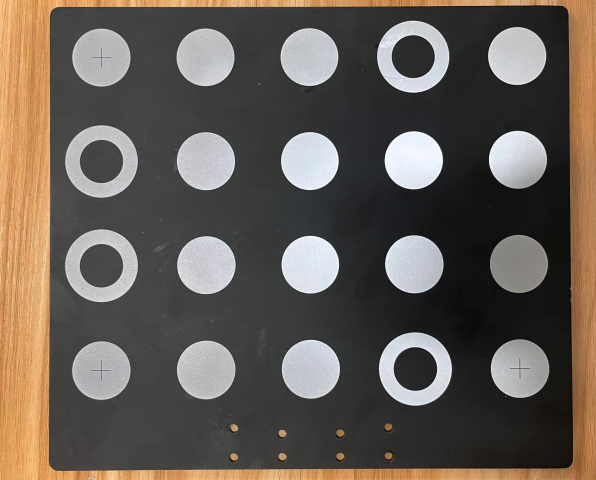
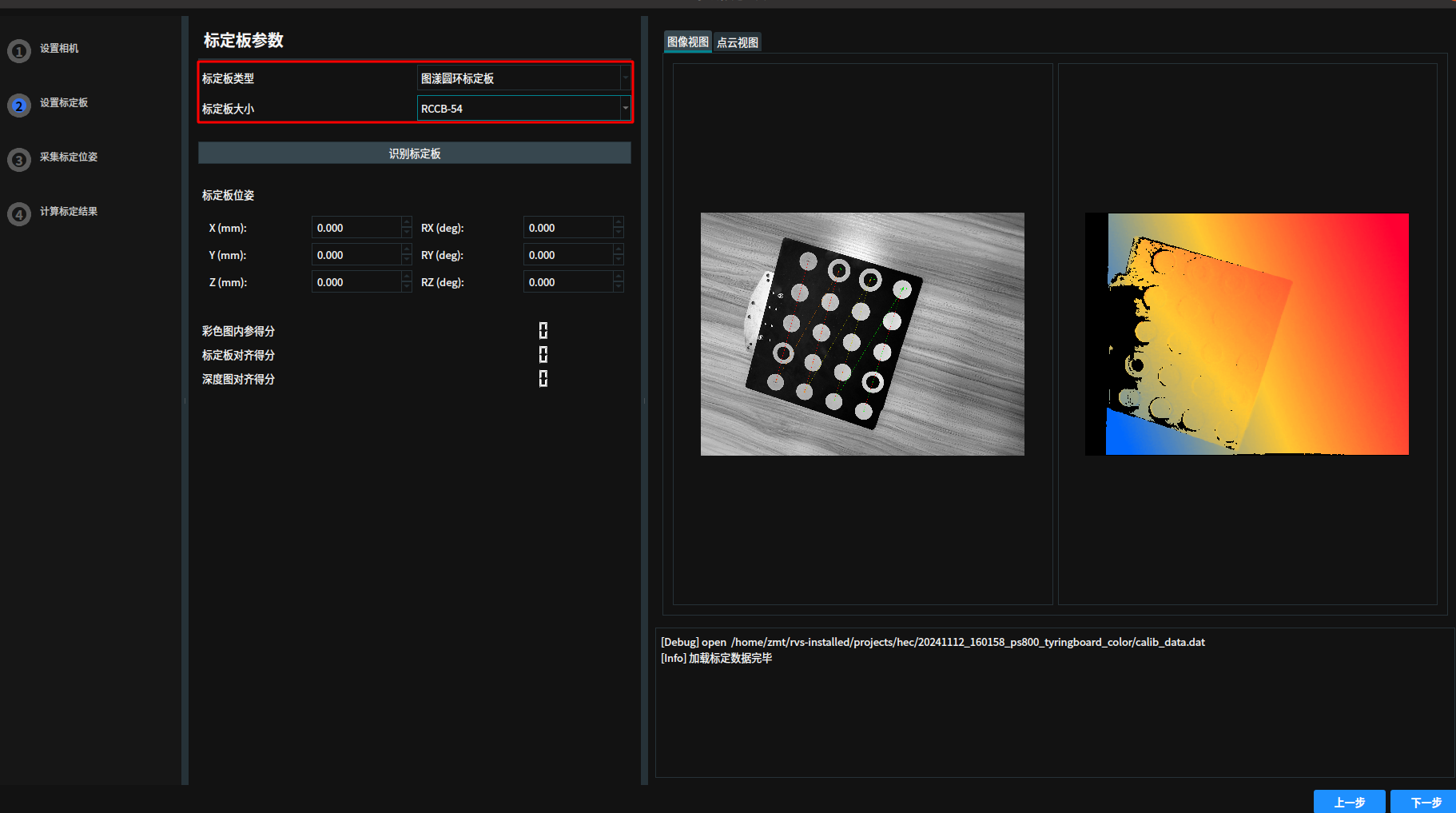
图漾圆环标定板当选择
图漾圆环标定板时,要设置以下参数:-
标定板大小:可以根据以下尺寸进行选择: -
RCCB-28:相邻圆中心点的距离为28毫米。
-
RCCB-54:相邻圆中心点的距离为54毫米。
-
RCCB-88:相邻圆中心点的距离为88毫米。
-
RCCB-140:相邻圆中心点的距离为140毫米。
-
图漾圆环标定板示例图片:
-
识别标定板按钮:点击后自动识别标定板上的特征点(如棋盘格角点或圆环中心)。 -
标定板位姿:标定板在相机视野中的位置和方向。 -
彩色图内参得分:评估彩色相机内参标定的精度。 -
标定板对齐得分:评估标定板在图像中的识别和对齐精度。 -
深度图对齐得分:评估深度图与标定板的对齐精度。 -
上一步:点击后跳转至设置相机界面。 -
