Measurement 测量
Measurement 算子用于计算各种距离。包括点到点的距离、点到线的距离、计算线长以及计算角度。
| 类型 | 功能 |
|---|---|
| 点到点的距离 | 计算 2 个坐标之间的距离 |
| 点到线的距离 | 计算坐标和线段之间的距离 |
| 计算线长 | 计算线段的长度 |
| 计算角度 | 计算 3 个坐标之间的角度 |
点到点的距离
将 Measurement 算子的 类型 设置为 点到点的距离 ,用于计算 2 个坐标之间的距离。
算子参数
线段/line:设置坐标间线段在 3D 视图中的可视化属性。 打开线段可视化。
打开线段可视化。 关闭线段可视化。
关闭线段可视化。 设置线段的颜色。取值范围:[-2,360] 。默认值:60 。
设置线段的颜色。取值范围:[-2,360] 。默认值:60 。 设置线段的线宽。取值范围:[1,100] 。默认值:1 。
设置线段的线宽。取值范围:[1,100] 。默认值:1 。
数据信号输入输出
输入:
坐标1:数据类型:Pose
输入内容:坐标
坐标2:数据类型:Pose
输入内容:坐标
输出:
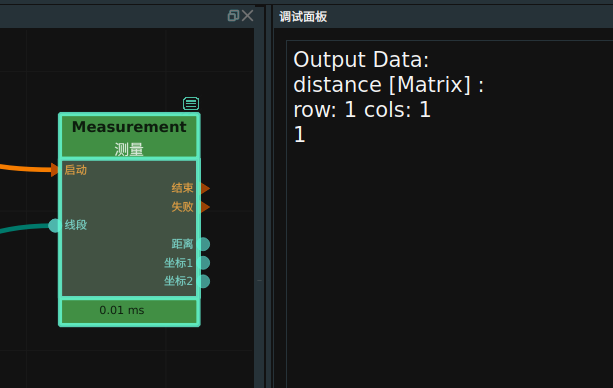
距离:数据类型:Matrix
输出内容:坐标1和坐标2之间的距离
线段:数据类型:Line
输出内容:坐标1和坐标2之间的线段
功能演示
将 Measurement 算子的 类型 设置为 点到点的距离 ,计算 2 个坐标之间的距离。
步骤1:算子准备
