GenerateSamplePose 生成样本坐标
GenerateSamplePose 算子用于生成样本坐标。包含 BoxGridSample 、BoxRandomSample 、SphereRandomSample 、CameraPoseSample 。
| type | 功能 |
|---|---|
| BoxGridSample | 在设定范围均匀生成样本坐标。 |
| BoxRandomSample | 在设定范围随机生成样本坐标。 |
| SphereRandomSample | 在球体表面随机生成样本坐标。 |
| CameraPoseSample | 根据棋盘的位置生成相机的多组拍照位。 |
BoxGridSample
将 GenerateSamplePose 算子的 类型 设置为 BoxGridSample ,用于设定范围均匀生成样本坐标。
算子参数
起始坐标/start_pose:坐标起点。终止坐标/end_pose:坐标终点。x方向步长/step_x:在 X 轴方向,从 min_position 到 max_position 范围内均匀生成的样本坐标数量。默认值:1。y方向步长/step_y:在 Y 轴方向,从 min_position 到 max_position 范围内均匀生成的样本坐标数量。默认值:1。z方向步长step_z:在 Z 轴方向,从 min_position 到 max_position 范围内均匀生成的样本坐标数量。默认值:1。Roll旋转步长/step_rx:围绕 X 轴旋转方向,从 min_position 到 max_position 范围内均匀生成的样本坐标数量。默认值:1。Pitch旋转步长/step_ry:围绕 Y 轴旋转方向,从 min_position 到 max_position 范围内均匀生成的样本坐标数量。默认值:1。Yaw旋转步长/step_rz:围绕 Z 轴旋转方向,从 min_position 到 max_position 范围内均匀生成的样本坐标数量。默认值:1。坐标列表/pose_list:设置样本坐标 3D 视图中的可视化属性。 打开样本坐标可视化。