下一步:点击后跳转至采集标定位姿界面。
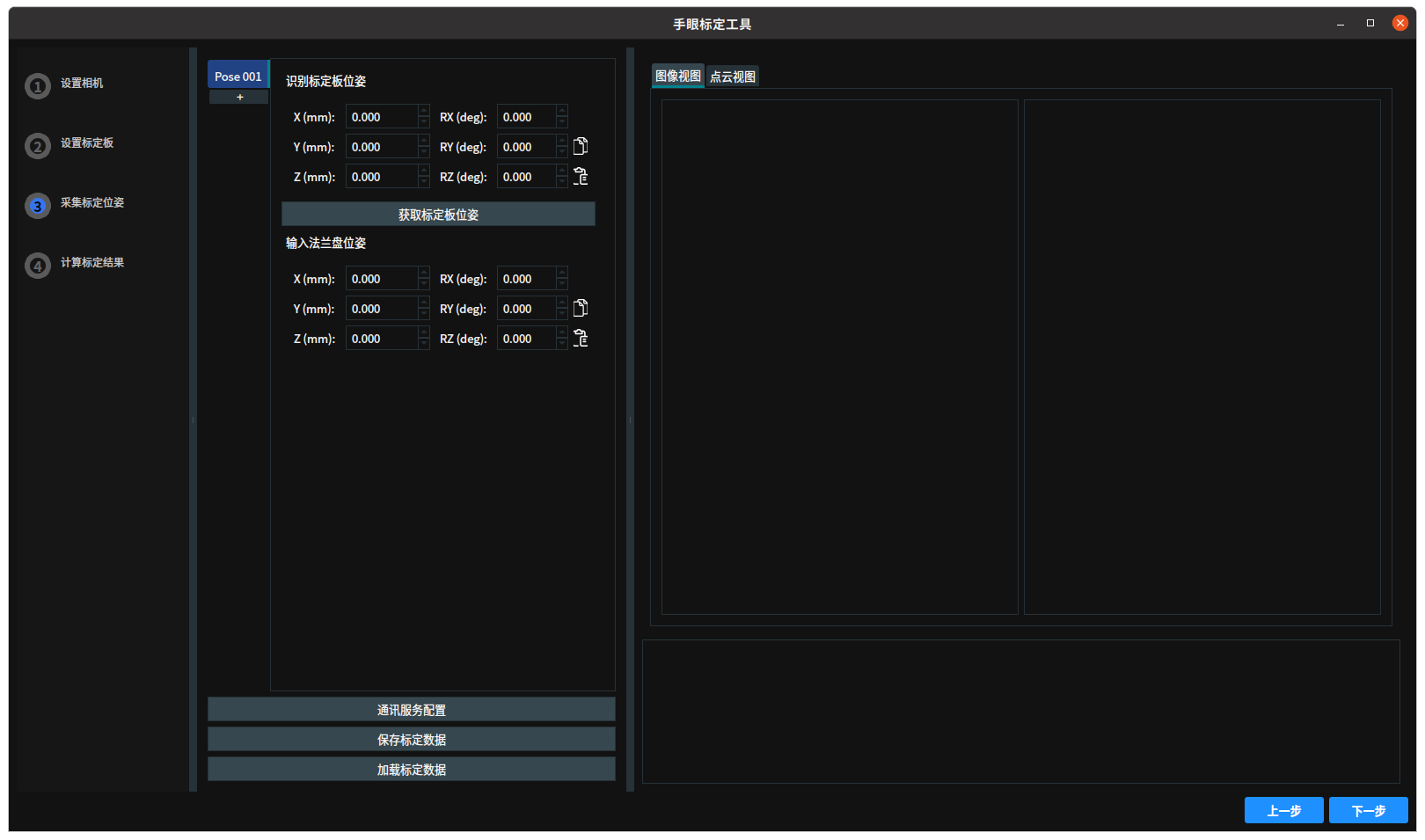
采集标定位姿
-
Pose 001:标定过程中的一组位姿。 -
识别标定板位姿:标定板在相机视野中的位置和方向。 -
获取标定板位姿按钮:点击后获取标定板位姿。 -
输入法兰盘位姿:与机器人发送的法兰盘位姿。若不使用通讯,可手动输入法兰盘位姿。 -
通讯服务配置:-
端口:服务器监听的端口号。 -
分隔符:用于将收到的数据按此分隔符分割为数组并赋值为Pose或JointArray数据。该数据分隔符为字符串类型,因此可以使用” “(空格),”abc”(任意字符串),”!@#$%”(任意常见字符)。 -
启动:启动通讯服务,使服务器开始监听和处理请求。 -
停止:停止通讯服务。 -
回复消息:服务器在接收到请求后发送的响应消息。 -
服务器状态:显示当前服务器的运行状态(如启动或停止)和接收与回复的消息。 -
