TyROISegment 图漾相机ROI切割
TyROISegment 算子用于设置深度图/彩色图的 ROI 区域来分割点云。
算子参数
选择模式:选择框选ROI区域的模式。分为 Depth 和 RGB。说明
当在彩色图或深度图上框选ROI时,可以自动切换到指定的模式。
roi_x:设置 ROI 区域的左顶点的像素坐标(列)。roi_y:设置 ROI 区域的左顶点的像素坐标(行)。roi_w:设置 ROI 区域的宽度(列)。roi_h:设置 ROI 区域的高度(行)。点云/cloud:设置点云在3D 视图中的可视化属性。 打开点云可视化。
打开点云可视化。 关闭点云可视化。
关闭点云可视化。 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
彩色/color:设置彩色图的在 2D 视图中的可视化属性。- 打开彩色图可视化。
- 关闭彩色图可视化。
深度/depth:设置深度图在 2D 视图中的可视化属性。- 打开深度图可视化。
- 关闭深度图可视化。
立方体/cube:设置立方体在 3D 视图中的可视化属性。- 打开立方体可视化。
- 关闭立方体可视化。
- 设置立方体的的颜色。取值范围:[-2,360] 。默认值:-2 。
 设置立方体的透明度。取值范围:[0,1] 。默认值:1 。
设置立方体的透明度。取值范围:[0,1] 。默认值:1 。
数据信号输入输出
输入:
cloud:数据类型:PointCloud
输入内容:点云
rgb:数据类型:Image
输入内容:彩色图
depth:数据类型:Image
输入内容:深度图
color_calib_info:数据类型:CalibInfo
输入内容:彩色图相机参数
depth_calib_info:数据类型:CalibInfo
