CheckBoxPose 检查箱子坐标
CheckBoxPose 算子用于检查箱子坐标。
算子参数
类型/type:指定检查的类型。RemoveInvalidPose:移除无效的坐标。
立方体宽度/cube_width:检查区域的立方体宽度。立方体高度/cube_height:检查区域的立方体高度。立方体深度/cube_depth:检查区域的立方体深度。最小点数/min_points:有效坐标点的点云最小点数。坐标列表/pose_list:设置坐标列表在3D 视图中的可视化属性。 打开坐标列表可视化。
打开坐标列表可视化。 关闭坐标列表可视化。
关闭坐标列表可视化。 设置坐标列表的尺寸大小。取值范围:[0.001,10]。默认值:0.1 。
设置坐标列表的尺寸大小。取值范围:[0.001,10]。默认值:0.1 。
索引列表/index_list:设置索引列表的曝光属性。曝光后可以与交互面板中表格控件进行绑定。- 打开索引列表曝光属性。
- 关闭索引列表曝光属性。
数据信号输入输出
输入:
点云:数据类型:PointCloud
输入内容:箱子点云
坐标列表:数据类型:PoseList
输入内容:箱子点云中各箱子坐标
输出:
坐标列表:数据类型:PoseList
输出内容:符合要求的箱子坐标列表
索引列表:数据类型:StringList
输出内容:低于最小点数的索引列表
功能演示
使用 BoxSortGenerator 进行箱子坐标检查。
本案例只涉及 BoxSortGenerator 算子部分的演示,完整的 XML 与数据已上传至 example_data.zip 中的 BoxSortGenerator 文件夹。将文件夹内三项直接复制至 runtime 目录即可。
步骤1:XML 准备
打开 RVS,加载 box_sort_offline.xml 。
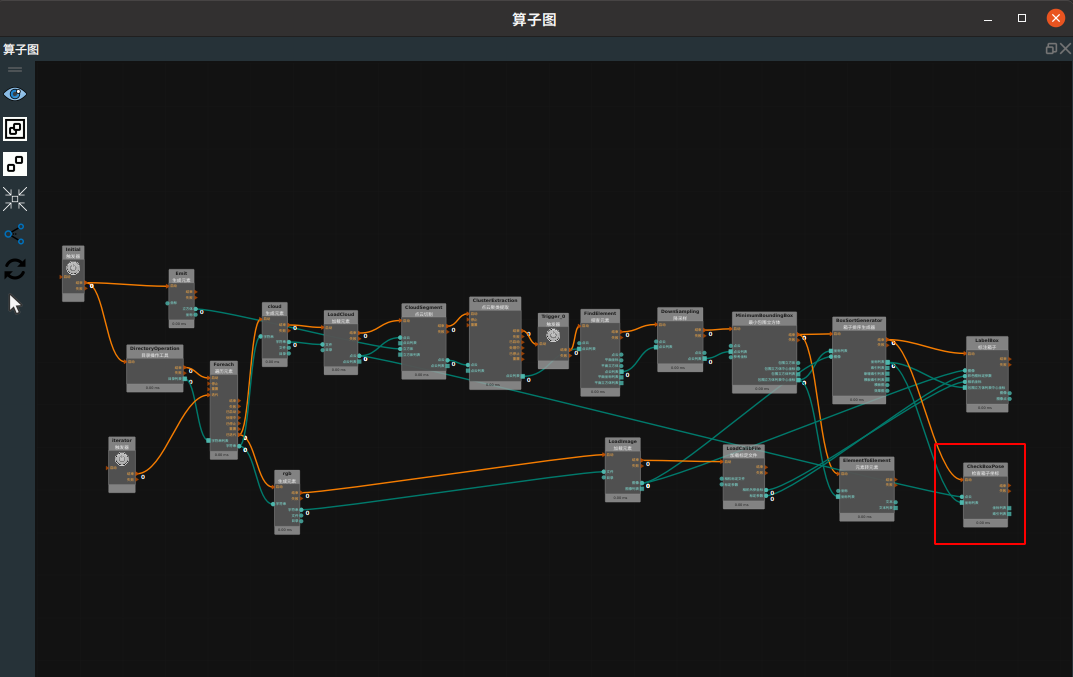
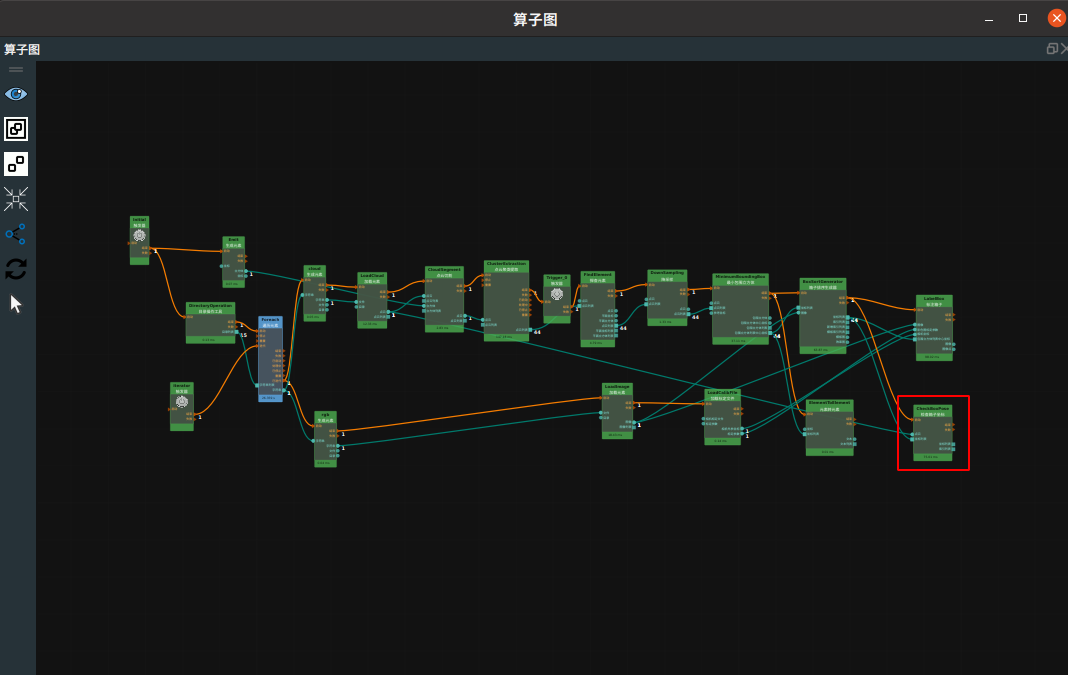
步骤2:运行
点击 RVS 运行按钮。
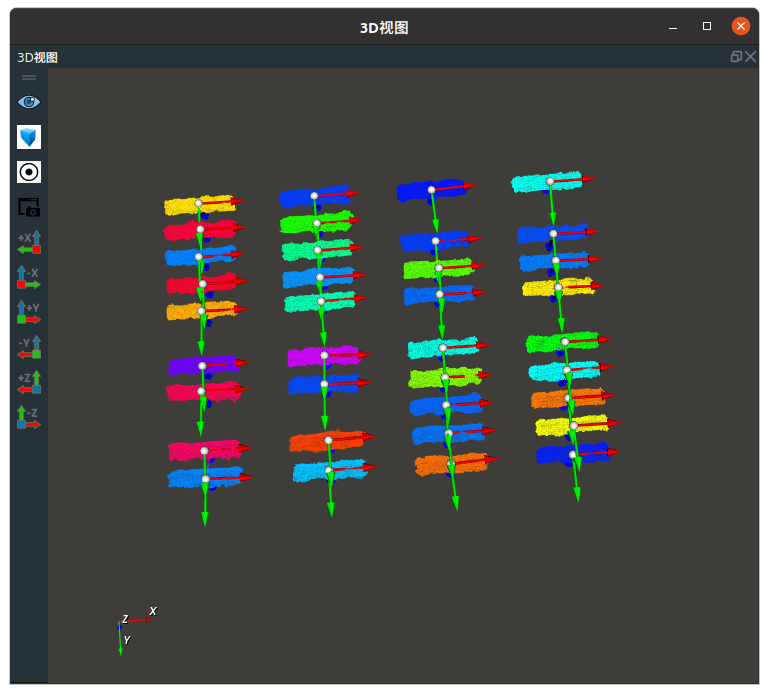
运行结果
自动触发一次XML。
打开
CheckBoxPose算子的坐标列表可视化属性查看结果。