自动触发:当勾选后,自动添加一组位姿。
-
-
保存标定数据:将当前的标定结果保存到文件或数据库中,以便后续使用。 -
加载标定数据:从文件中加载之前保存的标定结果。 -
上一步:点击后跳转至设置标定板界面。 -
下一步:点击后跳转至标定结果界面。
计算标定结果
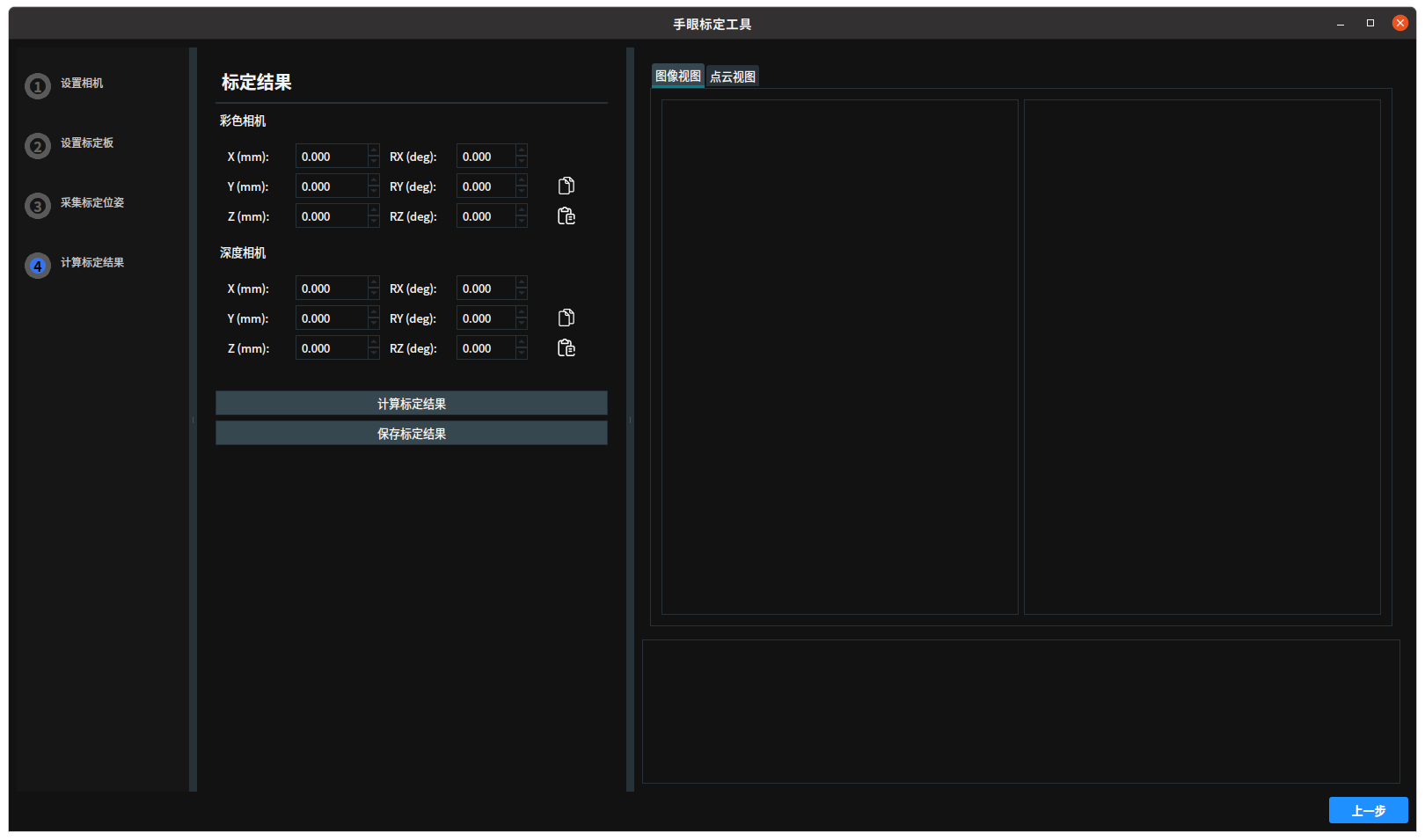
标定结果
-
彩色相机:输出彩色相机标定参数。 -
深度相机:输出深度相机标定参数。 -
计算标定结果:单击后计算标定结果。 -
保存标定结果:单击后将标定结果保存至指定目录中。 -
标定全角点均方差(毫米):标定过程中,所有角点的测量误差的均方根值。通常需要在合理的范围内,具体值依赖于应用场景和设备的精度要求。 -
上一步:点击后跳转至计算标定位置界面。
手眼标定演示
棋盘格手眼标定
使用棋盘格标定板进行眼在手外安装的六轴机器人多位姿手眼标定。
标定配置
-
打开