添加 Trigger 、Emit(2个) 、Measurement 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
算子名称 → 坐标1
类型 → Pose
坐标 →
可视
设置 Emit 算子参数:
算子名称 → 坐标2
类型 → Pose
坐标 → 1 0 0 0 0 0
坐标 →
可视
设置 Measurement 算子参数:
类型 → 点到点的距离
线段 →
可视
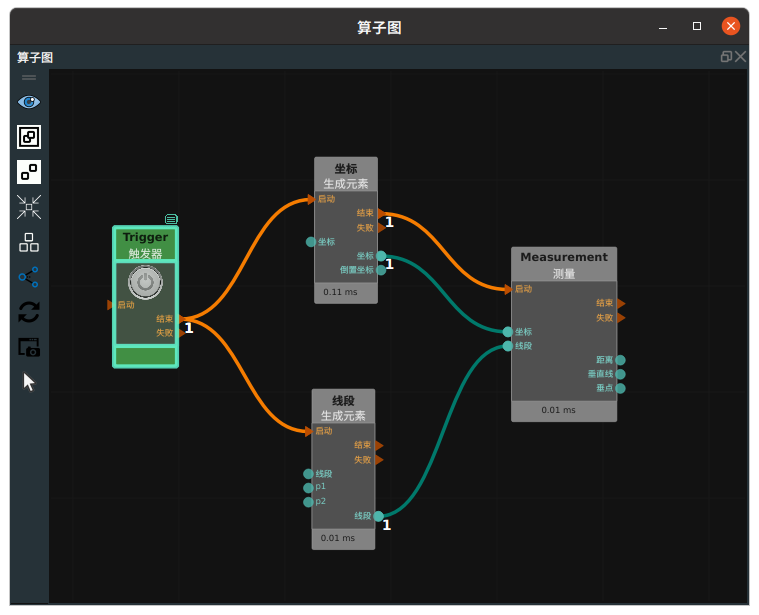
步骤3:连接算子
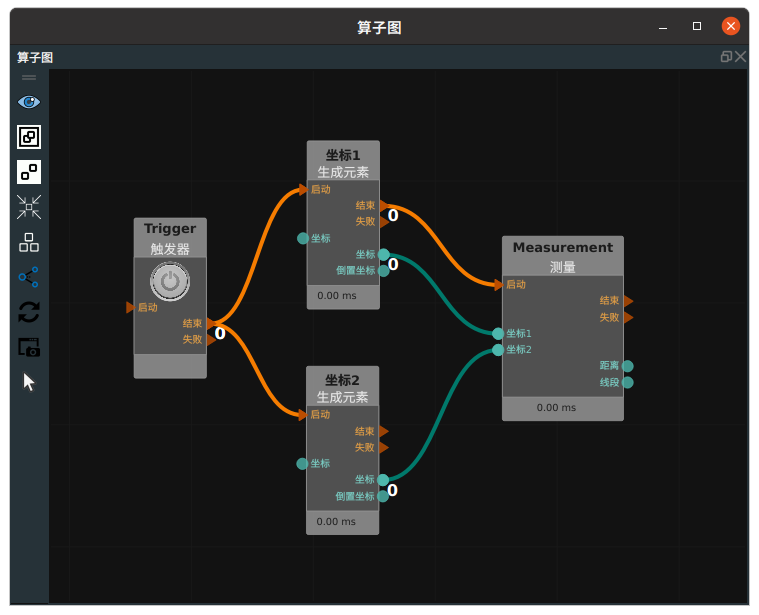
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
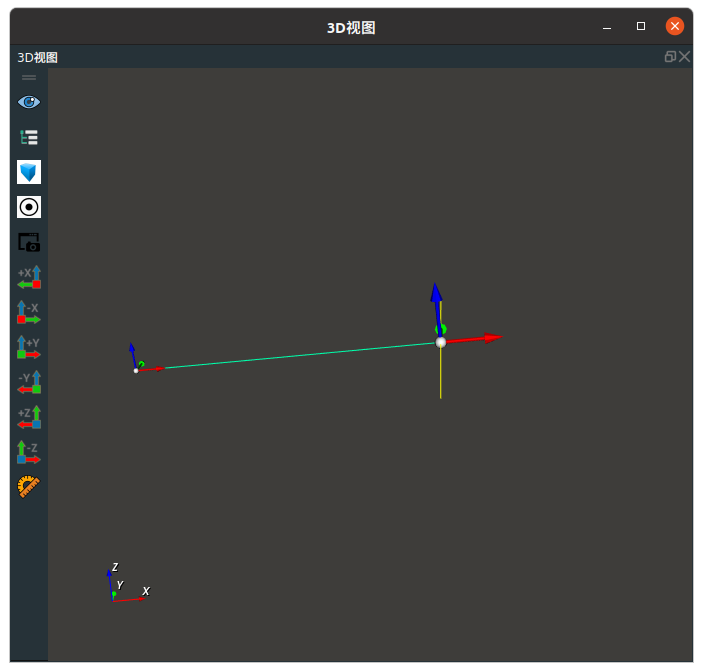
运行结果
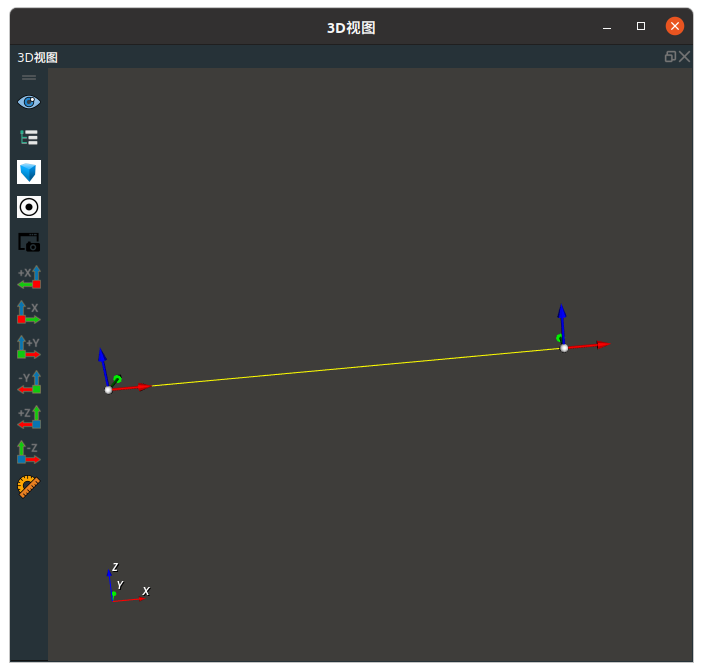
如下图所示,3D 视图中显示两个 Emit 算子的 pose 和 Measurement 算子的线段。
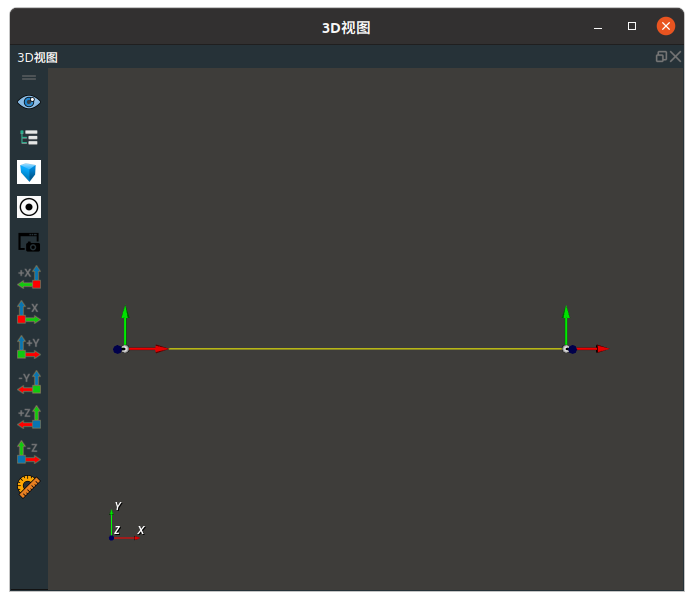
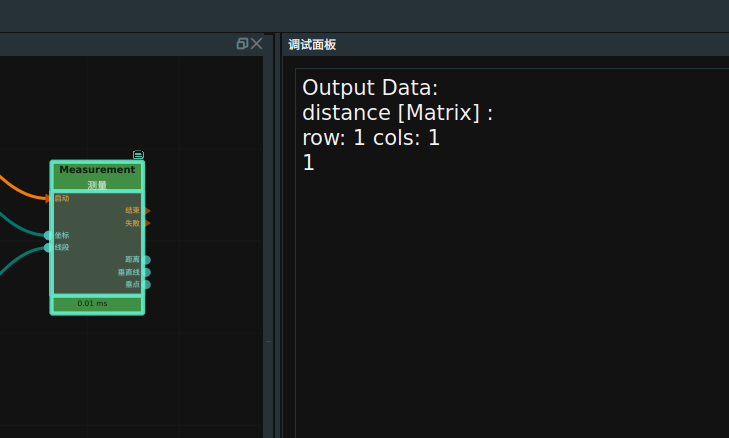
左键双击算子距离输出端口,在调试面板中输出坐标1和坐标2之间的距离。
点到线的距离
将 Measurement 算子的 类型 设置为 点到线的距离 ,用于计算 坐标与线段之间的距离。
算子参数
垂直线:设置垂直线在 3D 视图中的可视化属性。- 打开垂直线可视化。
- 关闭垂直线可视化。
- 设置垂直线的颜色。取值范围:[-2,360] 。默认值:60 。
