CreateMatchModel 创建匹配点云模型
CreateMatchModel 算子拥有算子面板,可以利用其算子面板生成模板匹配所需的点云模板。
算子面板
右击算子,在算子菜单栏中选择算子面板,打开创建模板点云面板。
加载点云:点击后在面板中加载点云。立方体裁剪:点击后进行立方体裁剪。模板中心移至原点:点击后将模板中心移动至原点 :参数表格面板,用于调整搜索半径、最小邻居数等参数。
:参数表格面板,用于调整搜索半径、最小邻居数等参数。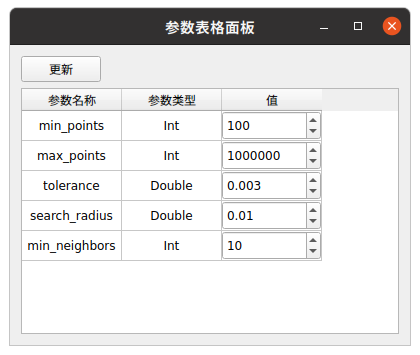
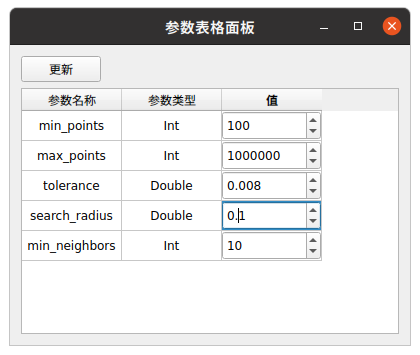
min_points:设置每一个点云类别的点云最小数量。max_points:设置每一个点云类别的点云最大数量。tolorance:设置点云中两个目标点的最小距离。search_radius:以点云中的点为圆心设置半径。默认值:0.1 。单位:m。min_neighbors:点半径范围内最少的邻近点。当小于该值时,剔除该点。
 :应用。应用每一步操作。
:应用。应用每一步操作。 :重置。
:重置。 :设置立方体在创建模板点云面板中的可视化属性。
:设置立方体在创建模板点云面板中的可视化属性。X/Y/Z/RX/RY/RZ/Width/Height/Depth:设置立方体的中心点位位姿和立方体的长宽高。 :进入第二步。
:进入第二步。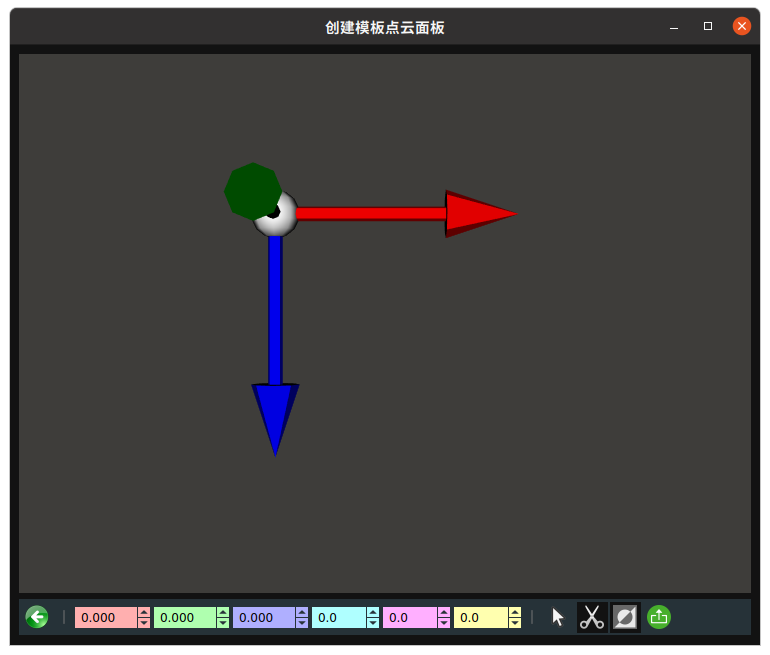
 :返回第一步。
:返回第一步。X/Y/Z/RX/RY/RZ:微调模板点云中心位姿。 :点击此按钮以切换到框选模式。在框选模式下,可以通过拖动鼠标来选择需要裁剪的目标点云。
:点击此按钮以切换到框选模式。在框选模式下,可以通过拖动鼠标来选择需要裁剪的目标点云。 :点击此按钮以裁剪选中的点云。
:点击此按钮以裁剪选中的点云。 :点击此按钮以反选当前选中的点云部分。
:点击此按钮以反选当前选中的点云部分。 :导出模板点云。
:导出模板点云。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:模板点云
功能演示
CreateMatchModel 算子生成模板匹配所需的点云模板。
步骤1:算子准备
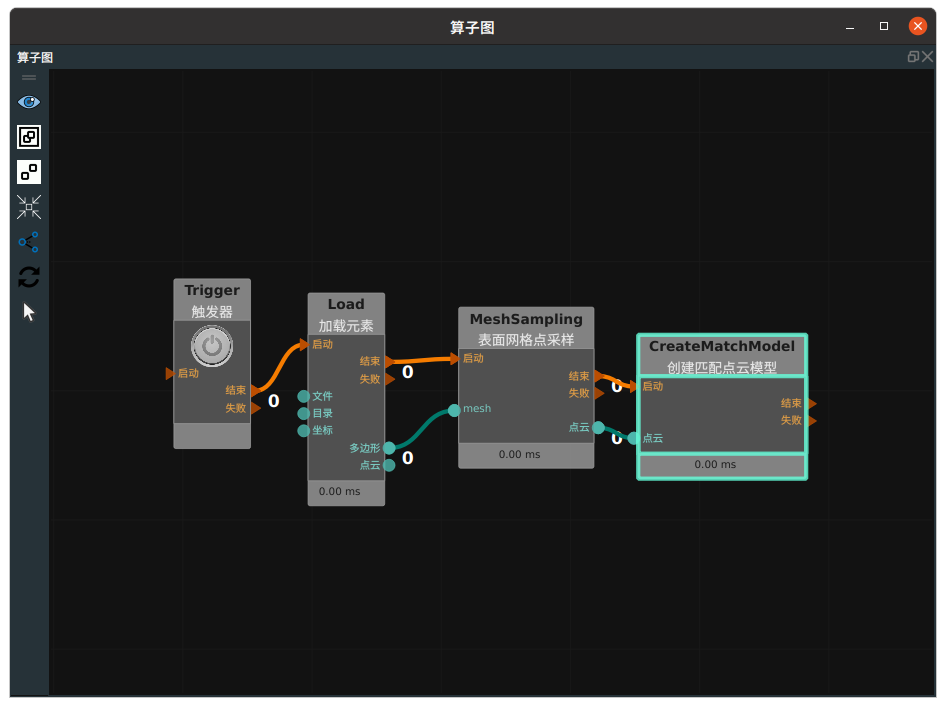
添加 Trigger、Load、MeshSampling、CreateMatchModel 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → PolyData
文件 →
 → 选择多边形文件名 ( example_data/obj/workpiece.obj )
→ 选择多边形文件名 ( example_data/obj/workpiece.obj )多边形 →
可视化
设置 MeshSampling 算子参数:
leaf_size→ 0.001
sample_points → 1000
点云 →
可视化
步骤3:连接算子
步骤4:运行
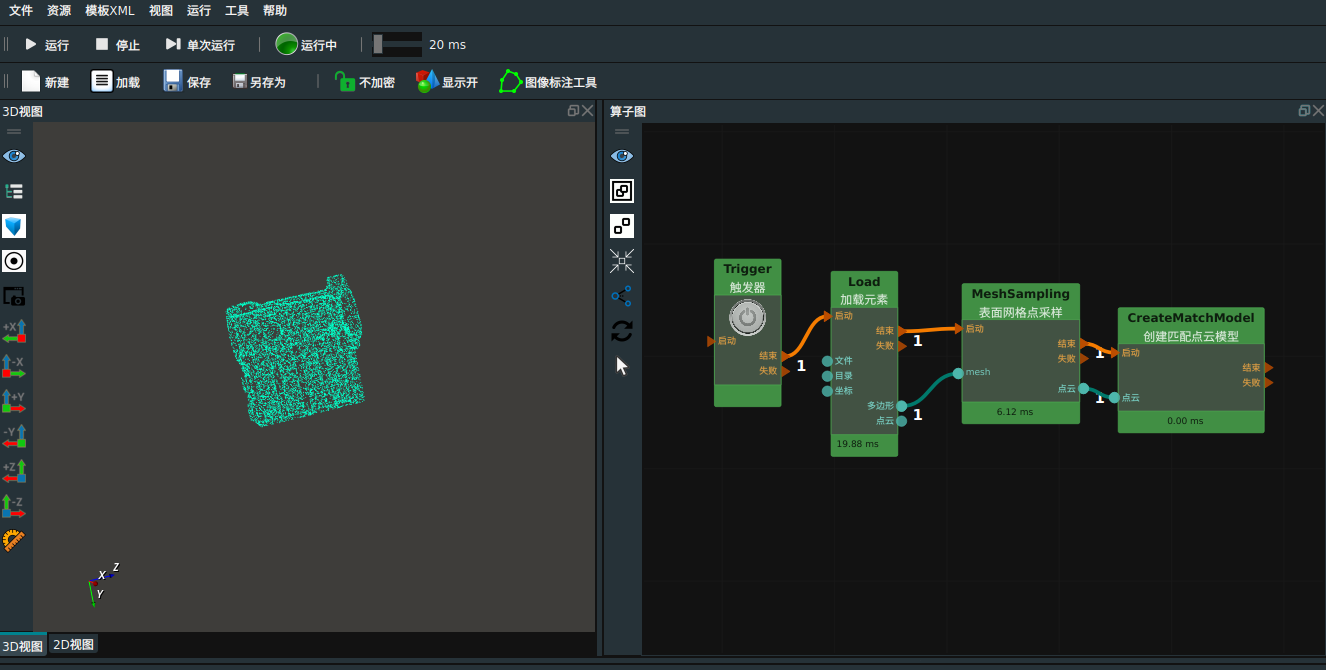
点击 RVS 的运行按钮,触发 Trigger 算子。
运行结果
如下图所示,3D 视图中显示MeshSampling 点云结果。
创建模板点云面板
选中 CreateMatchModel 算子,右击打开算子菜单栏,选择
算子面板打开创建模板点云面板。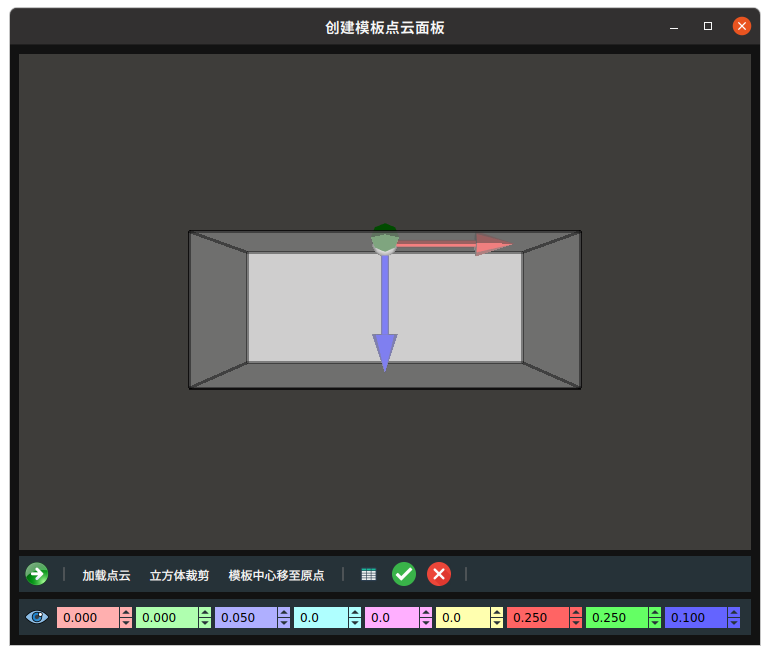
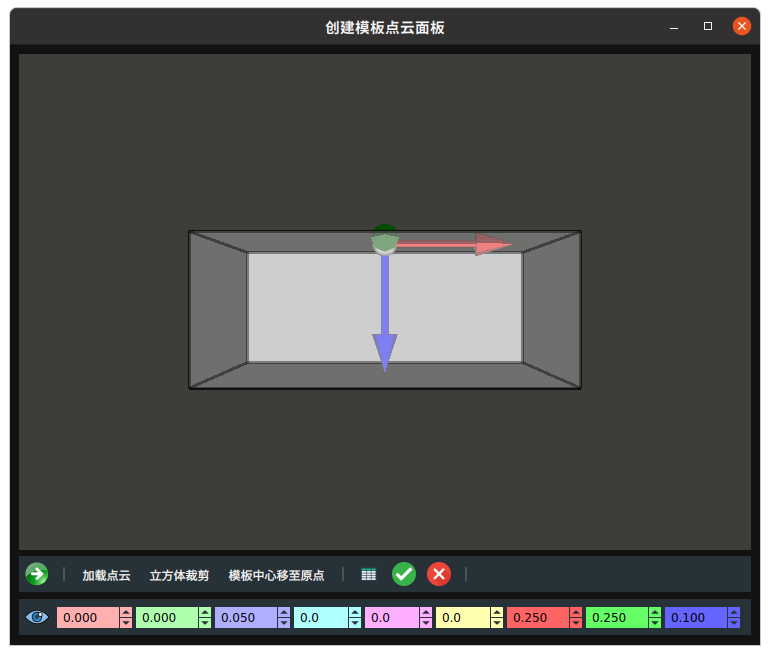
点击
加载点云,在面板中加载点云。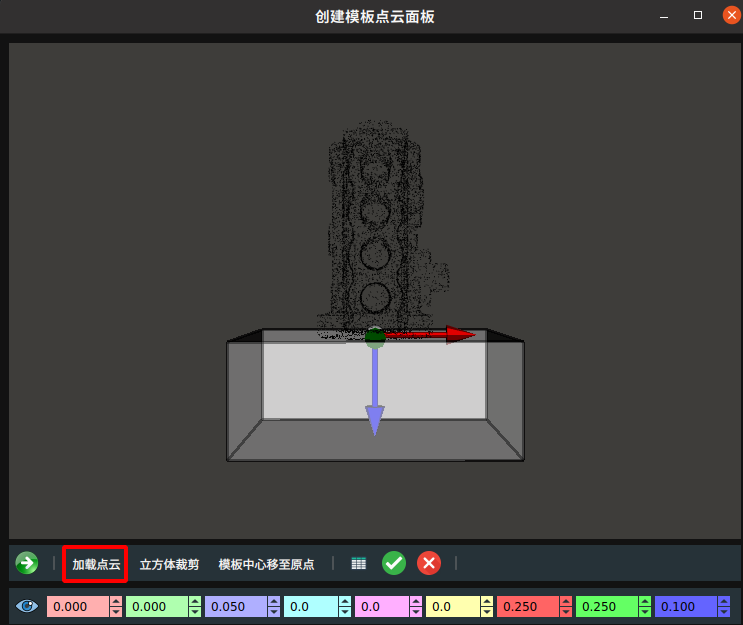
调整立方体参数使立方体框选出模板区域。
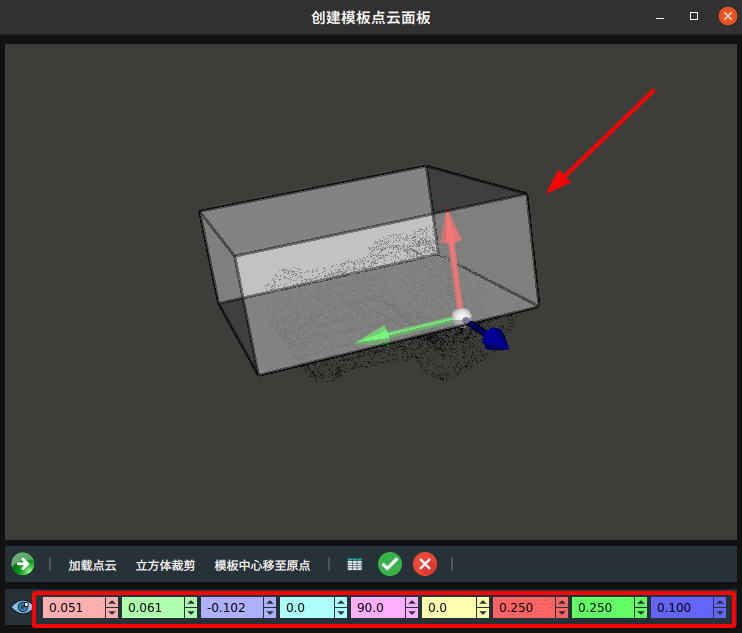
点击
立方体裁剪,点击勾选设置。此时已完成点云模板切割。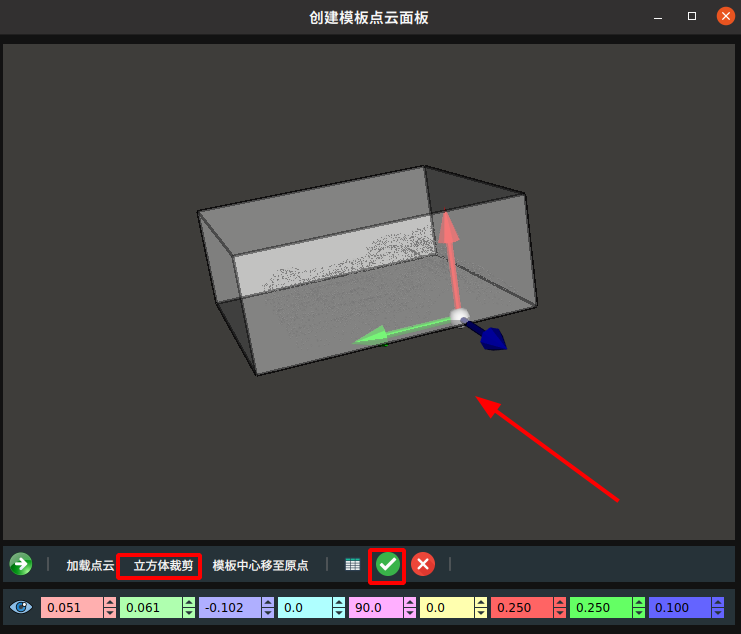
点击
打开参数表格面板调整参数:tolerance → 0.008
search_radius → 0.1
点击
模板中心移至原点将模板中心移动至原点。点击保存操作。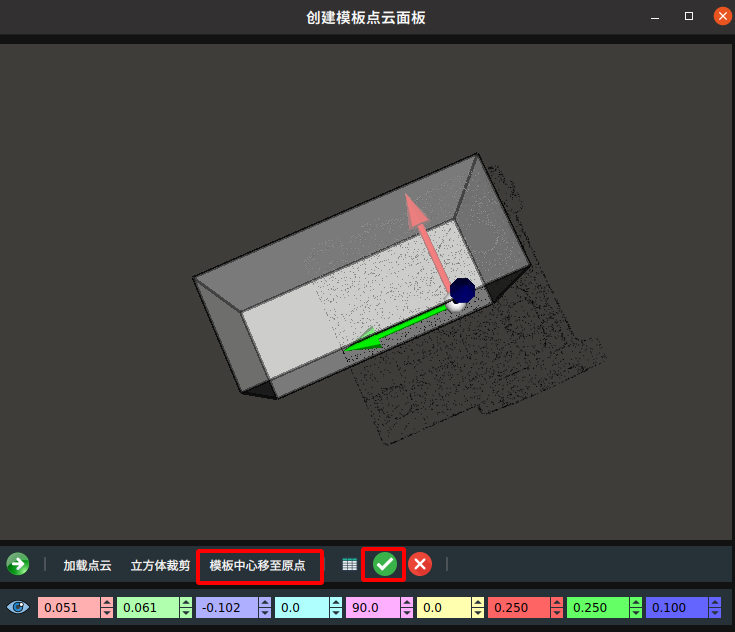
点击
进入下一步,在此步骤中可以调整模板中心点位姿,调整点云区域,并进行手动裁剪和取反等操作。调整完成后,点击,将模板导出。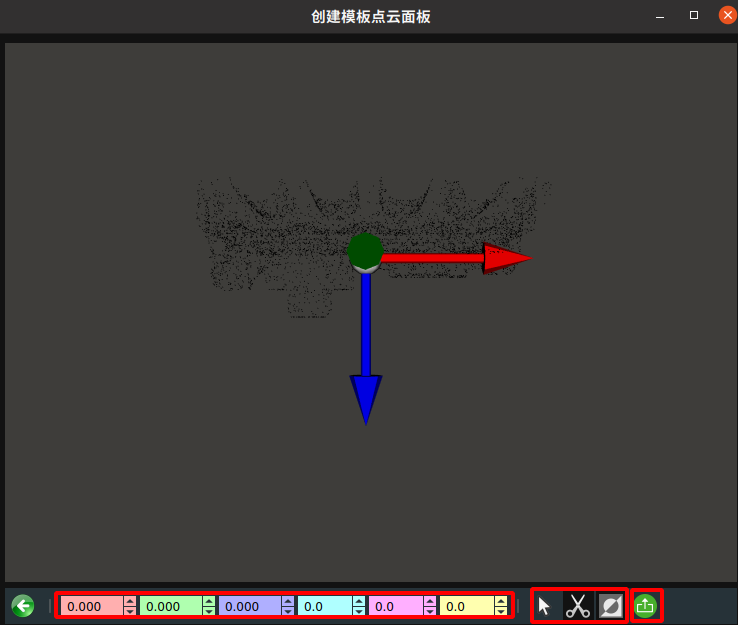
设置模板点云名称。
模板点云保存在 runtime 目录下。