打开样本坐标可视化。 关闭样本坐标可视化。
关闭样本坐标可视化。 设置样本坐标的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
设置样本坐标的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
pose:数据类型:Pose
输入内容:pose 数据
输出:
pose_list:数据类型:PoseList
输出内容:样本坐标列表数据
功能演示
使用 GenerateSamplePose 中 BoxGridSample 根据加载的坐标在设置范围内均匀生成4个样本坐标。
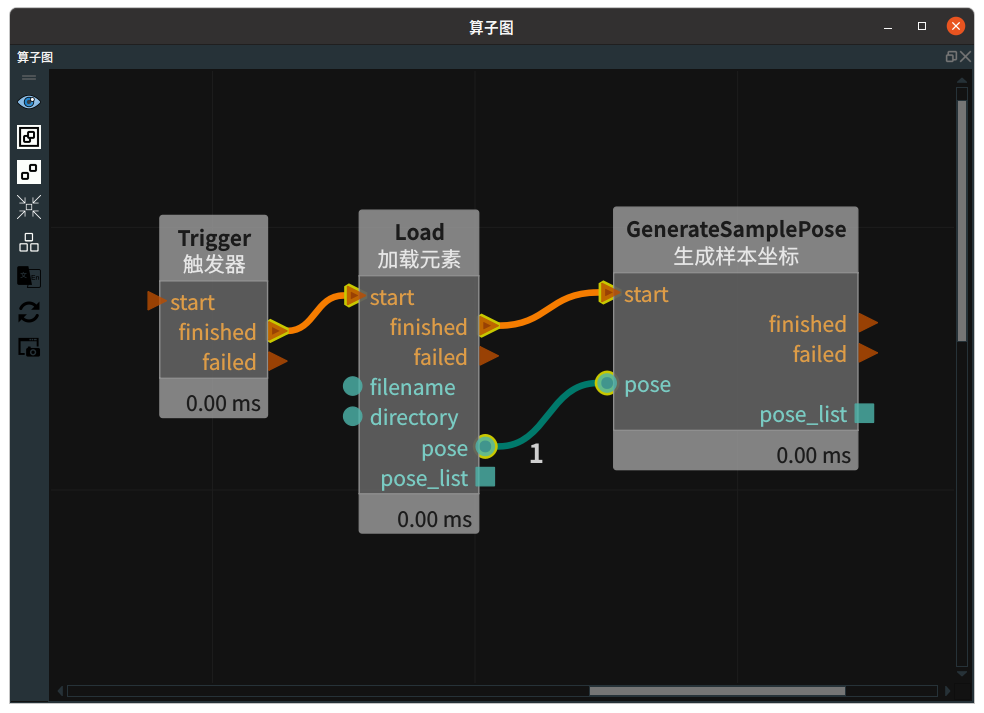
步骤1:算子准备
添加 Trigger 、Load 、GenerateSamplePose 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → pose
文件 →
 → 选择 pose 坐标文件名( example_data/pose/tcp.txt )
→ 选择 pose 坐标文件名( example_data/pose/tcp.txt )
设置 GenerateSamplePose 算子参数:
类型 → BoxGridSample
起始坐标 → 1 0 0 0 0 0
终止坐标 → 3 0 0 0 0 0
x方向步长 → 4
坐标列表 →
可视
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
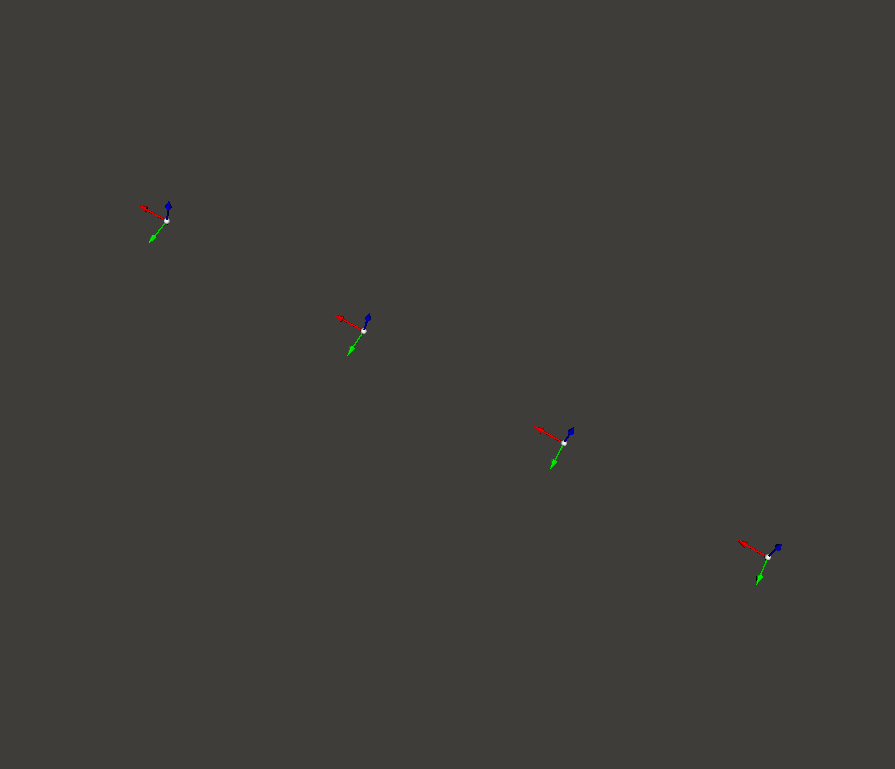
运行结果
运行结果如下图所示,在 3D 视图中显示生成的 4 个样本坐标。
BoxRandomSample
将 GenerateSamplePose 算子的 类型 设置为 BoxRandomSample ,用于在设定范围随机生成样本坐标。
算子参数