手眼标定工具,选择标定情景、机器人类型、标定模式。-
标定情景:眼在手外,点击
下一步。
-
机器人类型:六轴机器人,点击
下一步。
-
标定模式:多位姿标定,点击
下一步。
-
设置相机
-
进入
设置相机界面。点击搜索设备按钮,找到需要进行手眼标定的相机。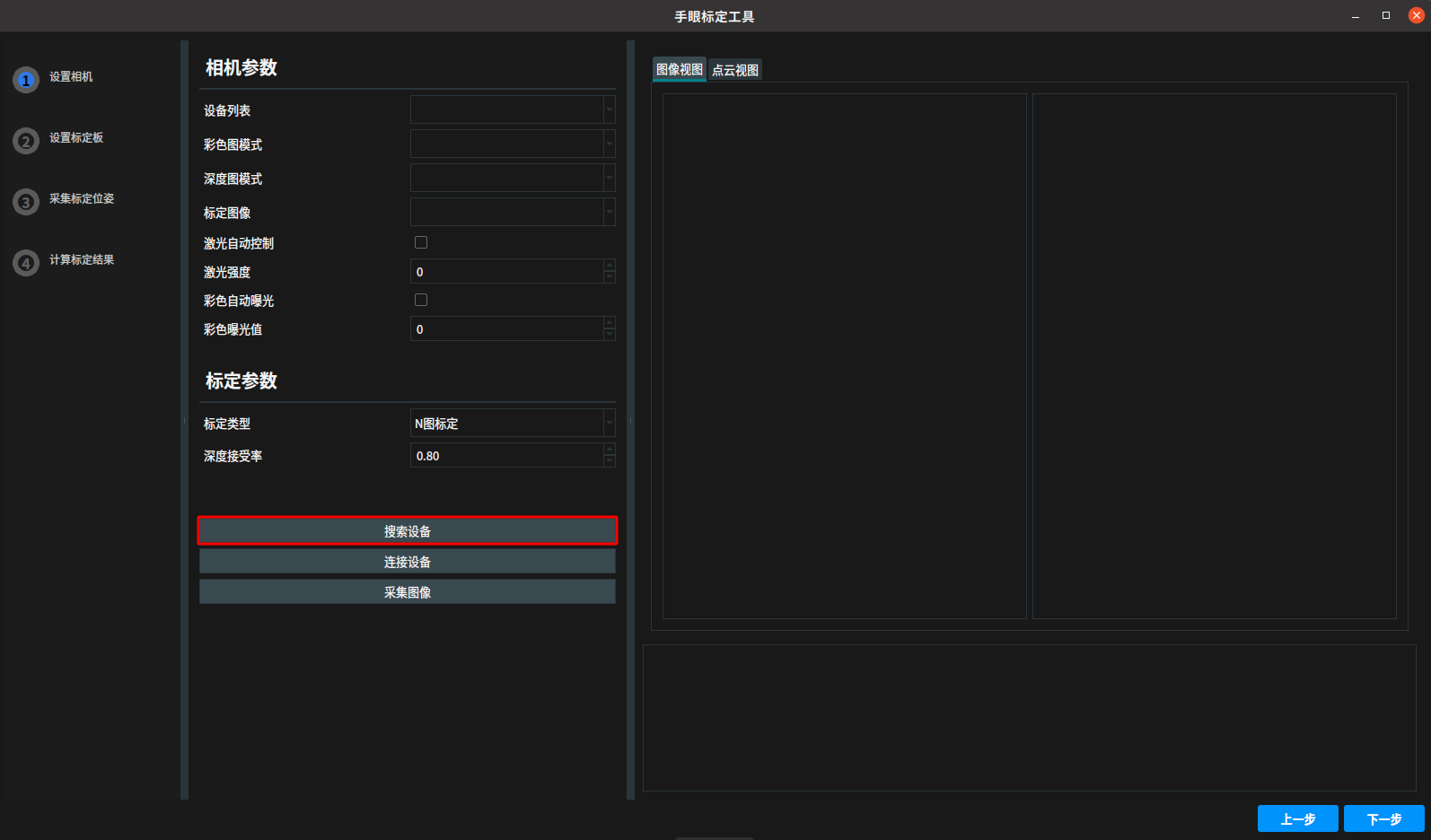
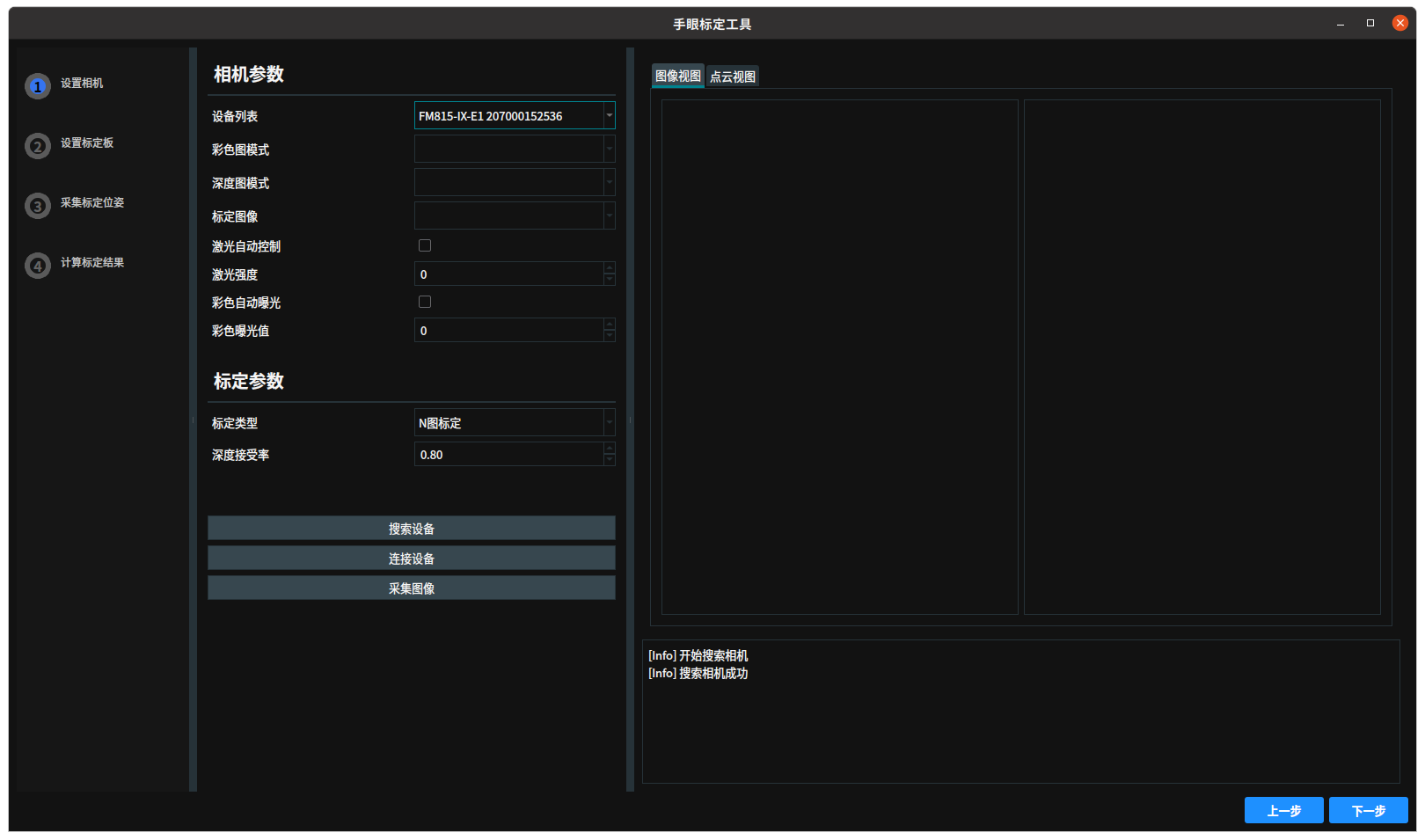
-
在日志栏显示搜索相机成功,同时设备列表显示搜索到的设备。
若连接失败,请参考 RVS 连接不上相机怎么办?
-
点击
连接设备按钮,连接相机成功后在相机参数栏显示相机的参数。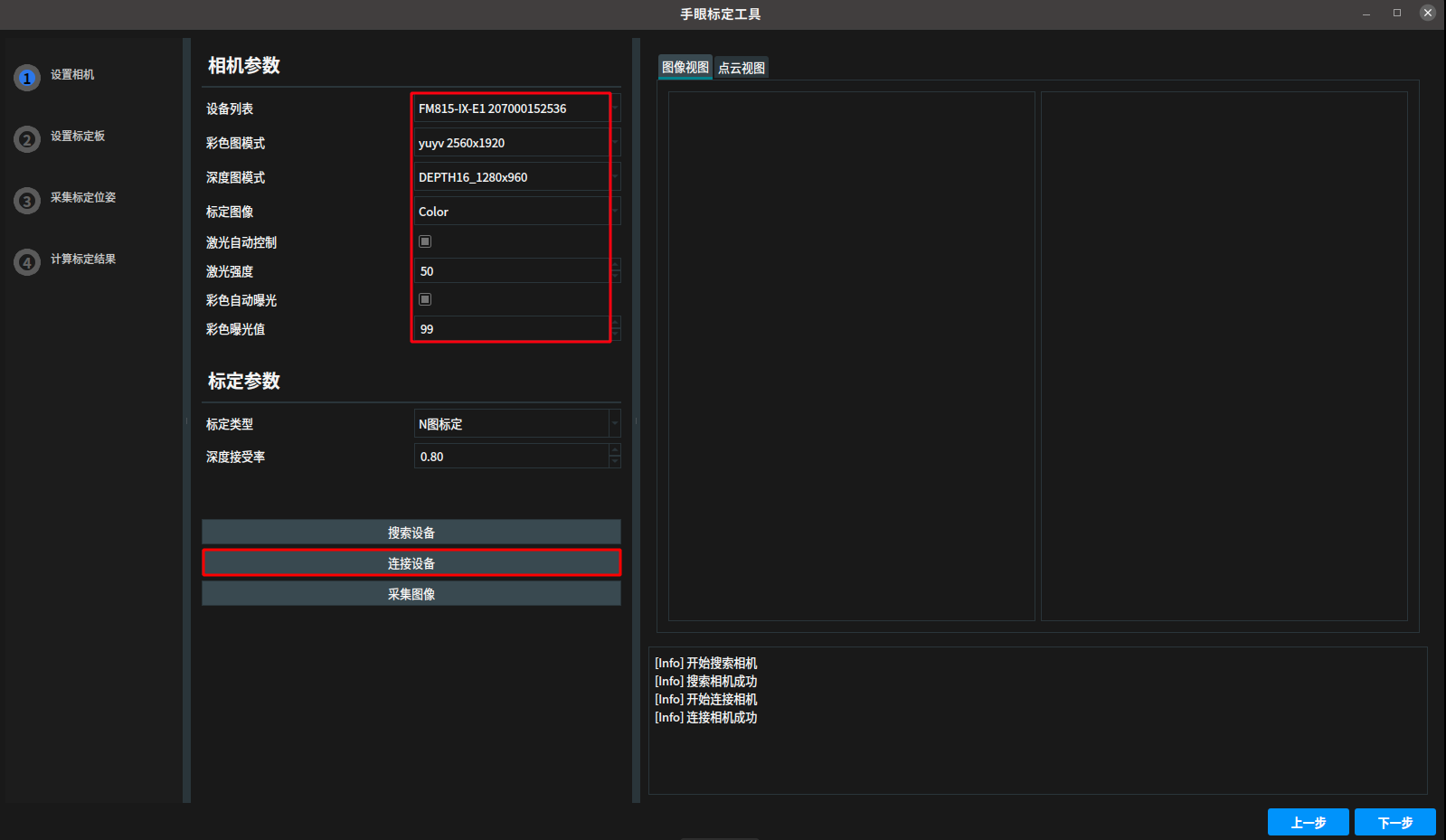
-
点击
采集图像以在视图中显示获取的彩色图像和深度图像。如果成像质量不理想,可以在相机参数栏中调整激光强度和彩色曝光值以优化效果。同时,设置标定参数栏中的参数以便进行后续的标定操作。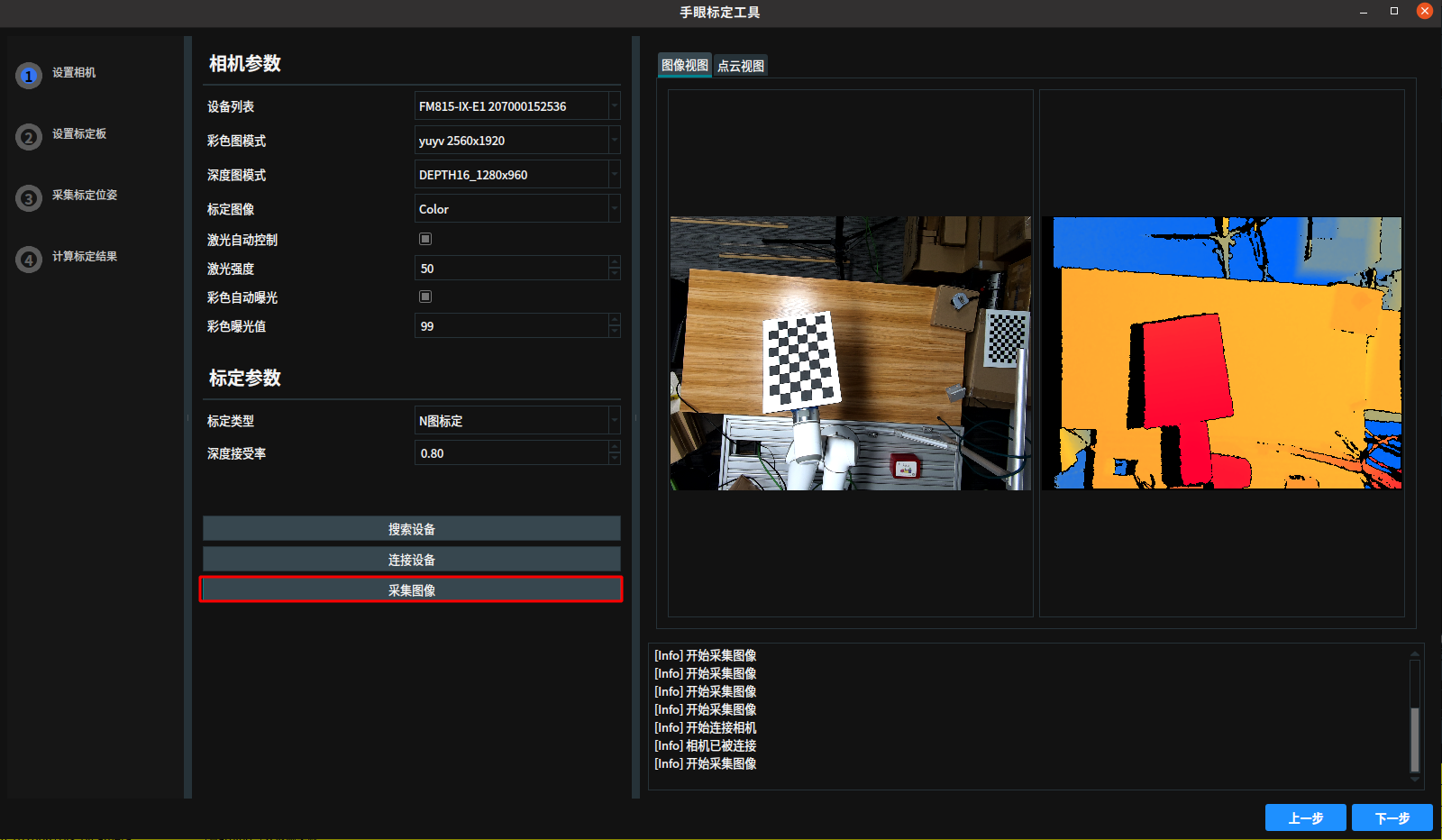
设置标定板
-
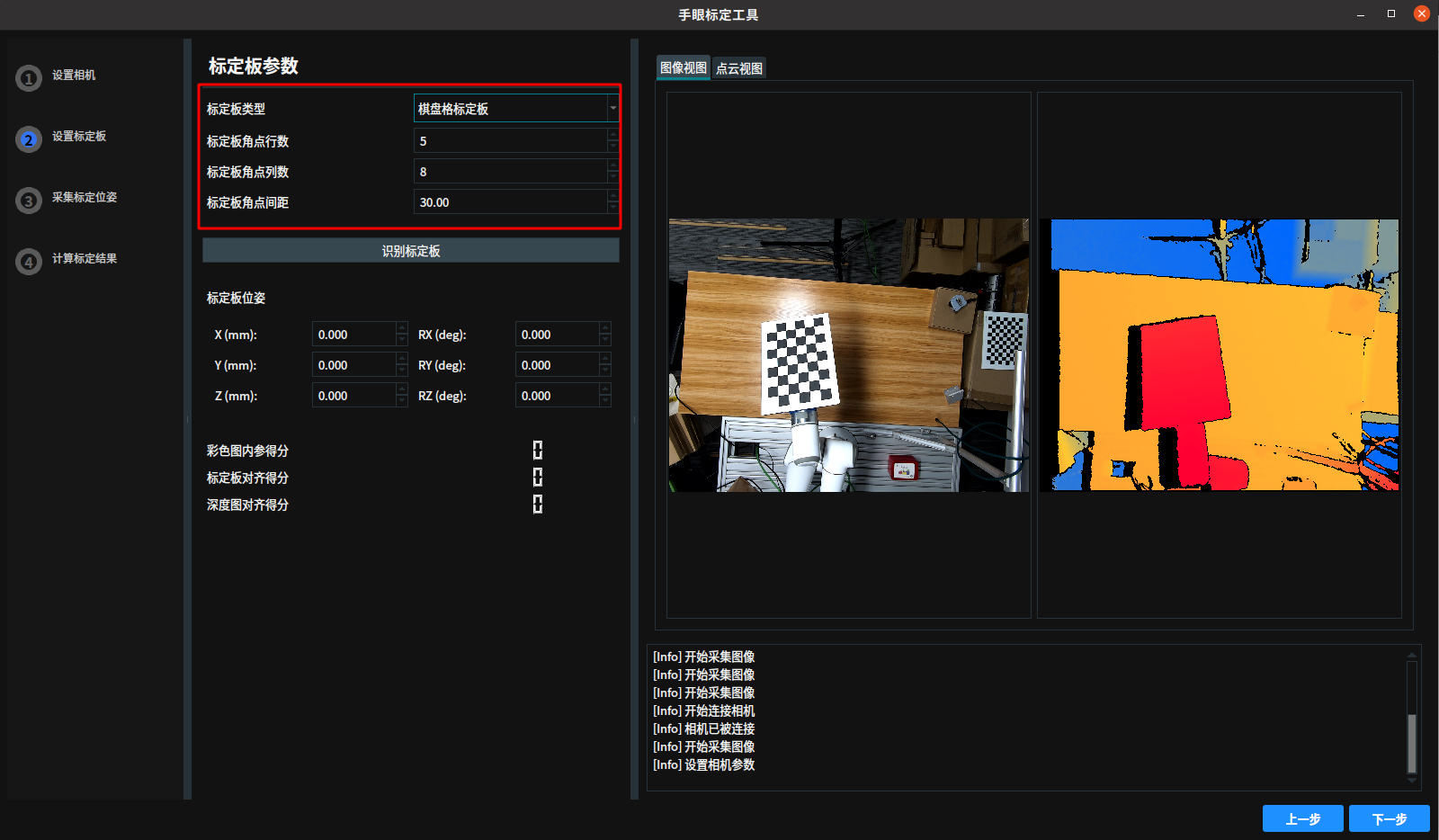
当相机参数与标定参数设置完成后,点击
下一步设置标定板。进入
设置标定板界面后,进行参数设置:-
标定板类型:棋盘格标定板
-
标定角点行数:5
-
标定板角点列数:8
-
标定板角点间距:30
-
-
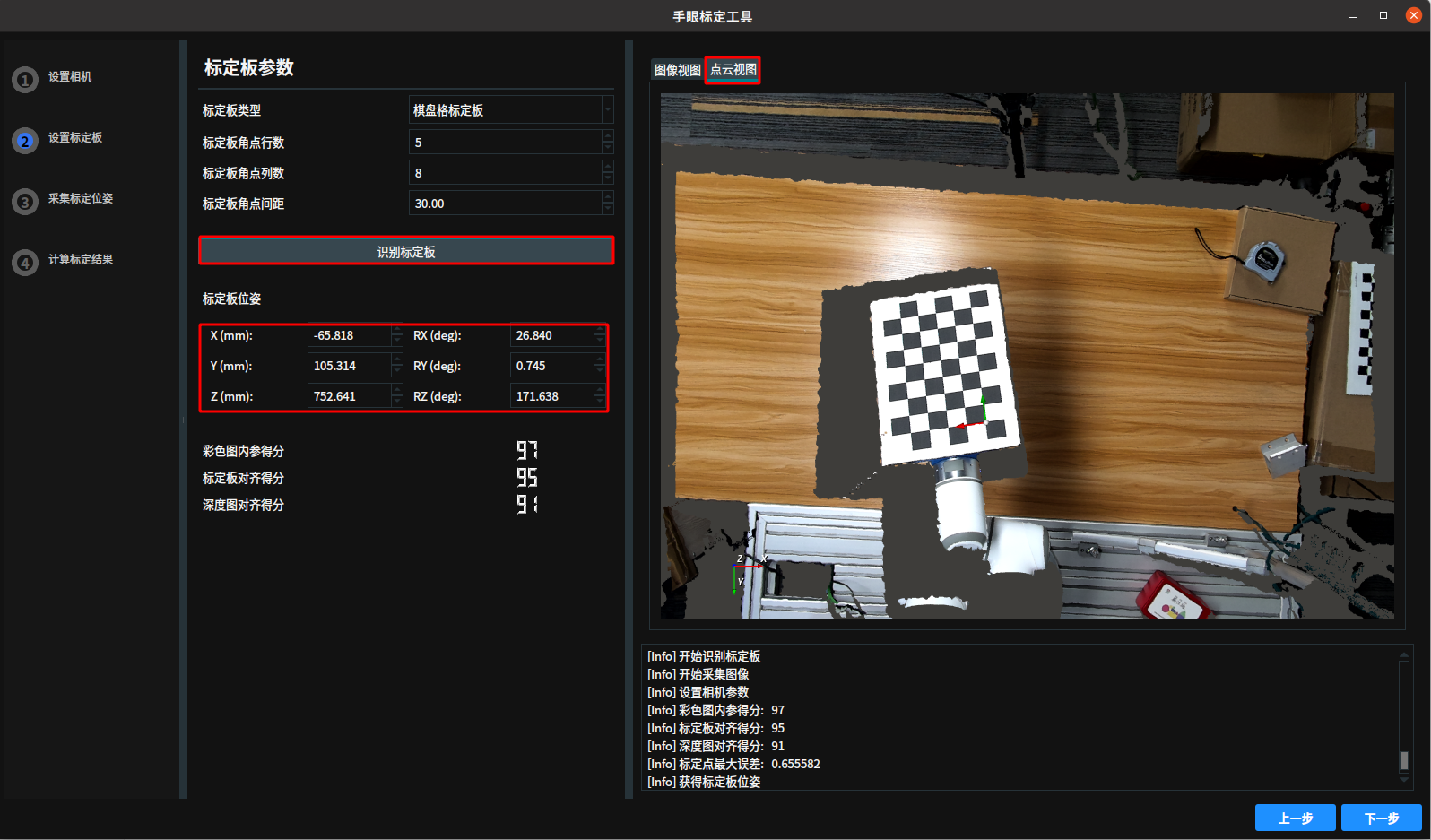
点击
识别标定板按钮以获取标定板的位姿。-
查看点云视图:切换到
点云视图以检查标定板的位姿是否与标定板的角点重合。 -
检查得分:
-
彩色图内参得分:应在90以上。
-
标定对齐得分:应在90以上。
-
深度图对齐得分:应在90以上。
-
-
获取标定板位姿
-
点击
下一步进入采集标定位姿界面。点击获取标定板位姿按钮。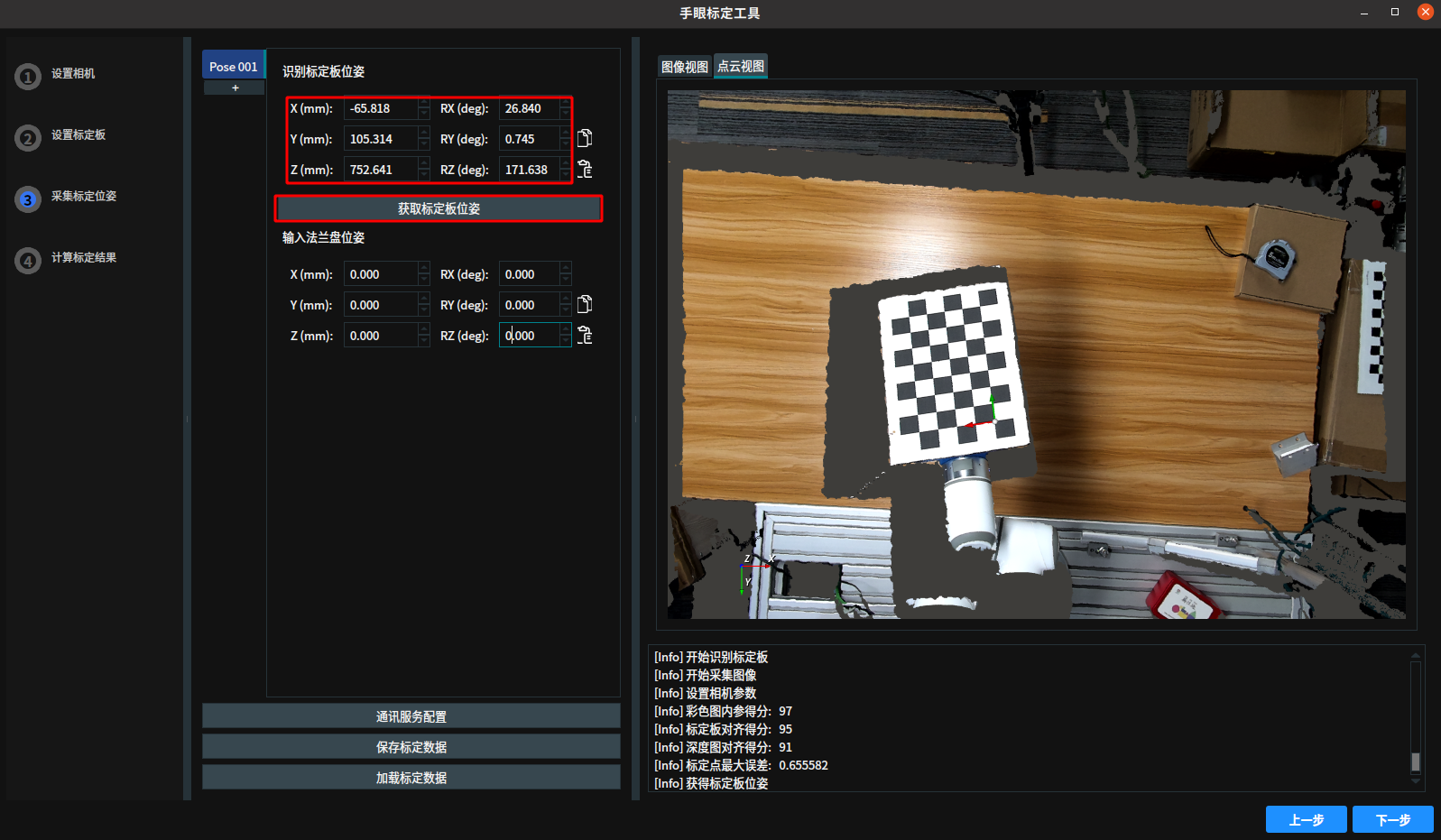
获取法兰盘位姿
-
点击
通讯服务配置,配置端口号与分隔符。点击启动启动通讯服务。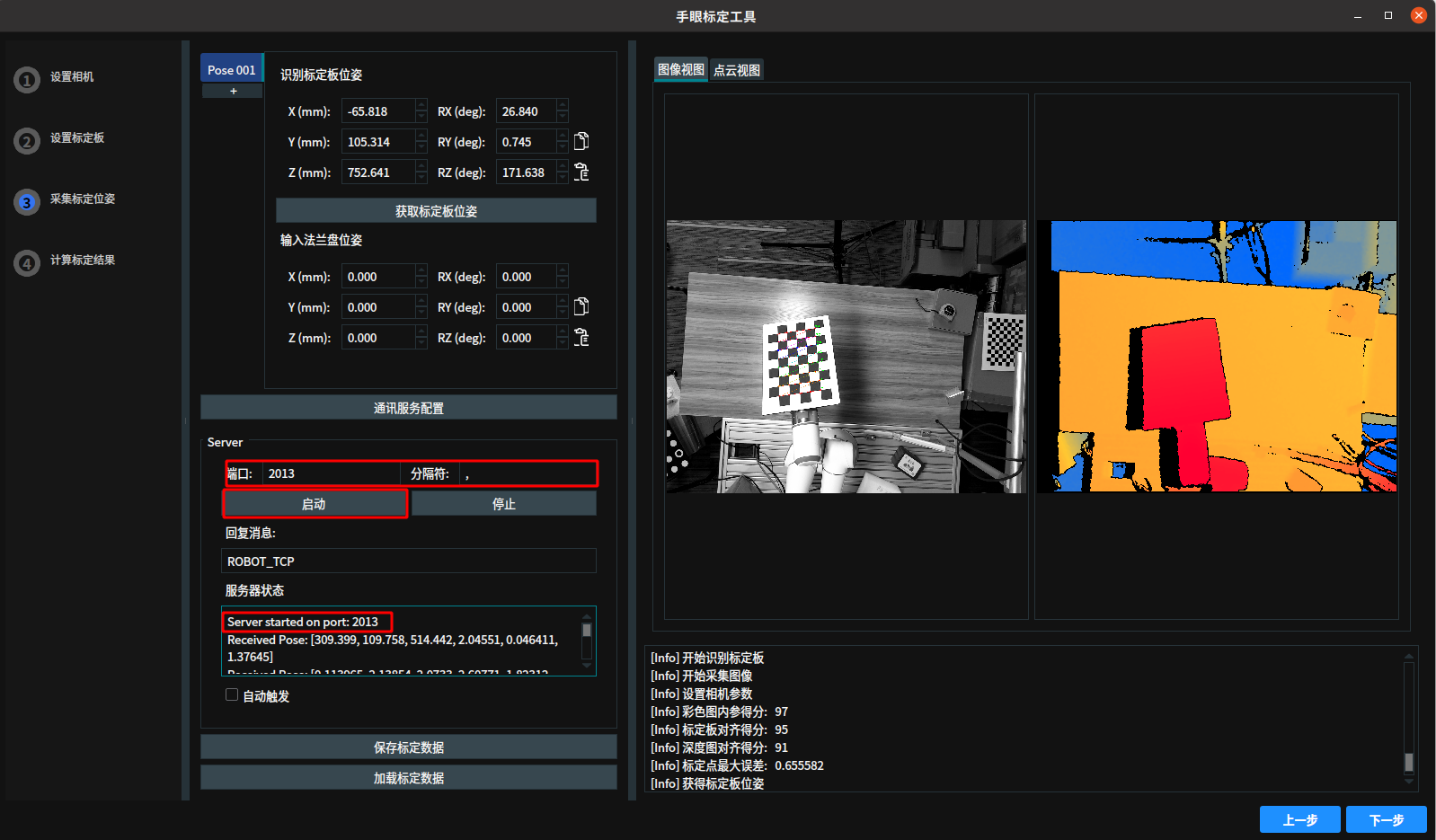
-
控制机器人发送 ROBOT_TCP 给 RVS(需要机器人工程师协助)。RVS 接收后,在
输入法兰盘位姿中显示当前法兰盘位姿。RVS 接收的法兰盘位姿单位为毫米和角度。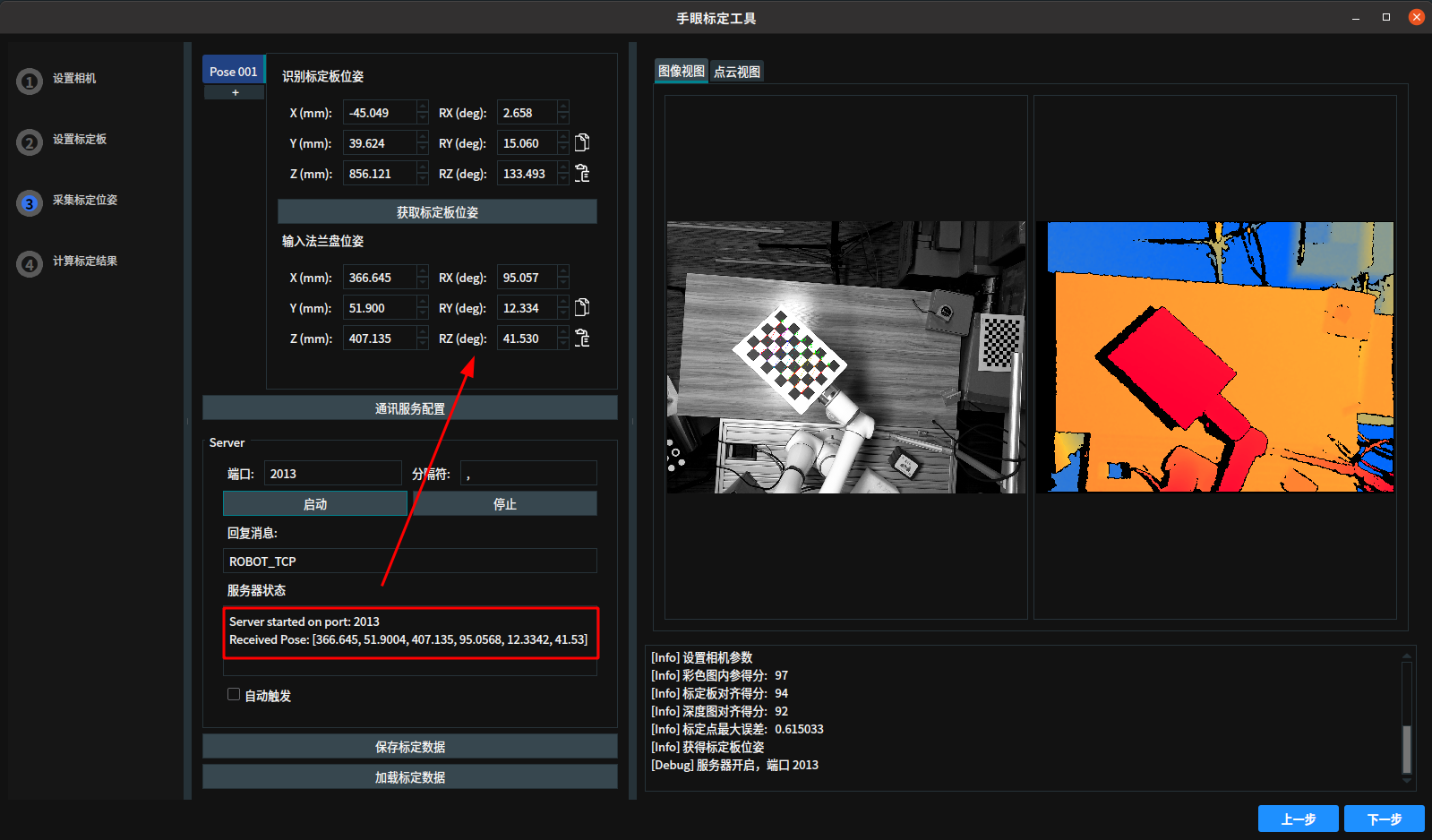
-
点击
+以保存下一组标定数据,或者点击自动触发以自动切换到下一组。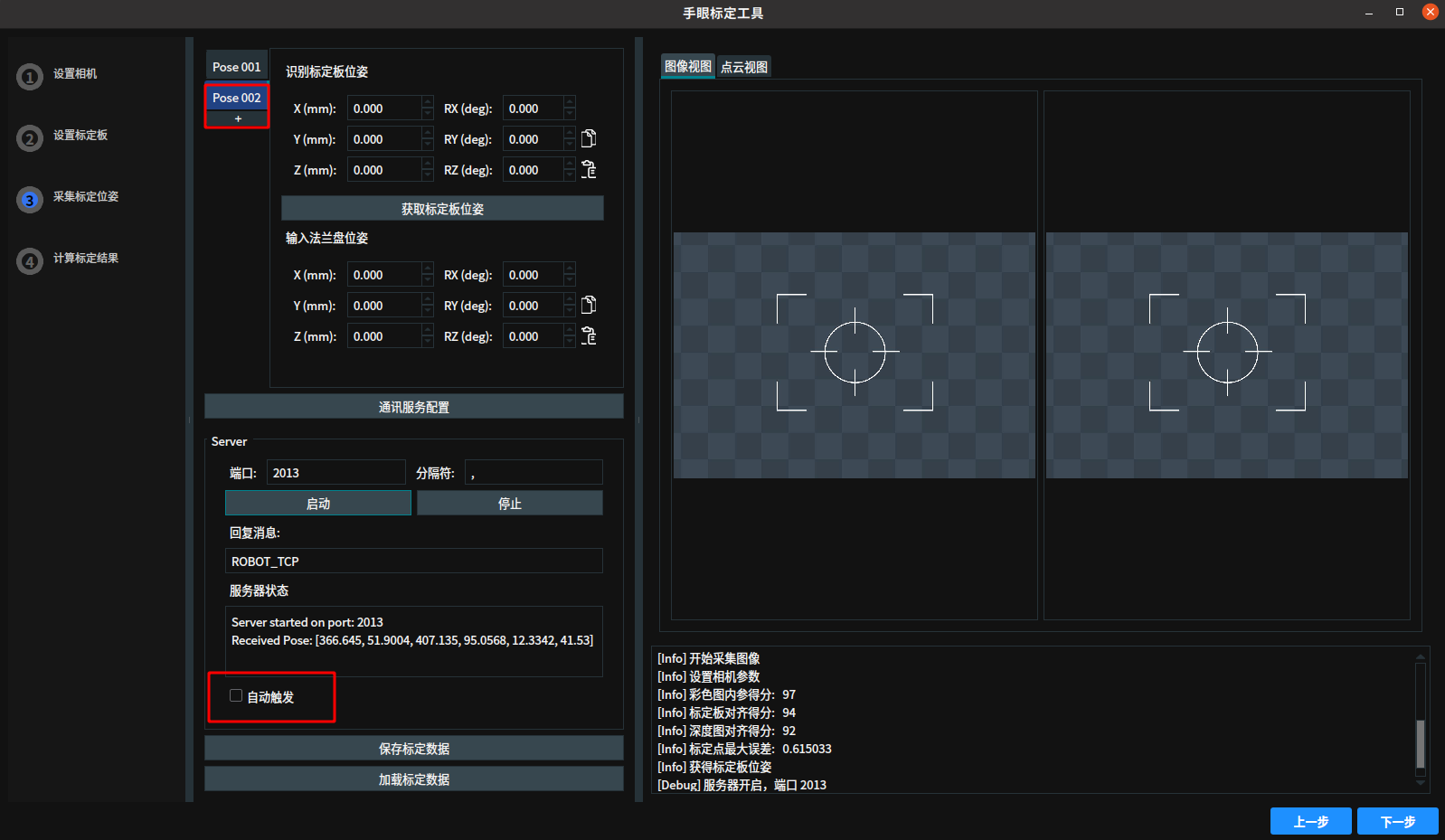
-
在相机的视野范围内移动棋盘格,以确保不同位置和角度的覆盖。重复
获取标定板位姿和获取机器人法兰盘位姿步骤,采集 18 至 25 组标定数据。若数据有误,可右击Pose XXX进行删除。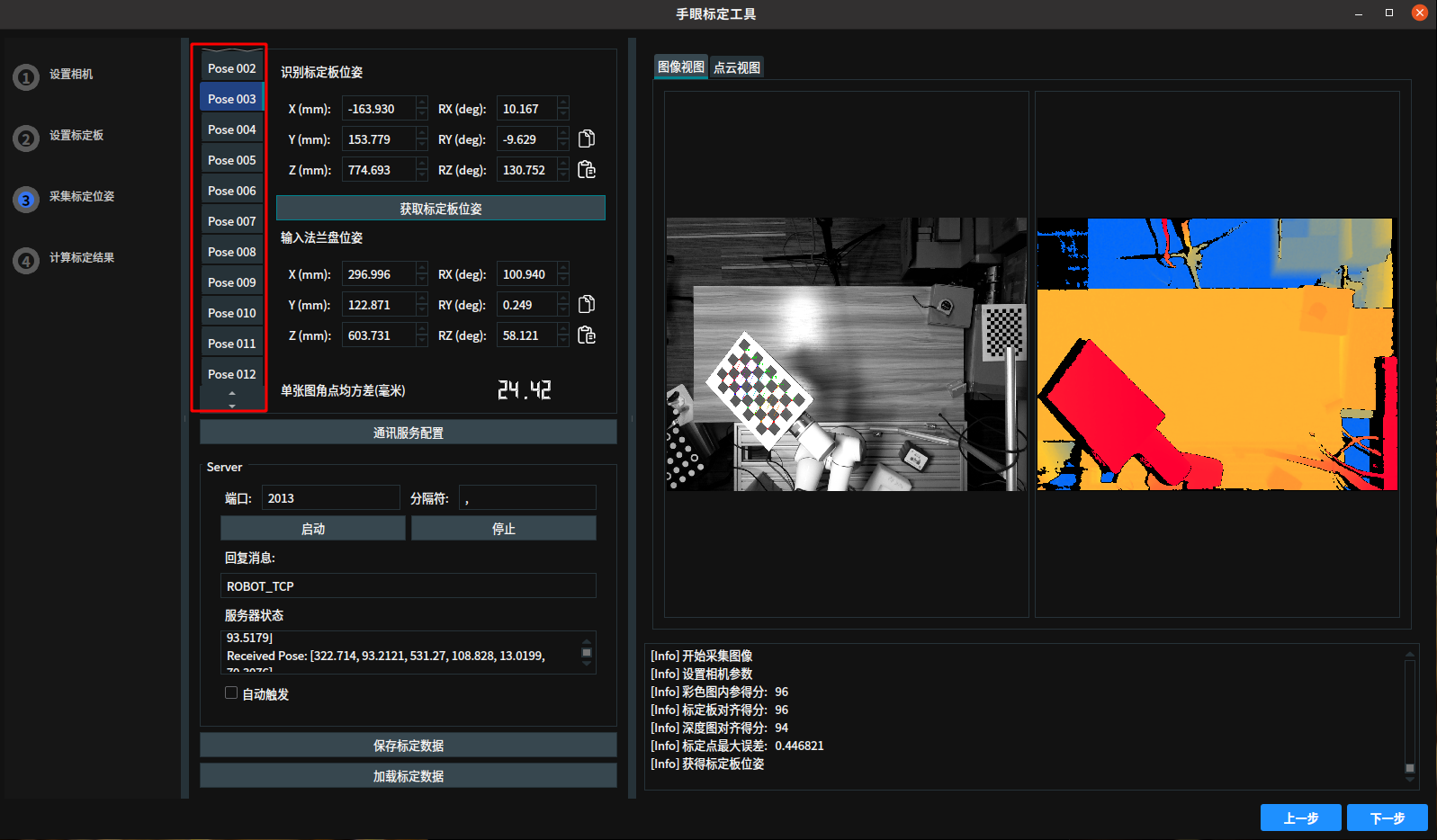
