RVS 1.7 版本重磅来袭,多个功能全面升级!
1. RVS 将 Pose 的 Roll、Pitch、Yaw 统一改为 RX、RY、RZ
此更改不兼容 1.6 版本的 XML 文件。您可以下载 Python 二次开发脚本来更新 XML 文件:Python 二次开发更新 XML 文件。

2. RVS 的算子中有关长度和角度的参数可以跟随系统调整单位
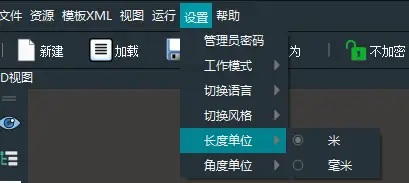
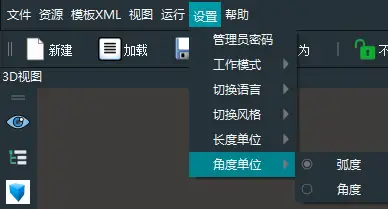
目前支持长度(米、毫米)和角度(弧度、角度)之间的切换。
长度单位切换:设置->长度单位->米/毫米
角度单位切换:设置->角度单位->弧度/角度
3. RVS的避撞模块 MotionPlanning 已重构
使用 SceneResource 算子替换了之前的 MotionPlanningResource 算子,提供了更加简便的避撞调试方法。
新增
ChangeRobotTool算子,可直接切换机器人末端工具。
在
SceneResource资源算子中新增了启用避撞参数,可动态切换避撞功能的启用状态。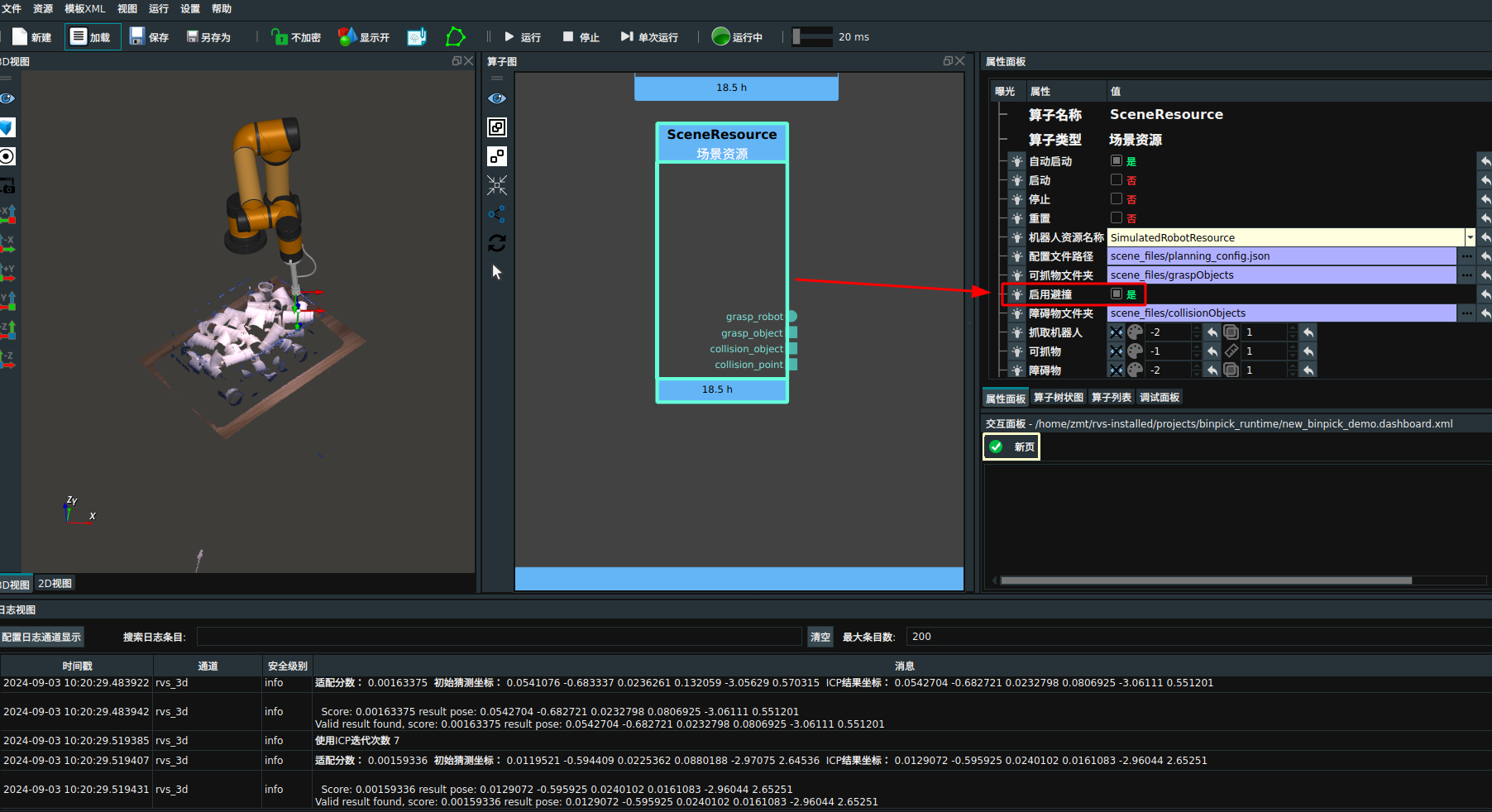
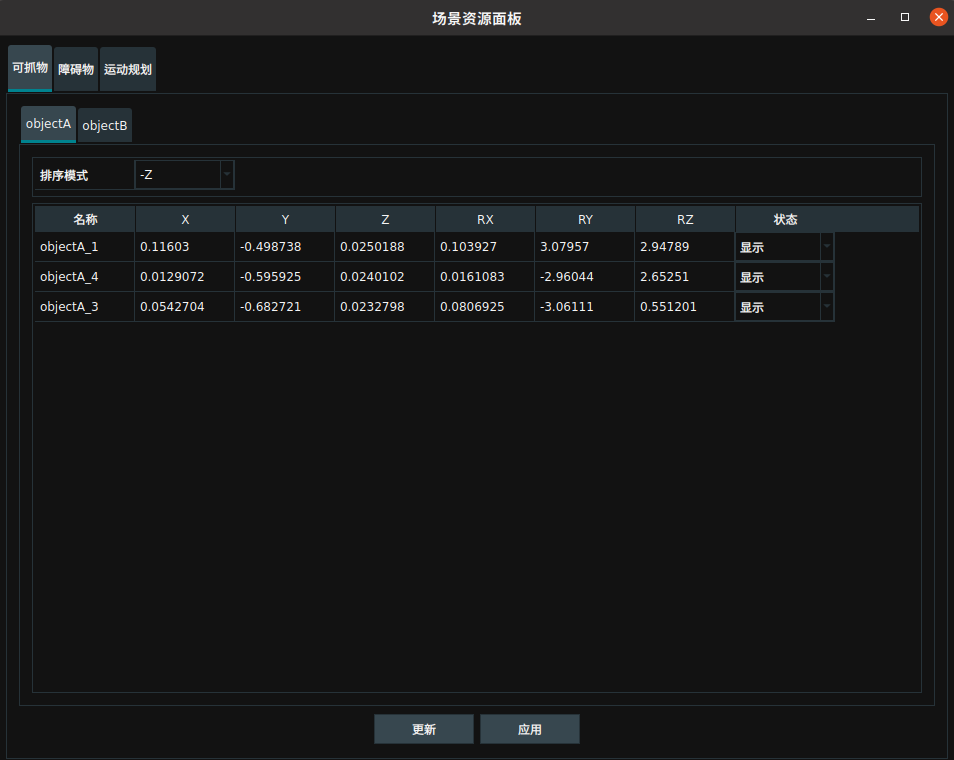
SceneResource资源算子包含场景资源面板,用于对可抓物、障碍物、运动规划进行调试操作。可抓物:对场景中的可抓取物体进行管理。用户可以设置显示、隐藏可抓物体。