起始坐标/start_pose:坐标起点。终止坐标/end_pose:坐标终点。随机采样数量/random_sample_number:随机生成的坐标数量。默认值:1 。坐标列表/pose_list:设置随机生成的坐标 3D 视图中的可视化属性。- 打开样本坐标可视化。
- 关闭样本坐标可视化。
- 设置样本坐标的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据型号输入输出
输入:
pose:数据类型:Pose
输入内容:pose 数据
输出:
pose_list:数据类型:PoseList
输出内容:样本坐标列表数据
功能演示
使用 GenerateSamplePose算子中 BoxRandomSample 根据加载的坐标随机生成2个样本坐标。
步骤1:算子准备
添加 Trigger 、Load 、GenerateSamplePose 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → pose
文件 →
→ 选择 pose 坐标文件名( example_data/pose/tcp2.txt )坐标 →
可视 → 0.2
设置 GenerateSamplePose 算子参数:
类型 → BoxRandomSample
起始坐标 → -0.3 -0.2 -0.15 0 0 0
终止坐标 → 0.3 0.2 0.15 1 2 3
随机采样坐标 → 2
坐标列表 →
可视
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
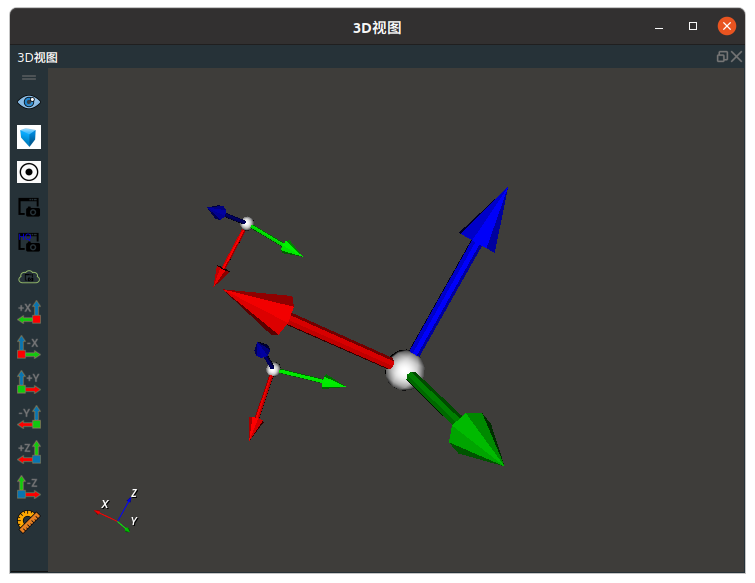
运行结果
结果如下图所示,在 3D 视图中显示加载的坐标和随机生成的2个样本坐标。
SphereRandomSample
将 GenerateSamplePose 算子的 类型设置为 SphereRandomSample ,在球体表面随机生成样本坐标。。
算子参数
初始方向数量/init_direction_number:生成样本坐标的数量。默认值:6 。表示在球体表面随机生成6个坐标。半径/radius:球体半径。默认值:1 ,单位:m 。只有半球/only_half_sphere:生成的坐标的位置。False :生成的坐标仅 Z 轴正方向的全球
True:生成的坐标仅 Z 轴正方向的半球。
坐标列表/pose_list:设置球体随机生成的样本坐标在 3D 视图中的可视化属性。- 打开样本坐标可视化。
- 关闭样本坐标可视化。
- 设置样本坐标的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
pose:数据类型:Pose
输入内容:pose 数据
输出:
pose_list:数据类型:PoseList
输出内容:样本坐标列表数据
功能演示
使用 GenerateSamplePose 中 SphereRandomSample 在生成的球体表面生成6个样本坐标。
步骤1:算子准备
添加 Trigger 、Emit(2个) 、GenerateSamplePose 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → Pose
坐标 →
可视
设置 Emit_1 算子参数:
类型 → Sphere
半径 → 1
球体 →
可视 → 0.5
设置GenerateSamplePose算子参数:
类型 → SphereRandomSample
坐标列表 →
可视 → 0.2其余参数默认
步骤3:连接算子
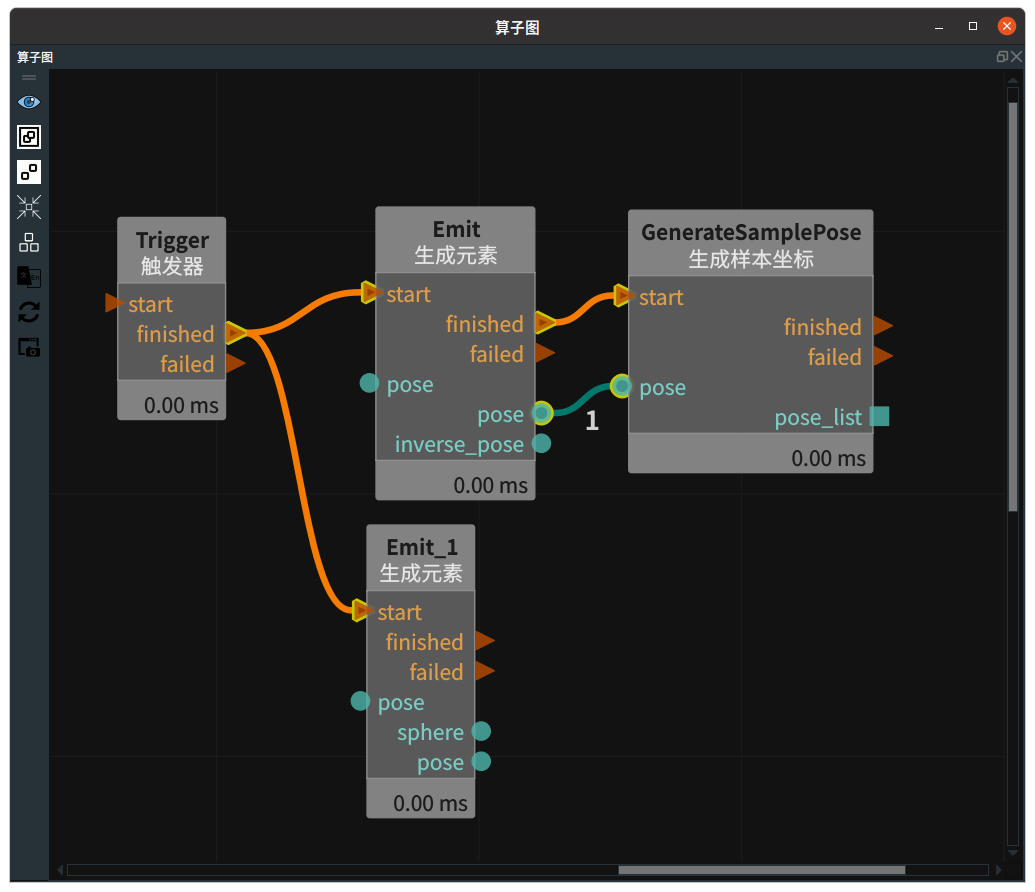
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
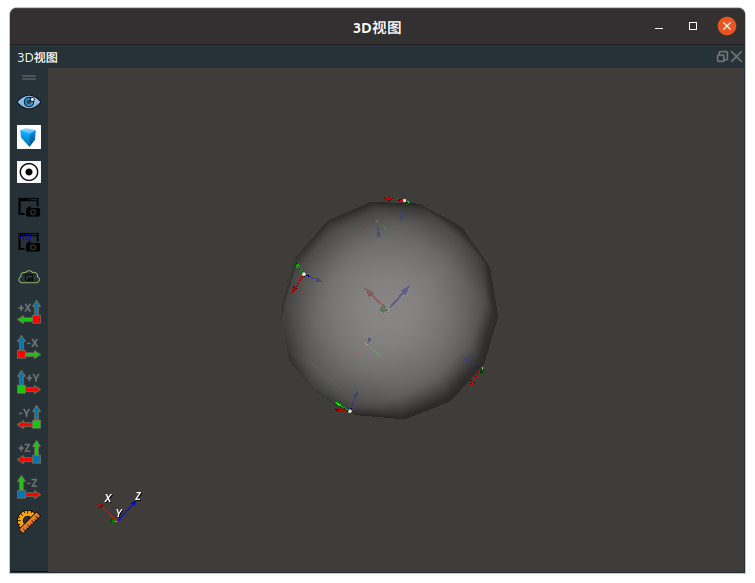
运行结果
如下图所示,在 3D 视图中显示加载的球体,其表面随机生成的6个坐标样本。
CameraPoseSample
将 GenerateSamplePose 算子的 类型 设置为 CameraPoseSample ,用于根据棋盘的位置生成相机的多组拍照位。棋盘的坐标分别绕 XYZ 轴做旋转,然后得到的旋转后的 pose 沿其 Z 轴负方向平移 radius ,得到的 pose 就是相机拍照位。
算子参数
半径/radius:相机拍照位到棋盘的距离。Roll度数范围/degree_range_rx:棋盘绕着 x 轴旋转的角度步长。Pitch度数范围/degree_range_ry:棋盘绕着 y 轴旋转的角度步长。Yaw度数范围/degree_range_rz:棋盘绕着 z 轴随机旋转的角度范围。采样数量/num_size:拍照位网格边长,默认值:3 。表示 3*3 的网格位置。取反/inverse:True:拍照位排序为由外到内螺旋排序。
False:拍照位排序为由内到外螺旋排序。
坐标列表/pose_list:设置生成的相机拍照位坐标列表的可视化属性。- 打开机拍照位坐标列表可视化。
- 关闭机拍照位坐标列表可视化。
- 设置机拍照位坐标列表的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
pose:数据类型:Pose
输入内容:棋盘坐标数据
输出:
pose_list:数据类型:PoseList
输出内容:相机拍照位列表数据
功能演示
将 GenerateSamplePose 算子中 CameraPoseSample 根据棋盘的位置生成相机的 9 组拍照位。
步骤1:算子准备
添加 Trigger 、Emit 、GenerateSamplePose 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → pose
坐标 →
可视 → 0.2
设置 GenerateSamplePose 算子参数:
类型 → CameraPoseSample
坐标列表 →
可视
步骤3:连接算子

步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
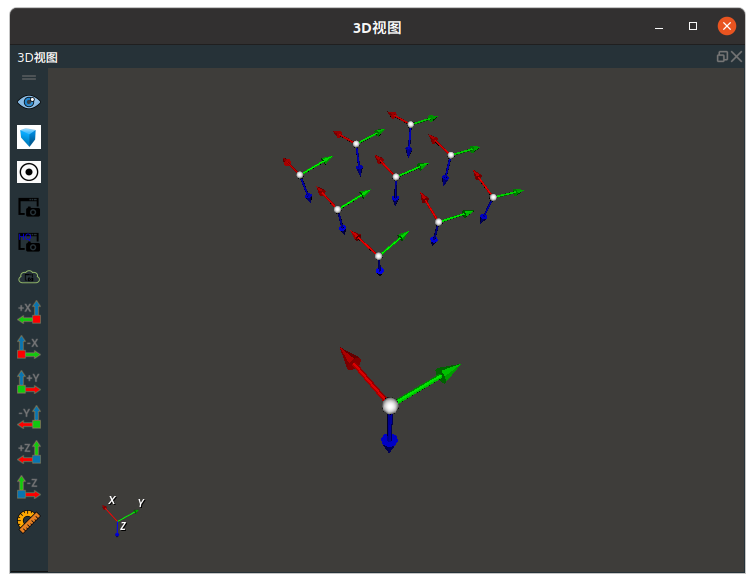
运行结果
如下图所示,在 3D 视图中显示棋盘的 9 个相机拍照位。