SimulatedRobotResource 机器人仿真控制资源
SimulatedRobotResource 算子属于资源类线程算子,用于在 RVS 的分线程中启动一个机器人相机仿真控制资源。
通过添加机器人仿真控制资源,加载数模文件,可以在 RVS 软件内控制机器人仿真移动与姿态控制。这样可以在没有实际硬件的情况下进行仿真和测试。
算子参数
自动启动/auto_start:用于自动开启资源算子。是/True:打开 RVS 软件后第一次进入运行状态时自动开启资源线程。
否/False:不自动开启资源线程。
启动/start:用于开启资源算子。是/True:勾选为是,开启资源线程。
否/False:不启动资源线程。
停止/stop:用于停止资源算子。是/True:勾选为是,停止资源线程。
否/False:不停止资源线程。
重置/reset:重置该资源。资源算子已经运行后,如果重新更改属性参数,需要点击重置,然后重新勾选启动运行。机器人名称/robot_name:可填写仿真机器人名称。默认:SimulatedRobot。机器人模型文件/robot_file:机器人数模文件名。文件格式: *.rob 。
说明
需要提前向图漾技术支持人员申请所需要的机器人数模文件。
工具模型文件/tool_file:夹具吸盘等工具等文件名。最大关节速度/max_joint_velocity:用于控制机器人 MoveJoints 时的关节最大速度。单位:弧度每秒。默认值:3.1。最大关节加速度/max_joint_acceleration:用于控制机器人 MoveJoints 时的关节最大加速度。单位:弧度每平方秒。默认值:10。最大线性速度/max_linear_velocity:用于控制机器人线性运动时的最大线速度。单位:米每秒。默认值:1。最大线性加速度/max_linear_acceleration:用于控制机器人线性运动时的线速最大加速度。单位:米每平方秒。默认值:3。启用避撞/enable_collision:用于选择机器人避撞功能是/True:勾选为是,启用机器人避撞功能。
否/False:不启用机器人避撞功能。
机器人/robot:设置机器人数模在 3D 视图中的可视化属性。 打开机器人仿真模型可视化。
打开机器人仿真模型可视化。 关闭机器人仿真模型可视化。
关闭机器人仿真模型可视化。 设置机器人仿真模型的颜色。取值范围:[-2,360],默认值:-2。
设置机器人仿真模型的颜色。取值范围:[-2,360],默认值:-2。 设置机器人仿真模型的透明度。取值范围:[0,1],默认值:1。
设置机器人仿真模型的透明度。取值范围:[0,1],默认值:1。 设置机器人仿真模型机器人不实时加载更新。默认不更新,该参数主要用于生成机器人模型时调参查看效果。
设置机器人仿真模型机器人不实时加载更新。默认不更新,该参数主要用于生成机器人模型时调参查看效果。 设置机器人仿真模型机器人实时加载更新。
设置机器人仿真模型机器人实时加载更新。
目标机器人/target_robot:设置仿真机器人目标机器人的参数,常与 RobotMovement 算子中的显示目标机器人参数配合使用。- 打开机器人仿真模型可视化。
- 关闭机器人仿真模型可视化。
- 设置机器人仿真模型的颜色。取值范围:[-2,360],默认值:-2。
- 设置机器人仿真模型的透明度。取值范围:[0,1],默认值:1。
- 设置机器人仿真模型机器人不实时加载更新。默认不更新,该参数主要用于生成机器人模型时调参查看效果。
- 设置机器人仿真模型机器人实时加载更新。
功能演示
使用 SimulatedRobotResource 加载 UR5 机器人数模。