障碍物:对场景中的障碍物体进行管理。用户可以设置显示、隐藏障碍物。
运动规划:对场景中的运动路径和规划进行调试。用户可以设置和调整运动路径,确保机器人能够按照预期的路径进行移动,避免碰撞和其他问题。
4. 新增制作点云模板工具
制作点云模板工具替换了之前 CreateMatchModel 的所有功能。CreateMatchModel目前不再提供算子面板,主要提供圆柱,环形,球形点云模板的动态生成。此外,制作点云模板工具还提供了制作 3D凸 包工具,用于简化机器人夹具模型,以便导入 RVS 的避撞系统。
点云修改界面
用于点云模板的制作,包含以下操作:
导入:导入点云数据,开始模板制作。
点云切割:对点云数据进行裁剪,保留所需部分。
反选:选择点云中的非目标部分进行操作。
参数调整:调整模板点云的聚类、半径异常值删除参数,以满足具体需求。
点云模板移至原点:将点云模板移动到坐标系的原点位置,便于后续处理和使用。
导出:将制作好的点云模板导出为指定格式的文件,便于存储和分享。

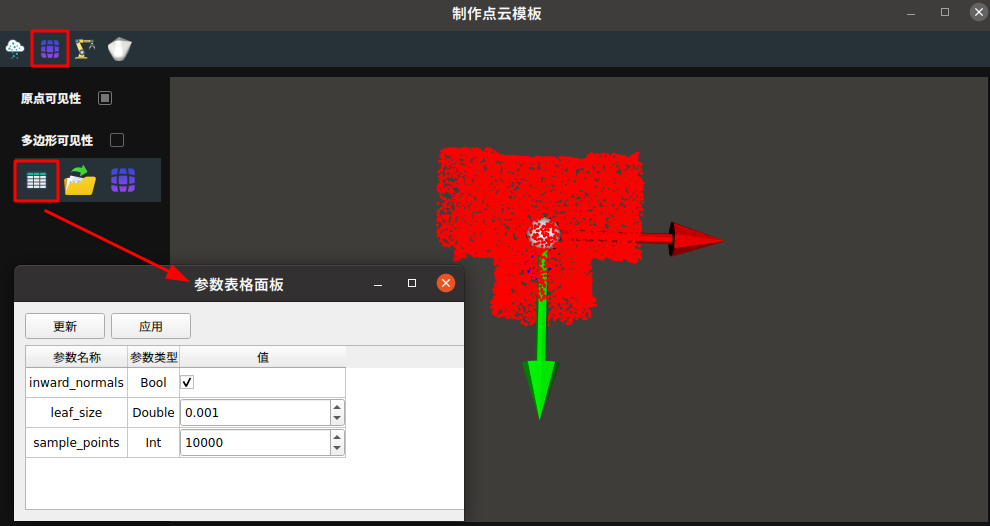
网格采样界面
网格采样界面用于对 PolyData 数据形式的 3D 目标表面网格进行采样,输出该 3D 目标的表面点云。
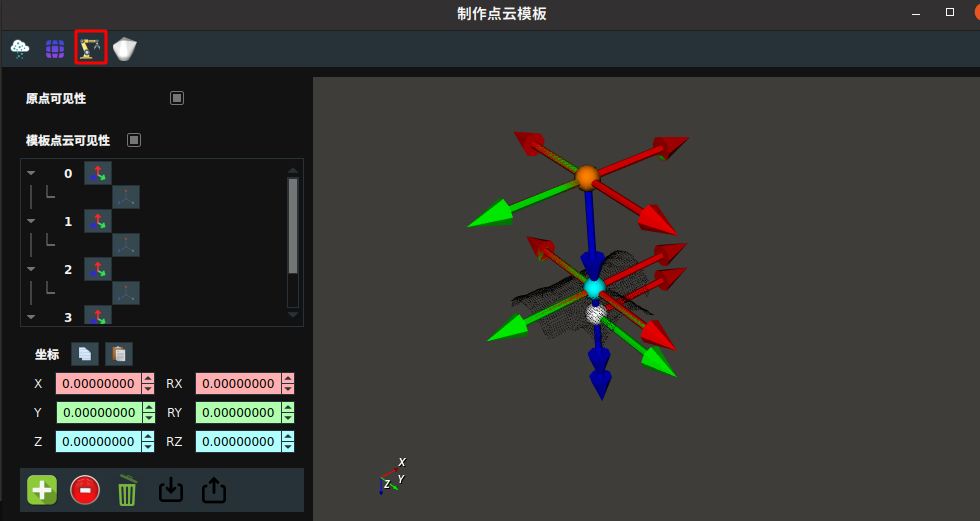
添加抓取坐标界面
添加抓取坐标界面用于设置和调整机器人抓取位和预抓位,支持导入导出操作。
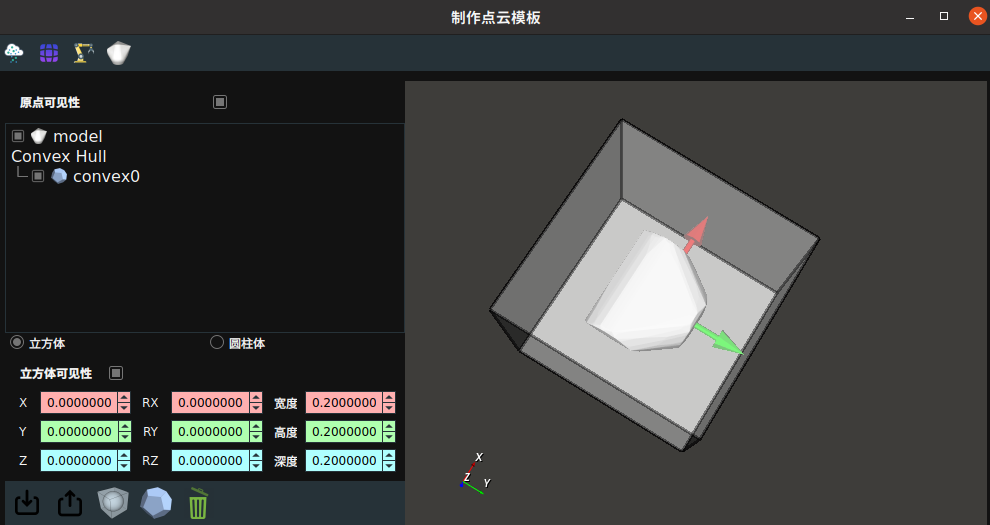
模型简化界面
简化模型界面用于生成物体的凸包和包围盒。
