TyCameraSimResource 图漾相机仿真资源
TyCameraSimResource 算子属于资源类线程算子,用于在 RVS 的分线程中启动一个图漾相机仿真资源。
如果没有图漾相机时,可以通过添加图漾相机仿真资源来实现加载采集的点云、彩色图、深度图的功能。这样可以在没有实际硬件的情况下进行仿真和测试。
算子参数
自动启动/auto_start:用于自动开启资源算子。是/True:打开 RVS 软件后第一次进入运行状态时自动开启资源线程。
否/False:不自动开启资源线程。
启动/start:用于开启资源算子。是/True:勾选为是,开启资源线程。
否/False:不启动资源线程。
停止/stop:用于停止资源算子。是/True:勾选为True,停止资源线程。
否/False:不停止资源线程。
重置/reset:重置该资源。在该资源算子已经运行后,如果重新更改属性参数,需要点击重置,然后重新勾选启动运行。相机ID/camera_id:填入仿真图漾相机 ID 。默认:tycam_sim。输出彩色图像/output_color:设置是否输出彩色图像。True:输出。
False:不输出。
加载模式:选择加载采集的点云、彩色图、深度图的模式。File:文件模式。输入单个文件路径,将输出对应的彩色图、深度图和点云。
彩色图像文件/color_image_file:加载彩色图像文件名。如:rgb.png。深度图像文件/depth_image_file:加载深度图像文件名。如:depth.png。点云文件/pointcloud_file:加载点云文件名。如:cloud.pcd。
Directory:目录模式。输入目录应包含子目录,每个子目录中包含点云、深度图和彩色图。
目录:加载目录路径。
相机深度图标定文件:加载相机深度图标定文件名。如:ty_depth_calib_fs820_207000128000.txt。相机彩色图标定文件:加载相机彩色图标定文件名。如:ty_color_calib_fs820_207000128000.txt。
功能演示
使用 TyCameraSimResource 加载使用图像相机资源采集的点云、彩色图、深度图。
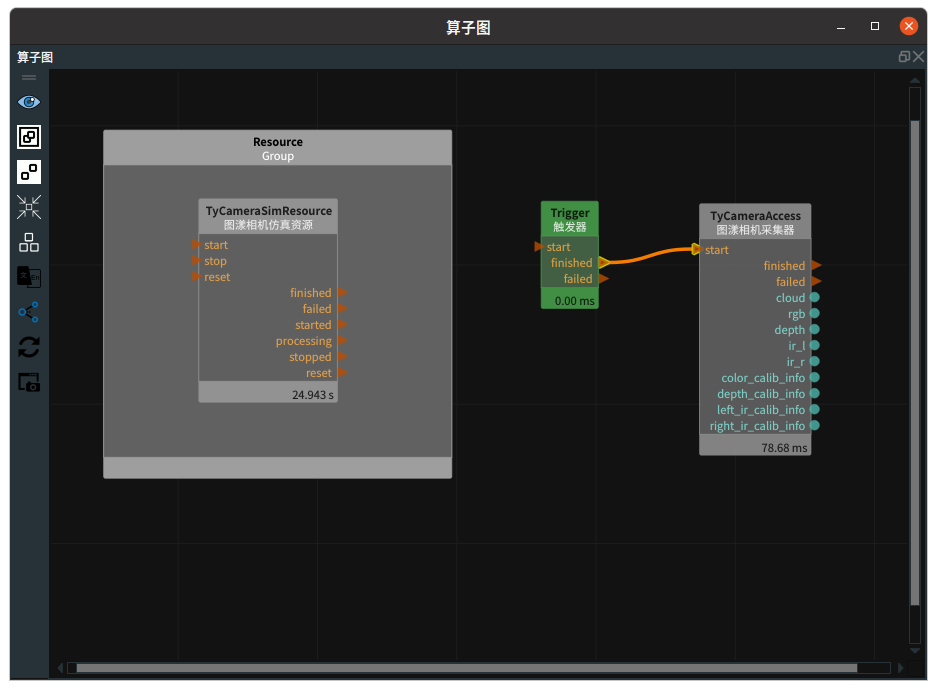
步骤1:算子准备
添加 TyCameraSimResource 、Trigger 、TyCameraAccess 算子至算子图。
步骤2:设置算子参数
设置 TyCameraSimResource 算子参数:
自动启动 → 是
类型 → File
彩色图像文件 →彩色图像文件名(example_data/TyCameraResource/rgb.png)
深度图像文件 → 深度图像文件名(example_data/TyCameraResource/depth.png)
点云文件 → 点云文件名(example_data/TyCameraResource/cloud.pcd)
设置 TyCameraAccess 算子参数:
相机资源 → TyCameraSimResource
点云 →

彩色 →
深度 →
步骤3:连接算子
步骤4:运行
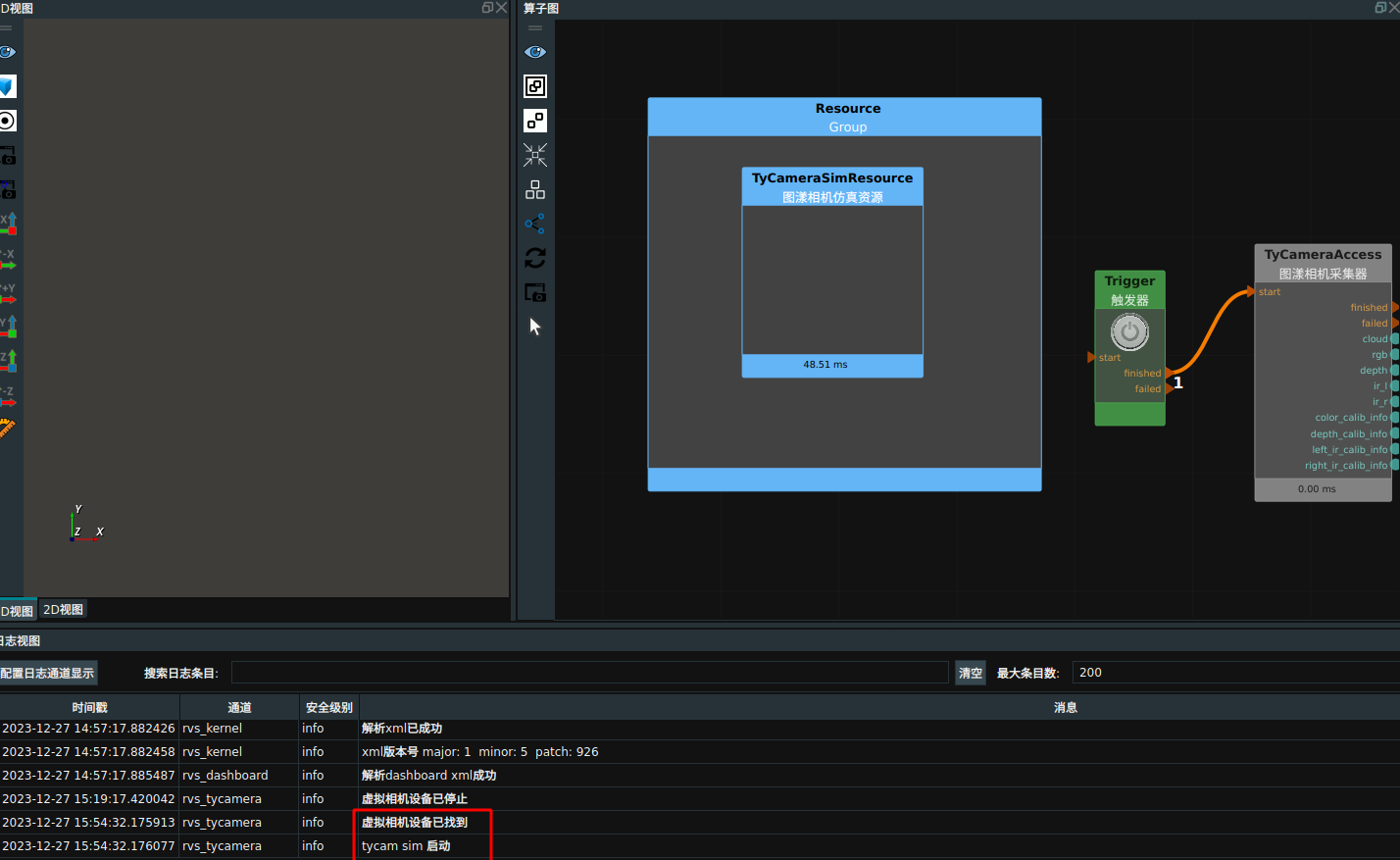
点击 RVS 运行按钮, TyCameraSimResource 资源算子启动成功。
成功后,触发 Trigger 算子。
运行结果
打开 RVS 的运行按钮,TyCameraSimResource 算子会自动触发,并变为蓝色,日志栏会同时打印算子运行说明如下图所示,表示图漾仿真资源算子启动成功。
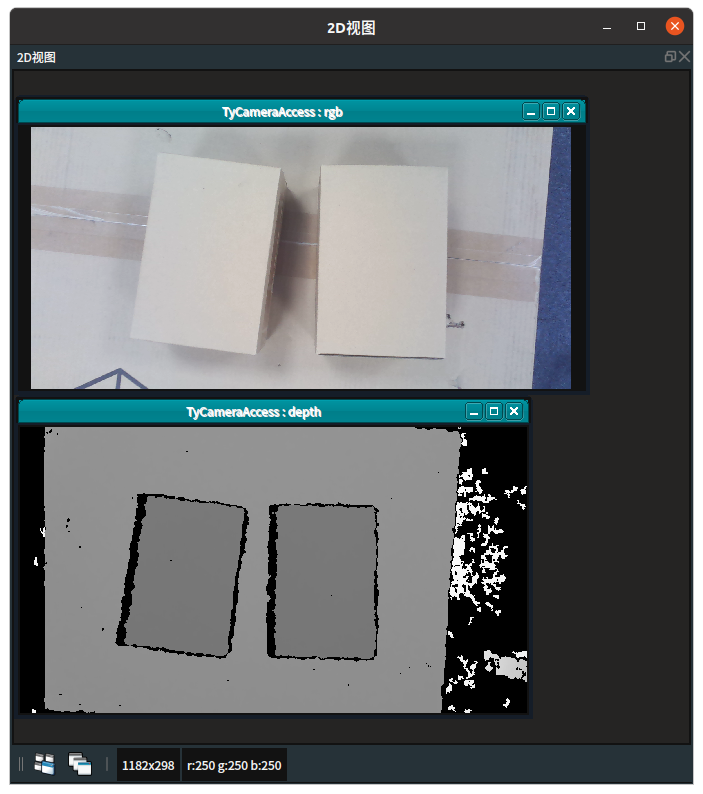
当触发 Trigger 算子后,TycameraAccess 运行完成后,在 2D 视图中显示彩色图像和深度图像。
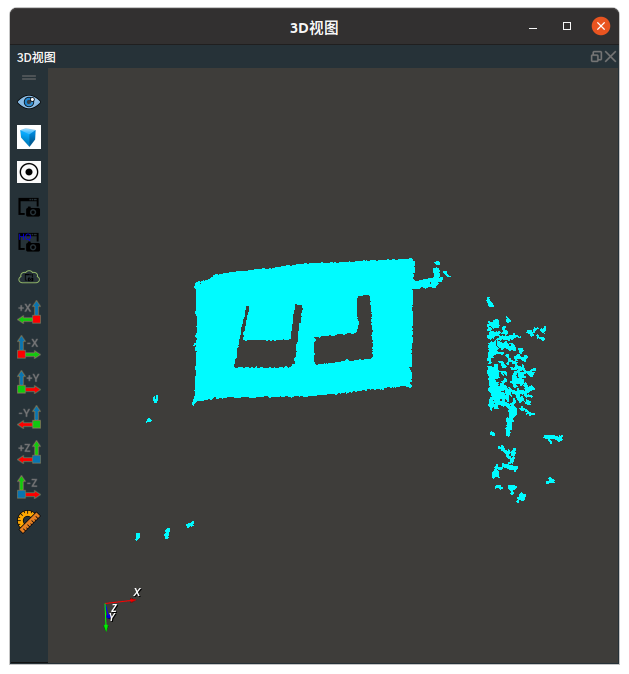
在 3D 视图中显示点云。