输入内容:深度图相机参数
输出:
cloud:数据类型:PointCloud
输出内容:分割区域点云
rgb:数据类型:Image
输出内容:彩色图
depth:数据类型:Image
输出内容:深度图
color_calib_info:数据类型:CalibInfo
输出内容:彩色图相机参数
depth_calib_info:数据类型:CalibInfo
输出内容:深度图相机参数
cube:数据类型:Cube
输出内容:包围框
功能演示
使用 TyROISegment 算子分割点云。
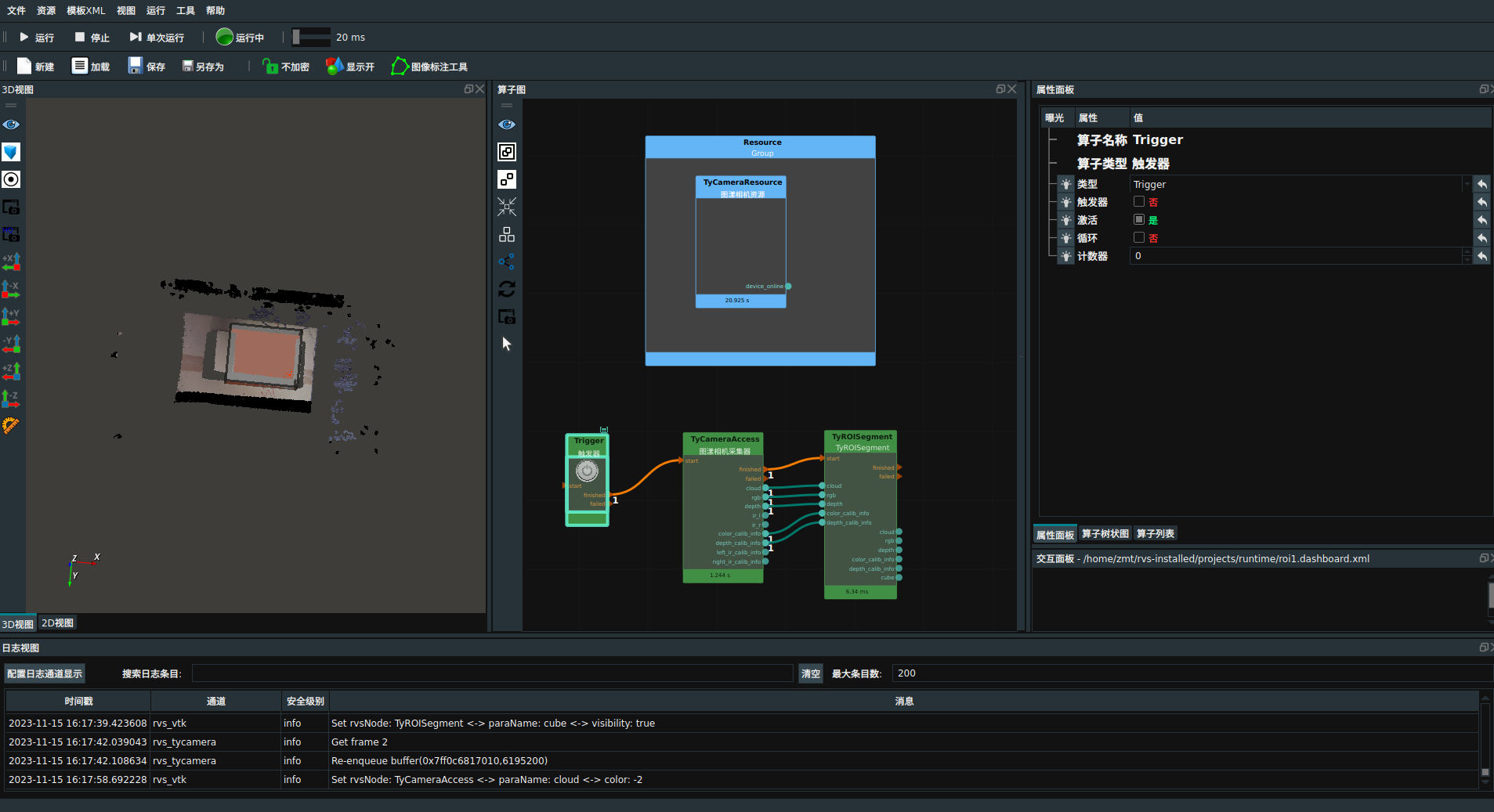
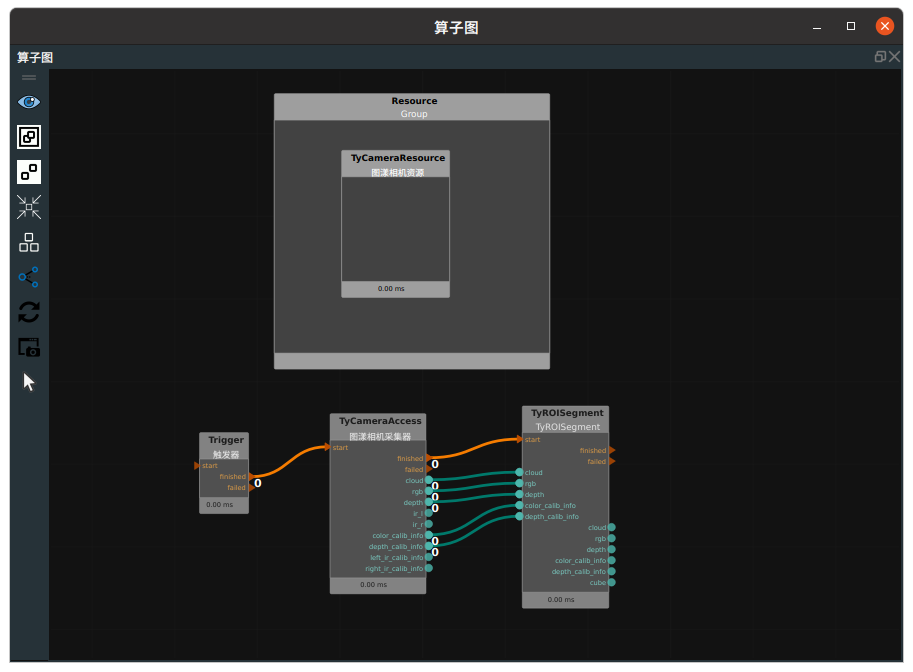
步骤1:算子准备
添加 TyCameraResource、Trigger、TyCameraAccess、TyROISegment 算子至算子图。
步骤2:设置算子参数
设置 TyCameraAccess 算子参数
点云 →
→ -2
设置 TyROISegment 算子参数
点云 →
彩色 →
深度 →
立方体 →
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
方法一:在 2D 视图中选择
框选模式并在 TyROISegment 输出的彩色图上选取 ROI 区。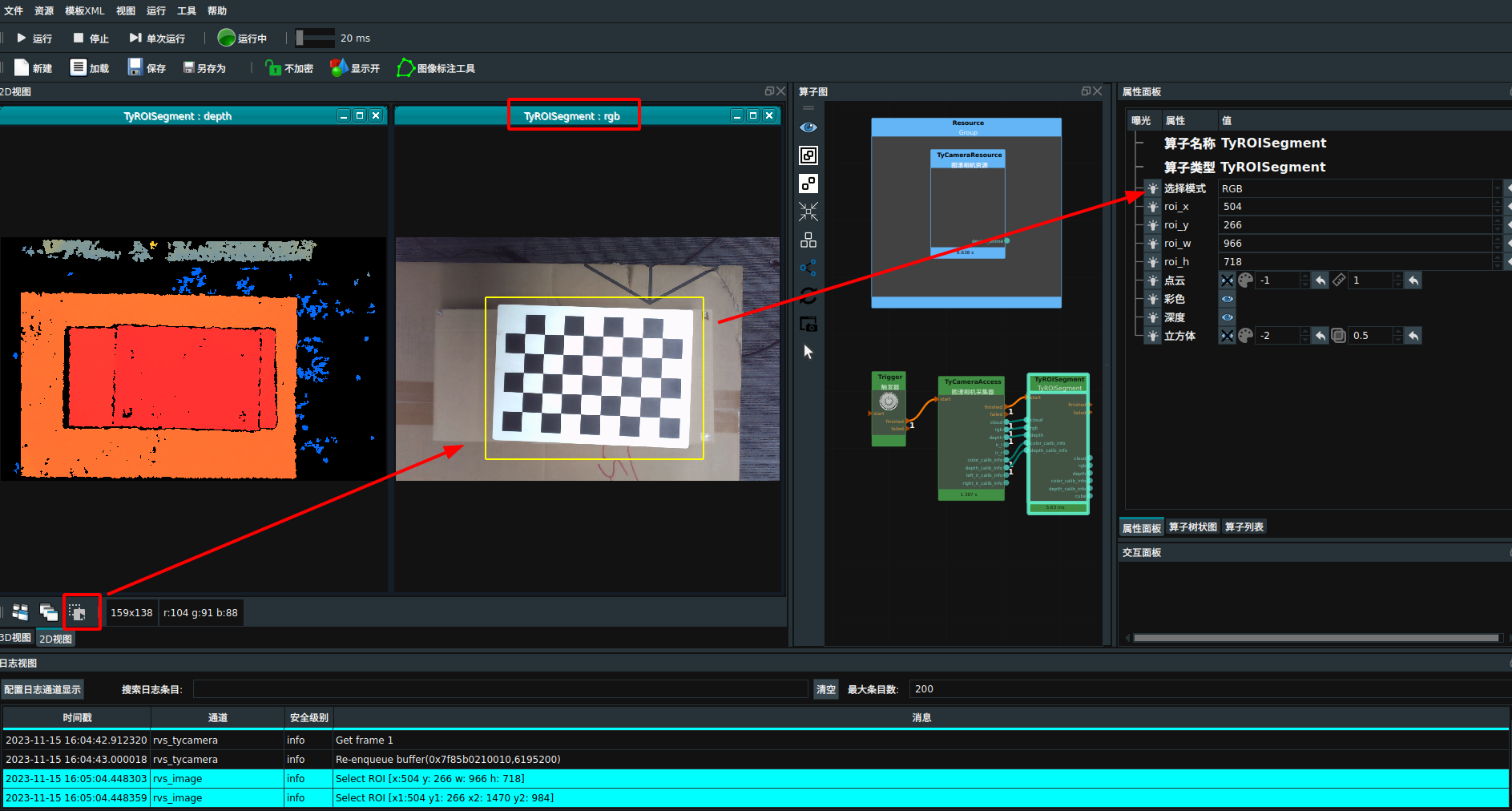
方法一:在 2D 视图中选择
框选模式并在 TyROISegment 输出的深度图上选取 ROI 区。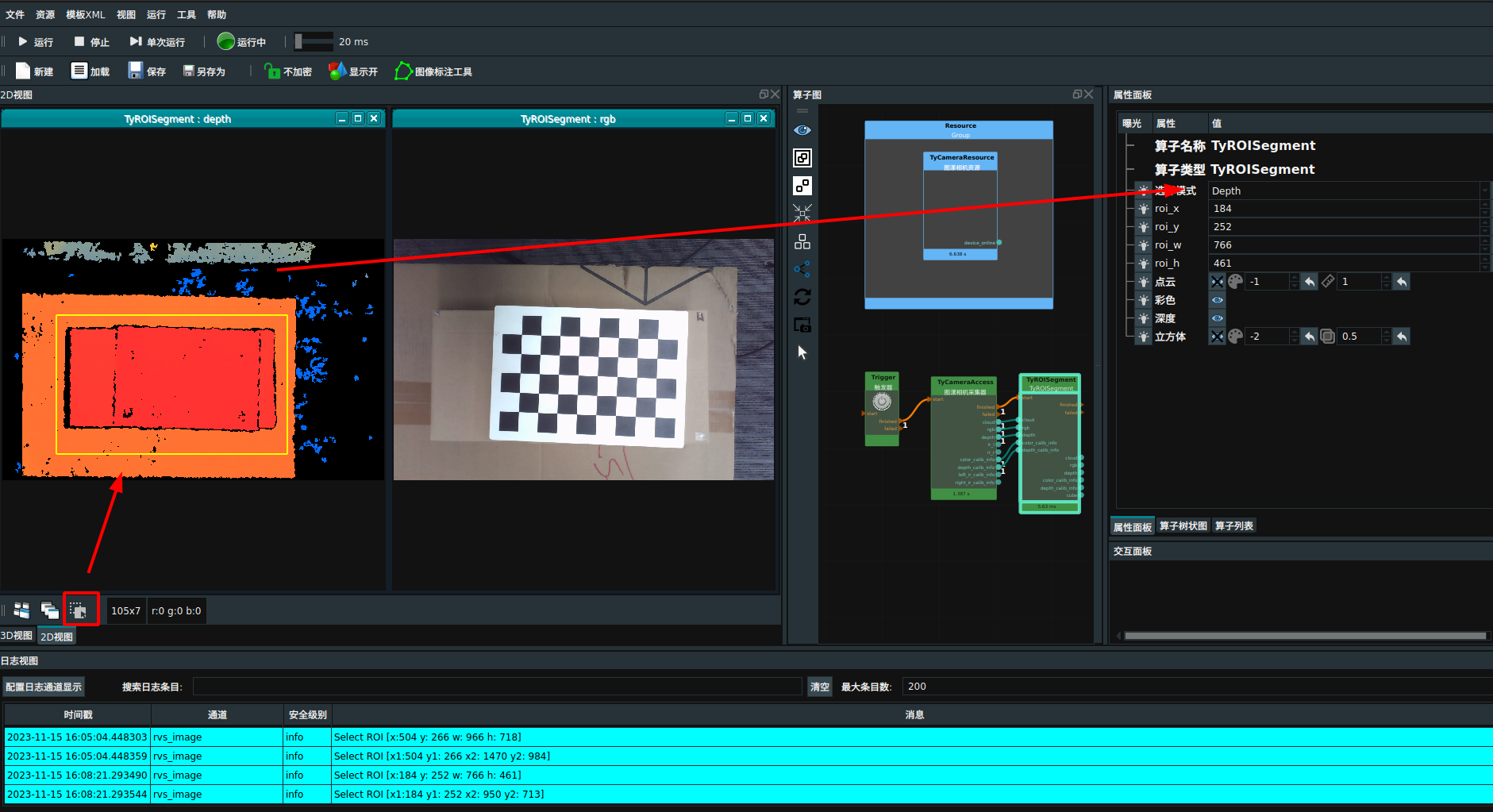
运行结果
再次触发 Trigger 算子,获得点云图对应的分割区域和包围框。结果如下图所示: