TyImageToCloud 图漾深度转换成点云
将图漾相机拍摄的深度图转换为点云输出。
算子参数
相机深度图标定文件:输入相机深度图标定文件。默认值:ty_depth_calib.txt。相机彩色图标定文件:输入相机彩色图标定文件。默认值:ty_color_calib.txt。比例:点云在 3D 视图中显示比例。默认值:0.001。点云:设置点云 3D视图中的可视化属性。 打开点云可视化。
打开点云可视化。 关闭点云可视化。
关闭点云可视化。 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
depth_image:数据类型:Image
输入内容:深度图
color_image:数据类型:Image
输入内容:彩色图
depth_calib_info:数据类型:CalibInfo
输入内容:相机深度图标定文件
color_calib_info:数据类型:CalibInfo
输入内容:相机彩色图标定文件
输出:
cloud:数据类型:PointCloud
输出内容:点云
功能演示
使用 TyImageToCloud 将图漾相机拍摄的深度图转换成点云。
说明
需要保存同一组彩色图和深度图。
步骤1:算子准备
添加 Trigger 、Load(2个)、TyImageToCloud 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数
算子名称 → LoadColorImage
类型 → Image
文件 → example_data/TyImageToCloud/rgb.png
图像 →
设置 Load_1 算子参数
算子名称 → LoadDepthImage
类型 → Image
文件 → example_data/TyImageToCloud/depth.png
图像 →
设置TyImageToCloud 算子参数
相机深度图标定文件 → example_data/TyImageToCloud/ty_depth_calib_fs820_207000115384.txt
相机彩色图标定文件 → example_data/TyImageToCloud/ty_color_calib_fs820_207000115384.txt
点云 →
步骤3:连接算子
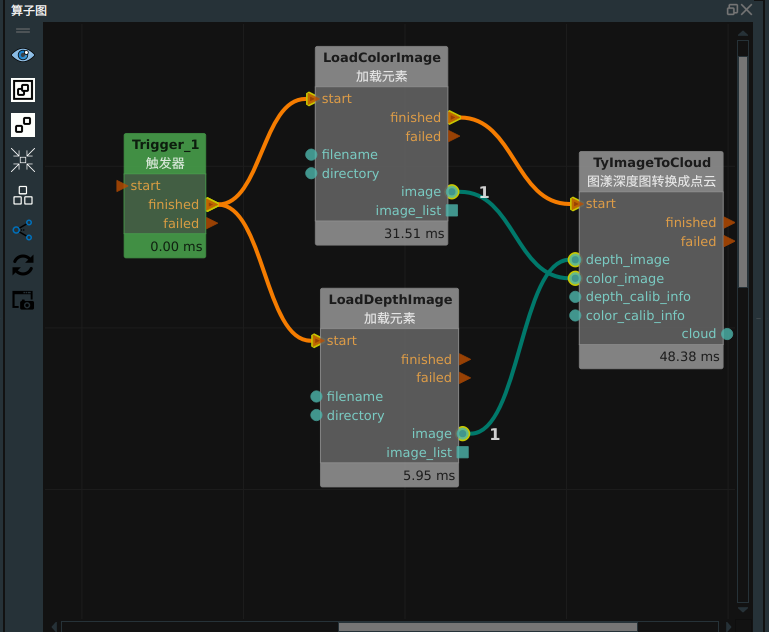
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
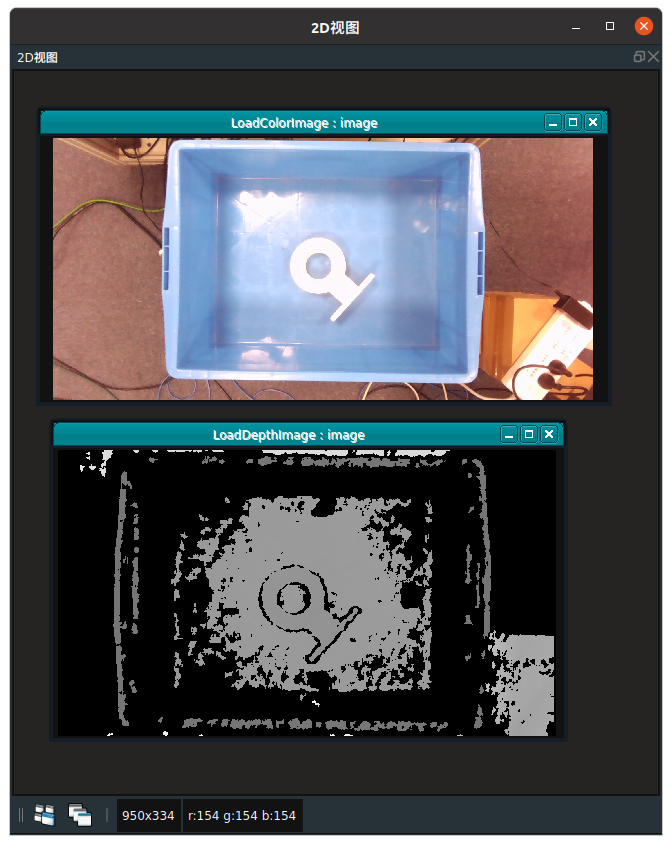
2D 视图中显示加载的彩色图和深度图,如下图所示:
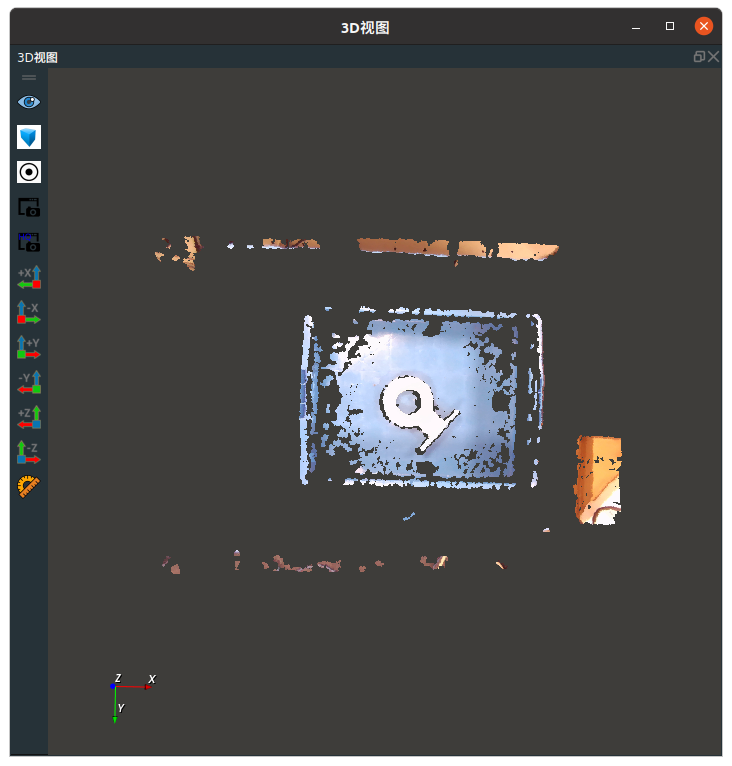
3D 视图中显示转换成的点云,如下图所示: