PolyDataCloudRenderer 多边形渲染点云
PolyDataCloudRenderer 算子用于渲染多边形点云。将多边形数据以点云形式呈现出来,通过调整相机位置和方向,可以改变点云在渲染结果中的呈现方式,从而实现不同的视角和观察效果。
算子参数
相机视场宽度/camera_width:设置相机视野中水平方向范围。默认值:848。相机视场高度/camera_height:设置相机视野中垂直方向的范围。默认值:480。相机视角/camera_angle:设置相机拍摄或观察场景时的视野角度。默认值:42.625。相机坐标/camera_pose:设置相机拍摄场景的位置。点云/cloud:设置点云在 3D 视图中的可视化属性。 打开点云可视化。
打开点云可视化。 关闭点云可视化。
关闭点云可视化。 设置点云的颜色。取值范围:[-2,360] 。默认值:-2 。
设置点云的颜色。取值范围:[-2,360] 。默认值:-2 。 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
相机信息/camera_info:设置相机信息在 3D 视图中的可视化属性。- 打开相机信息可视化。
- 关闭相机信息可视化。
相机信息比例/camera_info_sacle:设置相机信息在3D 视图中的比例显示。默认值:0.1。
数据信号输入输出
输入:
polydata:数据类型:PolyData
输入内容:多边形
polydata_list:数据类型:PolyDataList
输入内容:多边形列表
camera_pose:数据类型:Pose
输入内容:相机坐标
camera_info:数据类型:CameraInfo
输入内容:相机信息
输出:
cloud:数据类型:PointCloud
输出内容:点云
camera_info:数据类型:CameraInfo
输出内容:相机信息
功能演示
PolyDataCloudRenderer 算子将加载的多边形数据以点云形式呈现出来。
步骤1:算子准备
添加 Trigger、Load、PolyDataCloudRenderer 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → PolyData
文件 →
 → 选择多边形文件名 ( example_data/obj/workpiece.obj )
→ 选择多边形文件名 ( example_data/obj/workpiece.obj )多边形 →
可视化
设置PolyDataCloudRenderer算子参数:
相机坐标 → -0.1 0 -0.5 0 0 0
点云 →
可视化相机信息 →
可视化
步骤3:连接算子
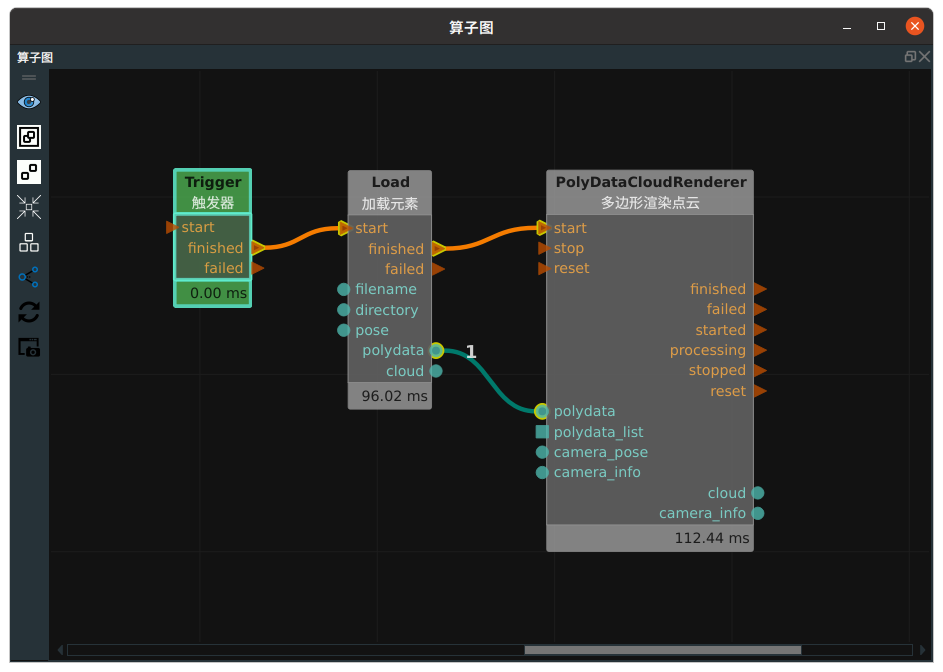
步骤4:运行
点击 RVS 的运行按钮,触发 Trigger 算子。
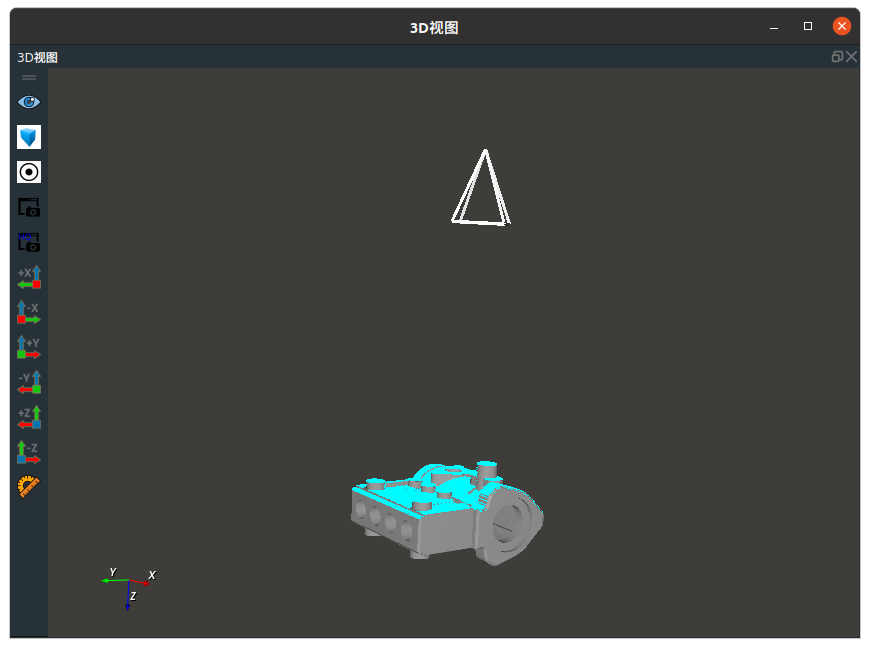
运行结果
如下图所示,2D 视图中显示 Load 算子和 PolyDataCloudRenderer 算子的结果。此图中蓝色部分为渲染后的点云。