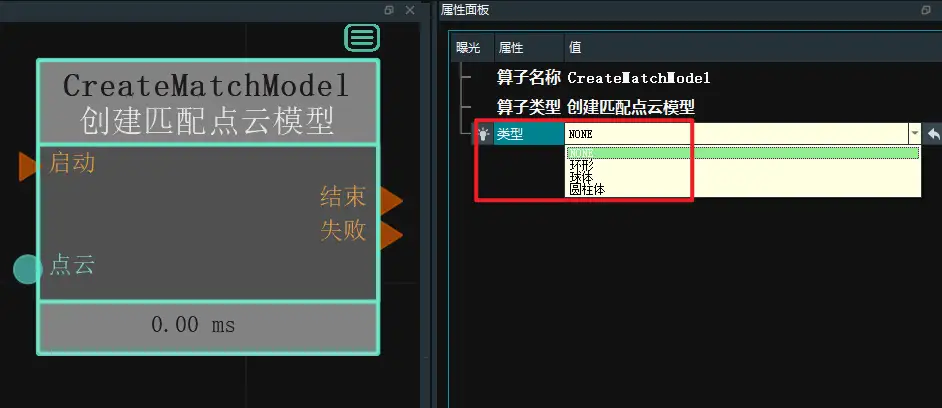
CreateMatchModel 算子
CreateMatchModel 支持生成环形、圆柱和球体的点云模板。
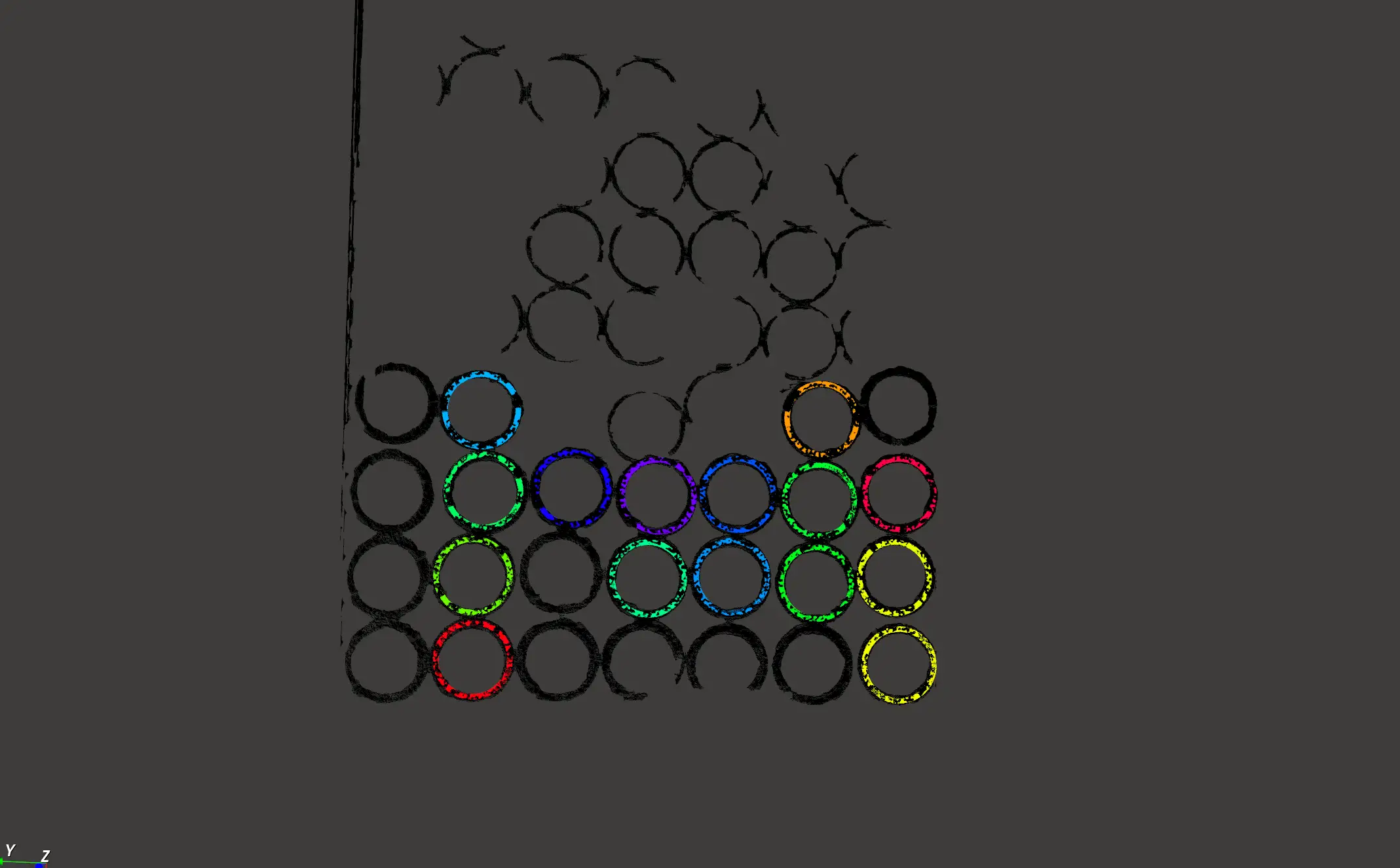
环形模板匹配案例
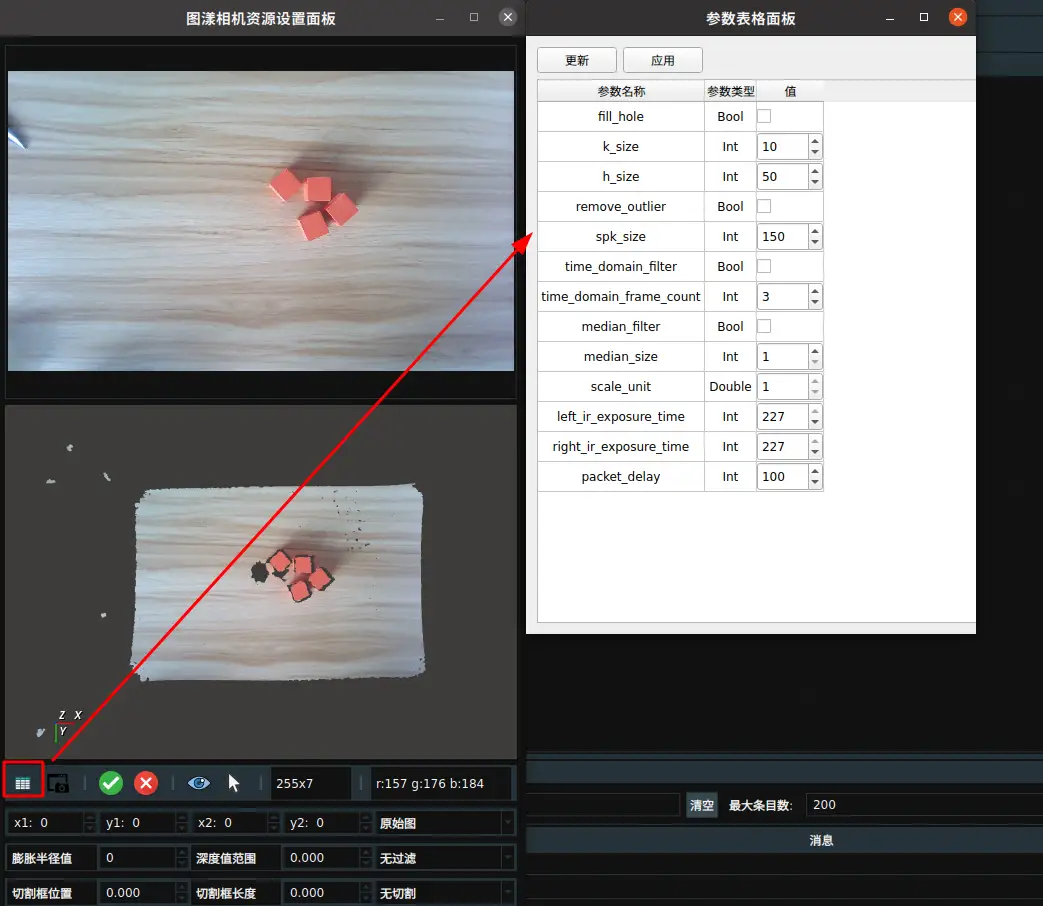
5. TyCameraResource 资源算子属性面板调整
将图漾相机参数调整至图漾相机资源设置面板。
添加了对深度图“空洞”、“噪点”以及“时域滤波器”的相关功能设置。
打开方式
右击图漾相机资源算子,选择“算子面板”,然后点击“表格”图标按钮打开参数表格面板。
使用说明
在此处调整参数后保存,会将参数保存至 XML 文件。再次连接相机后,无需进行参数调整。
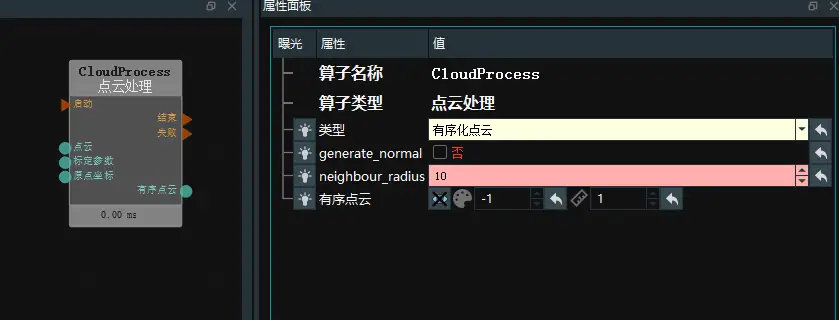
6. CloudProcess 算子添加了“有序化点云”功能
7. 添加了 Statistics 算子,提供统计坐标标准差的结果
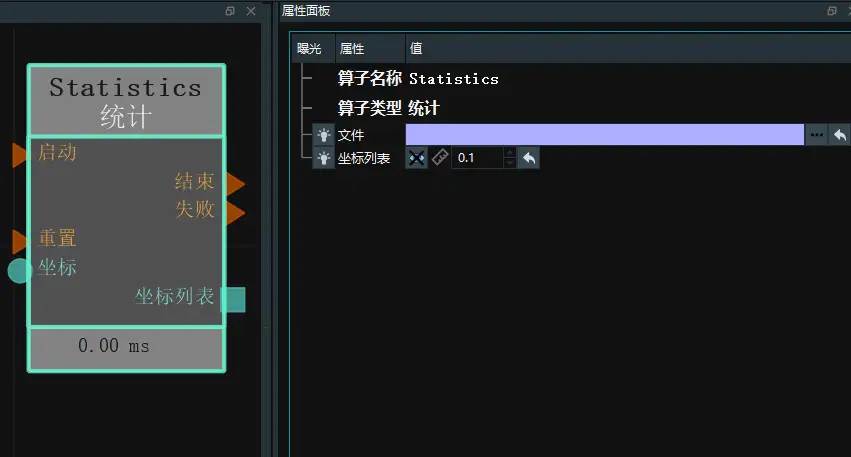
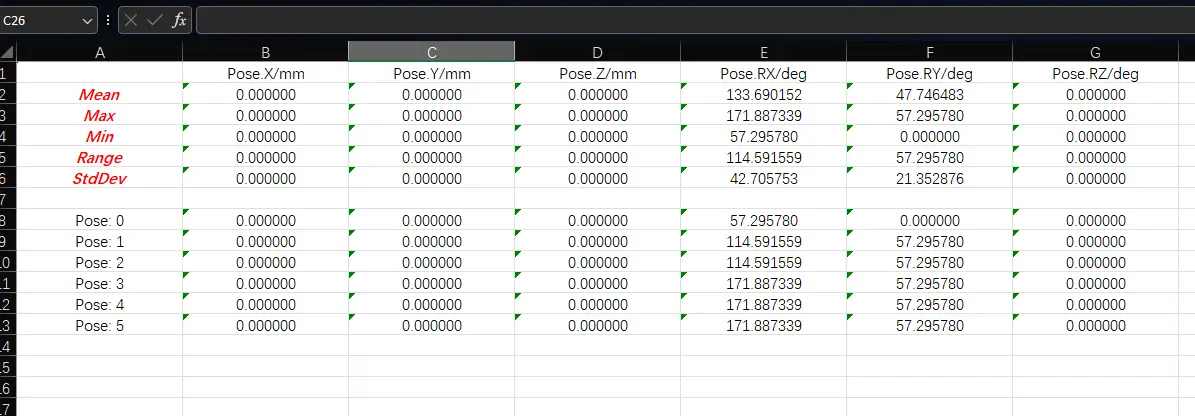
案例
输入多组坐标后,导出文件数据表,统计多组坐标的平均值、最大值、最小值、极差、标准差。内容显示如下:
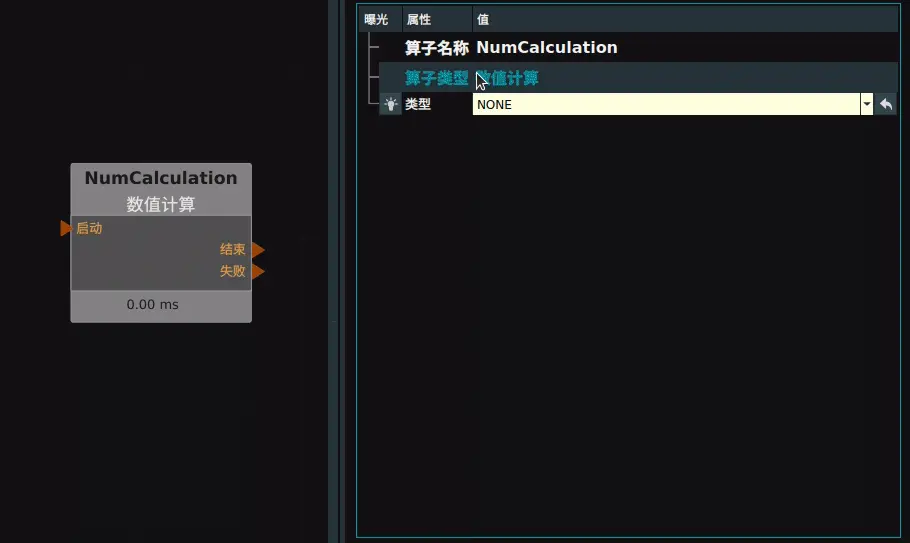
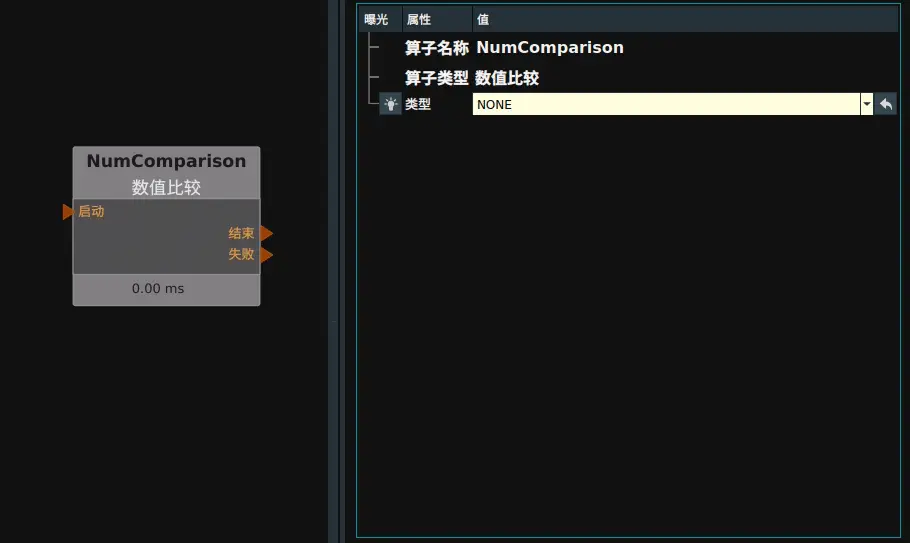
8.新增数值比较和数值计算算子
数值计算算子用于执行各种数值计算操作,包含以下功能:
加法
减法
乘法
除法
计算符号
向下取整
向上取整
四舍五入
倒数
数值比较算子用于执行数值比较操作,包含以下功能:
大于 (>)
大于等于 (>=)
小于 (<)
小于等于 (<=)
等于 (==)
不等于 (!=)
使用说明
当输入端口无输入时,使用属性面板中的属性值进行计算和比较。
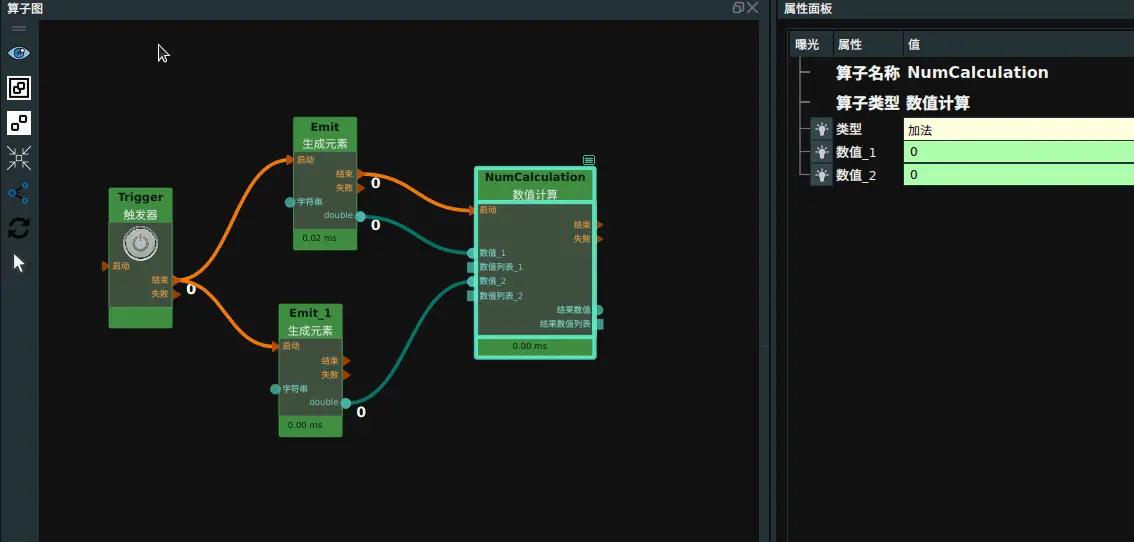
数值计算案例
使用数值计算算子将两个 double 数值相加。
首先,使用 Emit 算子生成两个 double 数值,分别为 10 和 11.2。
数值计算结果为21.2。
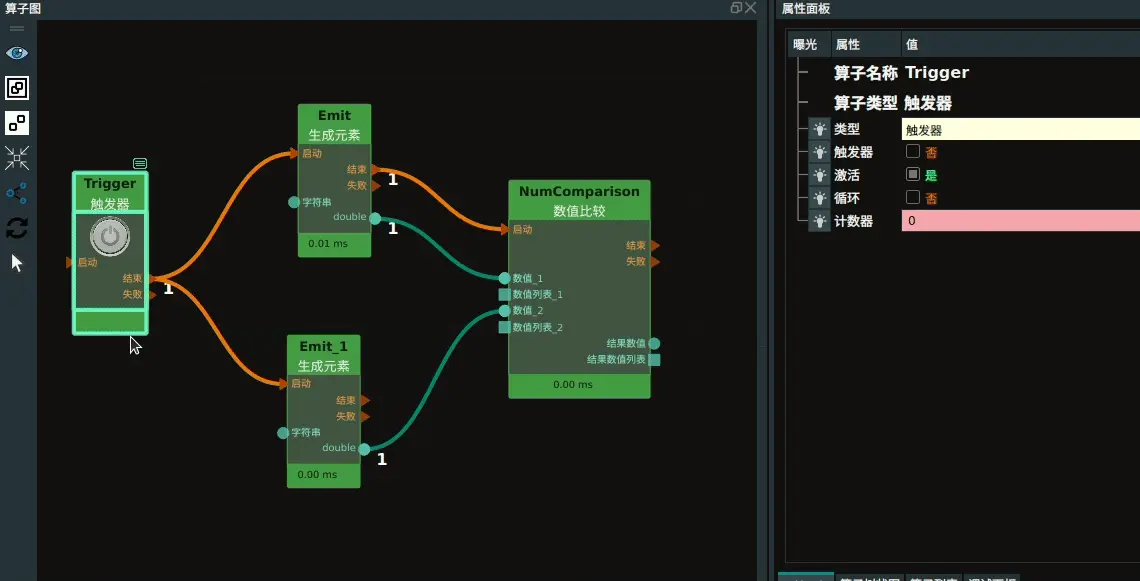
数值比较案例
使用数值计算算子将两个 double 数值进行比较(>)。
首先,使用 Emit 算子生成两个 double 数值,分别为 10 和 11.2。
比较结果为 0。
9.MinimumBoundingBox 提供了新模式,可以按照包围立方体的长宽高自动调整中心坐标XYZ轴朝向
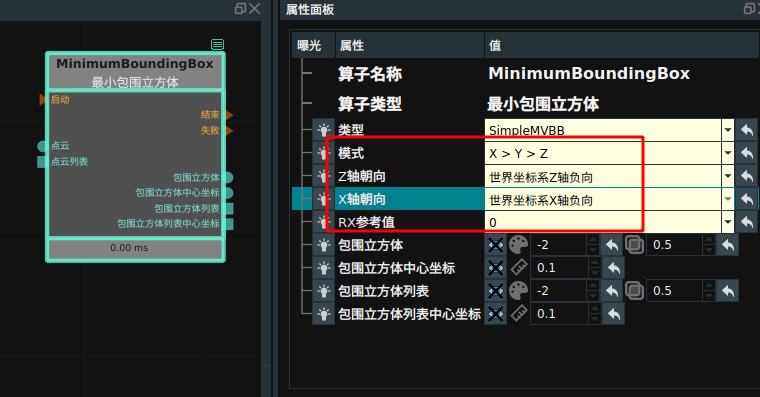
案例
将 MinimumBoundingBox 模式选择 X>Y>Z,Z轴朝向选择世界坐标系Z轴负向,结果显示如 3D 视图所示:

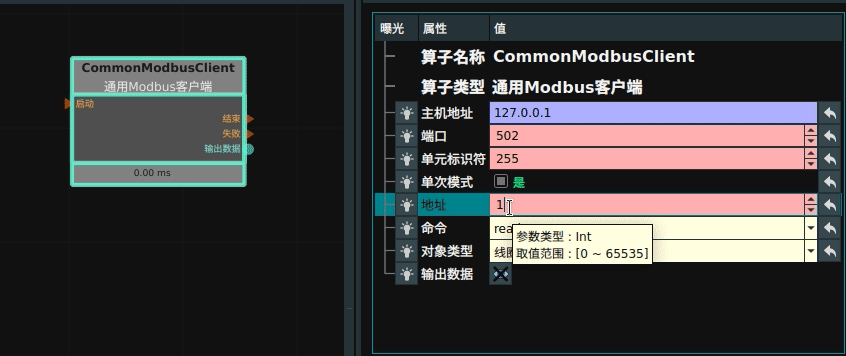
10. 修正 modbus 算子只能读取 0~255 的问题,现在支持读取 0~65535