-
点击
保存标定数据可以将标定数据保存到指定的文件夹。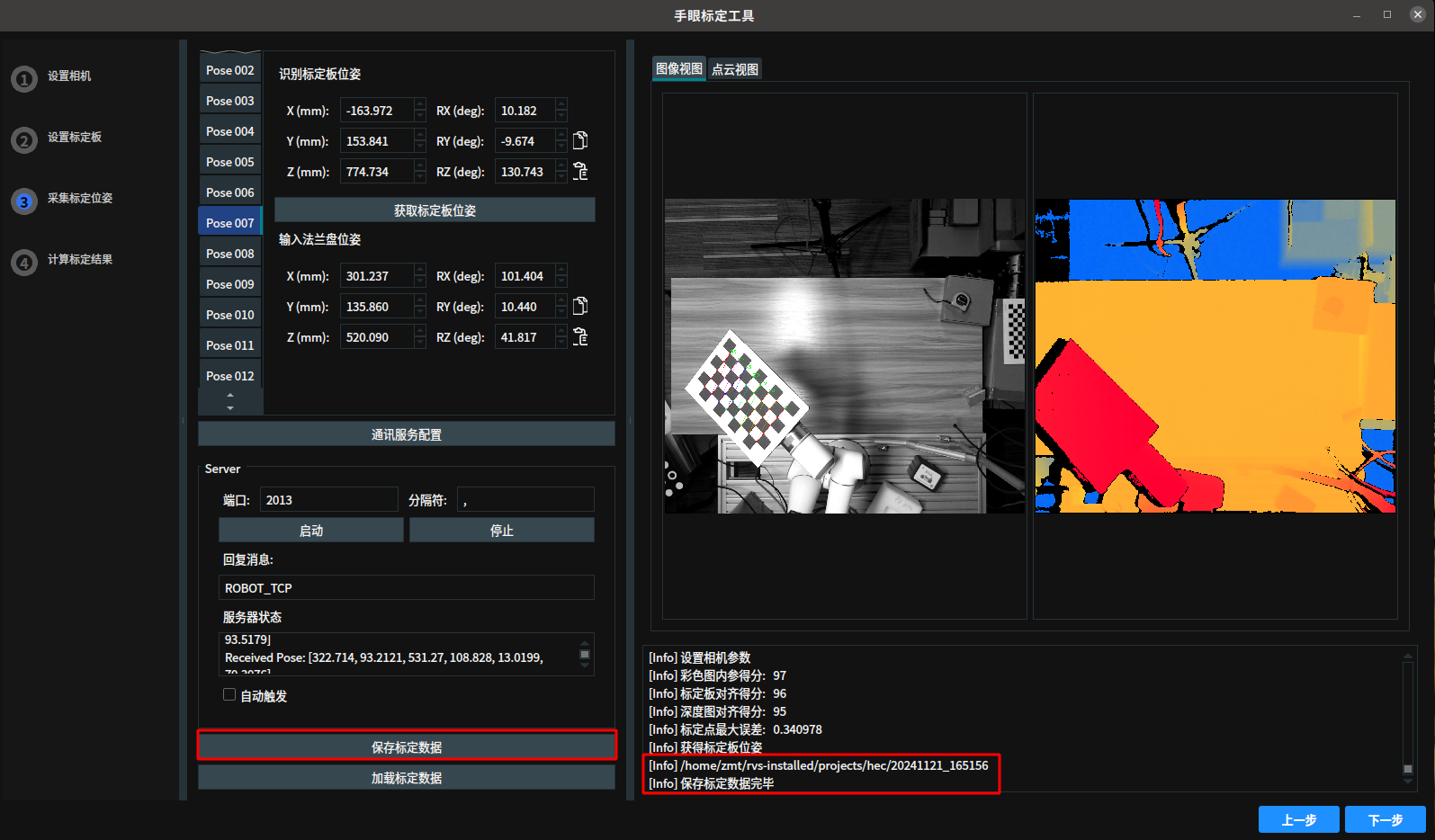
计算标定结果
-
点击
下一步进入计算标定结果界面,点击计算标定结果进行标定计算。计算完成后,将显示标定全角点均方差。标定结果可以通过点击复制按钮进行后续使用。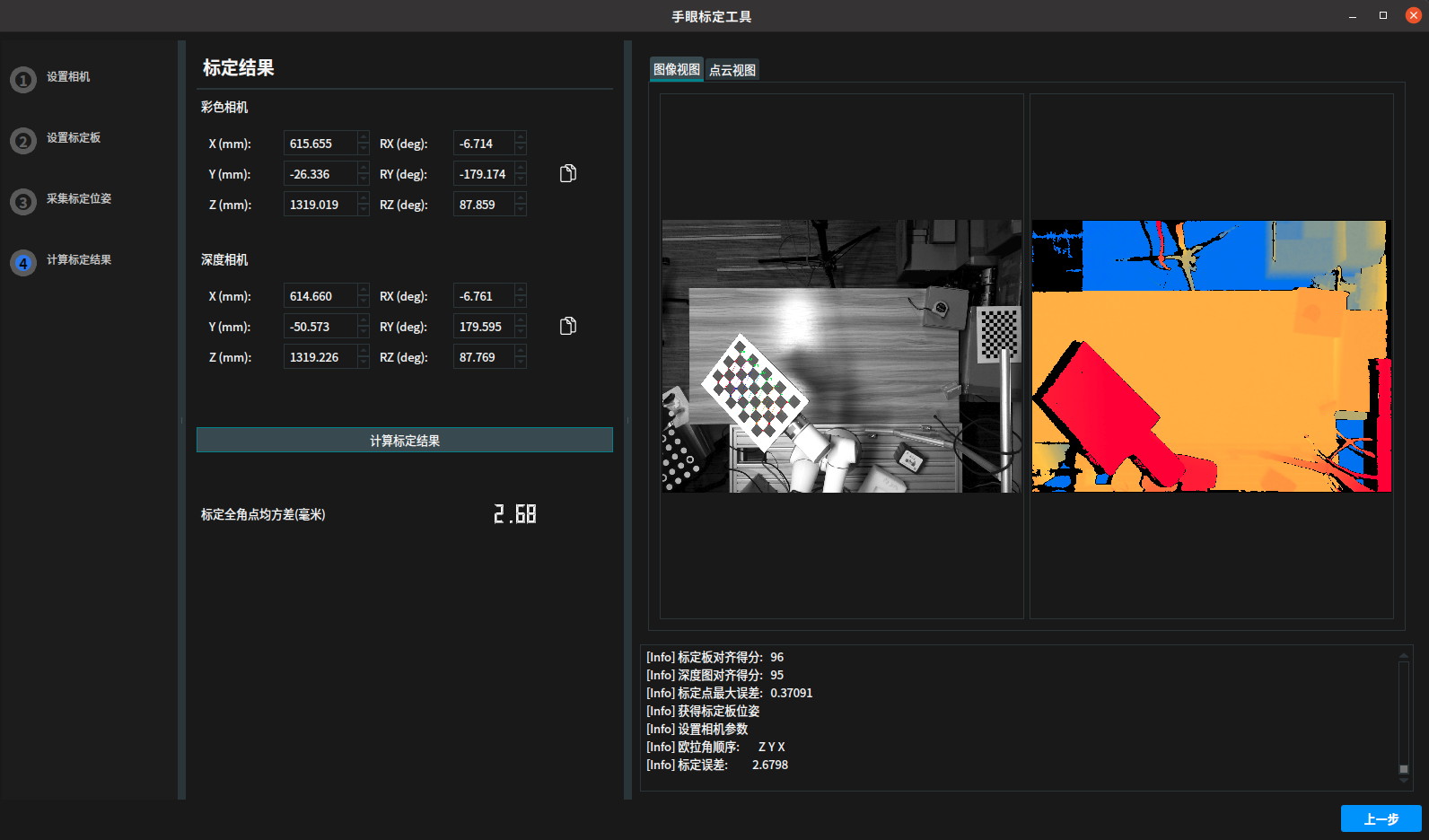
图漾圆环标定板手眼标定
在进行手眼标定时,使用图漾圆环标定板与棋盘格的流程基本一致。以下是图漾圆环标定板标定流程的简要说明,具体标定流程请参考棋盘格手眼标定:
-
相机参数:设置相应的相机参数与标定参数,以确保 RVS 能够正确识别标定板。
-
标定板参数:根据需求选择合适的标定板尺寸(如RCCB-28、RCCB-54等)。
-
采集标定位姿:在相机视野范围内移动标定板,确保覆盖不同位置和角度。获取标定板和机器人法兰盘的位姿,采集18至25组数据。
-
数据验证:检查标定数据的有效性,确保彩色图内参得分、标定对齐得分和深度图对齐得分均在90以上。
-
计算标定结果:使用采集的数据进行手眼标定计算。
确保在整个过程中保持标定板的稳定性,以提高标定结果的可靠性。
手眼标定误差分析
不同机器人配合不同的相机类型会有不同的精度表现,如果标定结果不太理想,可参考下述几个部分进行检查。
硬件问题
-
标定板参数填写不准确。
-
相机分辨率与标定参数的分辨率不一致。
-
标定板有污损。
-
标定板拍摄角点不清晰,不可以过曝或过暗。
-
机器人本身的精度误差较大。
数据问题
-
保存数据错乱,即拍照位和保存的 TCP 不对应。
-
数据单位未与 RVS 同步。
-
机器人欧拉角旋转顺序与标定结果的欧拉角顺序不一致。
操作问题
-
机器人位姿改变过小。
-
改变机器人位姿后,机械臂未稳定就进行数据采集。