步骤1:算子准备
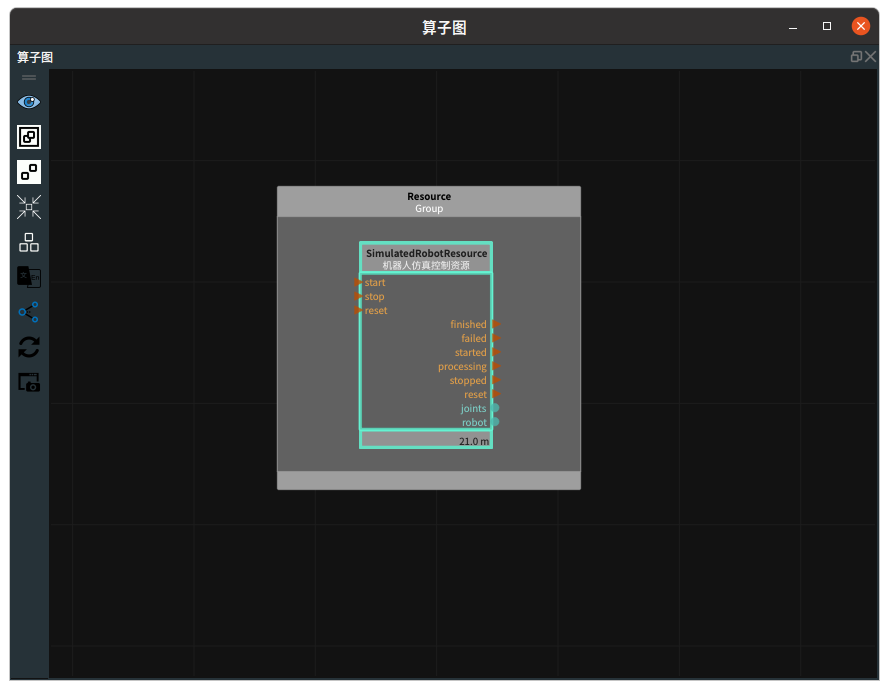
添加 SimulatedRobotResource 算子至算子图。
步骤2:设置算子参数
设置 SimulatedRobotResource 算子参数:
自动启动 → 是
机器人模型文件 → UR5 数模文件名(example_data/UR5/UR5.rob)
工具模型文件 → 吸盘工具文件名(example_data/Tool/EliteRobotSucker1.tool.xml)
机器人 →
步骤3:连接算子
步骤4:运行
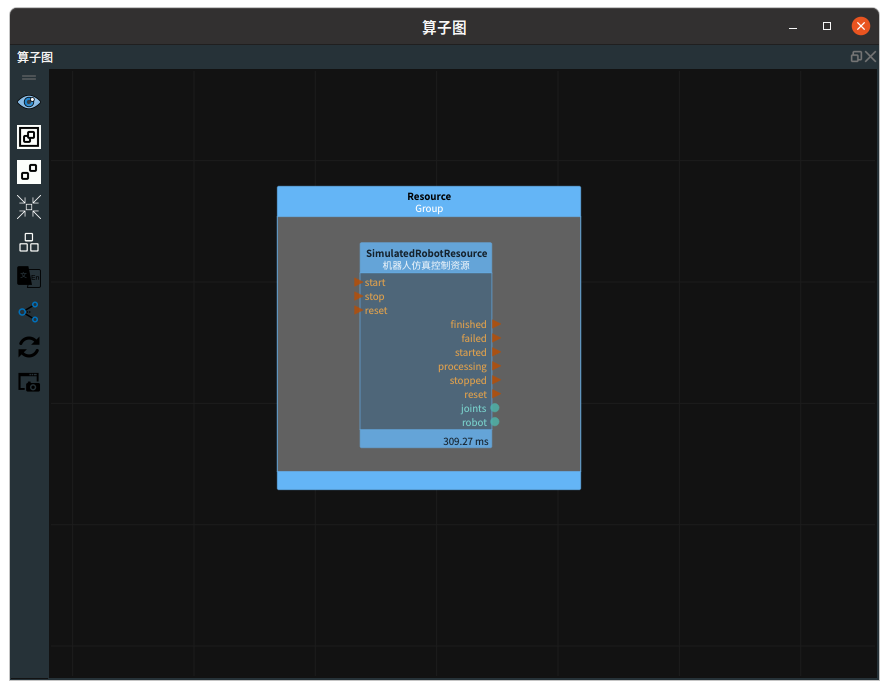
点击 RVS 运行按钮, SimulatedRobotResource 资源算子启动成功。
运行结果
打开 RVS 的运行按钮,SimulatedRobotResource 算子会自动触发,并变为蓝色,表示机器人仿真控制资源算子启动成功。
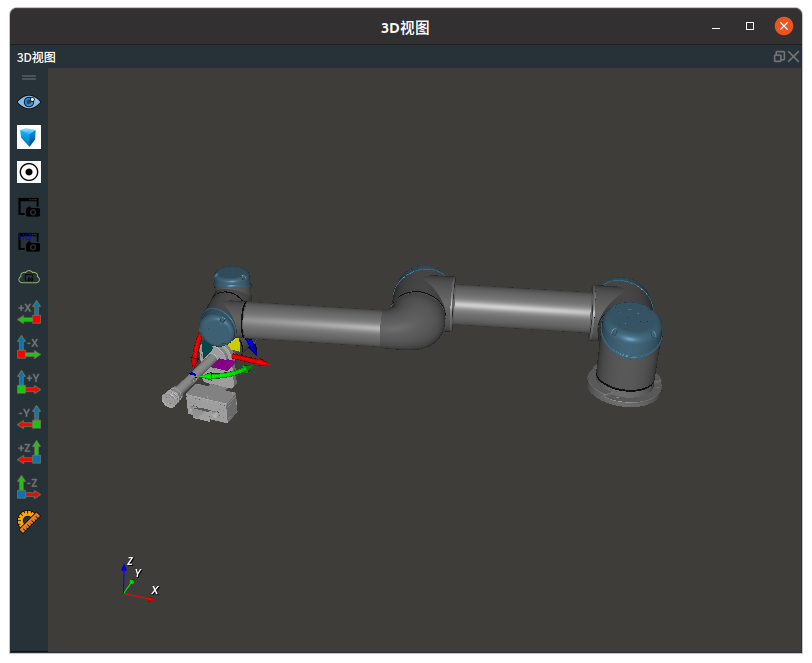
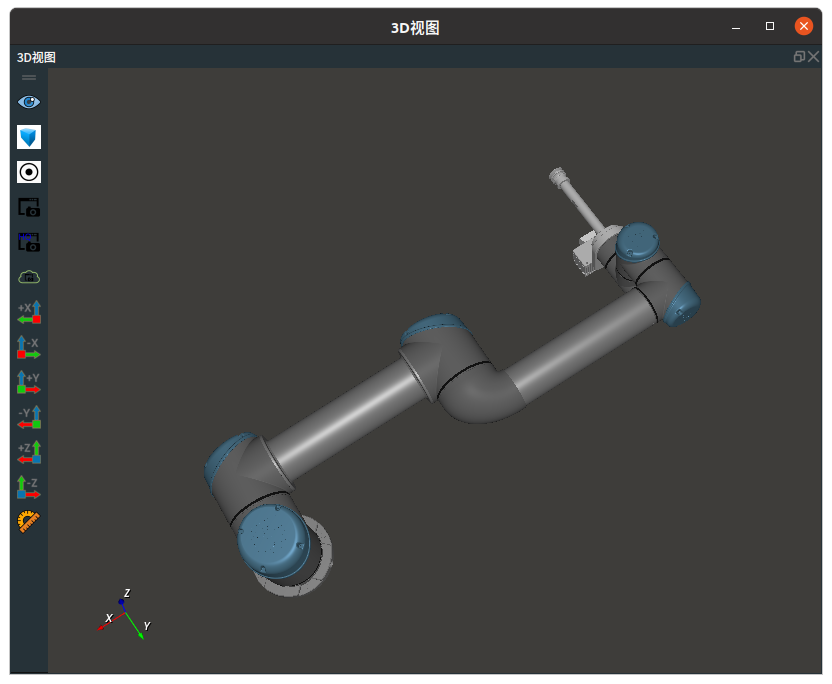
在 3D 视图中显示加载 UR5 机器人和其吸盘工具。
双击机器人弹出机器人控制面板。调整参数控制机器人。

机器人基座标、机器人TCP、工具TCP 勾选后,在 3D 视图中显示对应坐标。
关节值编辑栏(黄色框)输入对应的角度来调整机器人关节角度。
直接拖动右侧的浮标(绿色框)控制机器人关节转动。
主动控制机器人移动到某个位置:勾选 Motion(紫色框) ,勾选机器人TCP,查看到机器人末端的 TCP pose 姿态。拖动下图的箭头,可以带动整个机器人进行移动。移动过程中的机器人姿态信息可以随时在控制面板中查阅。