- 设置垂直线的线宽。取值范围:[1,100] 。默认值:1 。
垂点:设置点到线的垂点在 3D 视图中的可视化属性。- 打开垂点可视化。
- 关闭垂点可视化。
 设置垂点的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
设置垂点的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
坐标:数据类型:Pose
输入内容:坐标
线段:数据类型:Line
输入内容:线段
输出:
距离:数据类型:Matrix
输出内容:点到线的距离
垂直线:数据类型:Line
输出内容:点到线的垂直线
垂点:数据类型:Line
输出内容:点到线的垂点
功能演示
将 Measurement 算子的 类型 设置为 点到线的距离 ,计算坐标与线段之间的距离。
步骤1:算子准备
添加 Trigger 、Emit 、Measurement 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
算子名称 → 坐标
类型 → Pose
坐标 → -1 0.5 0 0 0 0
坐标 →
可视
设置 Emit 算子参数:
算子名称 → 线段
类型 → Pose
p1 → 0 0 0 0 0 0
p2 → 0 1 0 0 0 0
线段 →
可视
设置 Measurement 算子参数:
类型 → 点到线的距离
垂线段 →
可视 → 160垂点 →
可视 → 0.2
步骤3:连接算子
步骤4:运行
点击 RVS 的运行按钮,触发 Trigger 算子。
运行结果
如下图所示,3D 视图中显示 Emit 算子生成黄色线段与坐标,Measurement 算子输出的蓝色垂直线和垂点。
双击 Measurement 算子距离输出端口,在调试面板中显示坐标与线段之间的距离。
计算线长
将 Measurement 算子的 类型 设置为 计算线长 ,用于计算线段的长度。
算子参数
坐标1/坐标2:设置线段两端坐标在3D视图中的可视化属性。- 打开坐标可视化。
- 关闭坐标可视化。
- 设置坐标的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
连段:数据类型:Line
输入内容:线段
输出:
距离:数据类型:Matrix
输出内容:线段的长度
坐标1:数据类型:Pose
输出内容:坐标
坐标2:数据类型:Pose
输出内容:坐标
功能演示
将 Measurement 算子的 类型 设置为 计算线长 ,计算线段的长度。
步骤1:算子准备
添加 Trigger 、Emit 、Measurement 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
算子名称 → 线段
类型 → Line
p1 → 0 0 0 0 0 0
p2 →1 0 0 0 0 0
线段 →
可视
设置 Measurement 算子参数:
类型 → 计算线长
坐标1 →
可视坐标2 →
可视
步骤3:连接算子
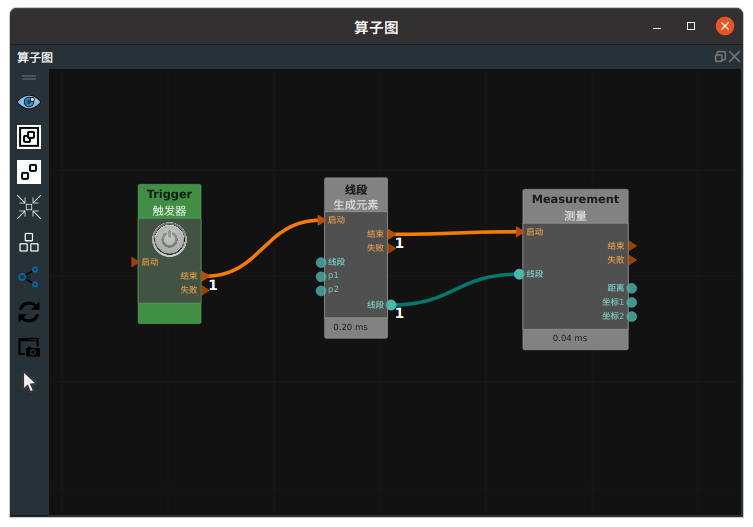
步骤4:运行
点击 RVS 的运行按钮,触发 Trigger 算子。
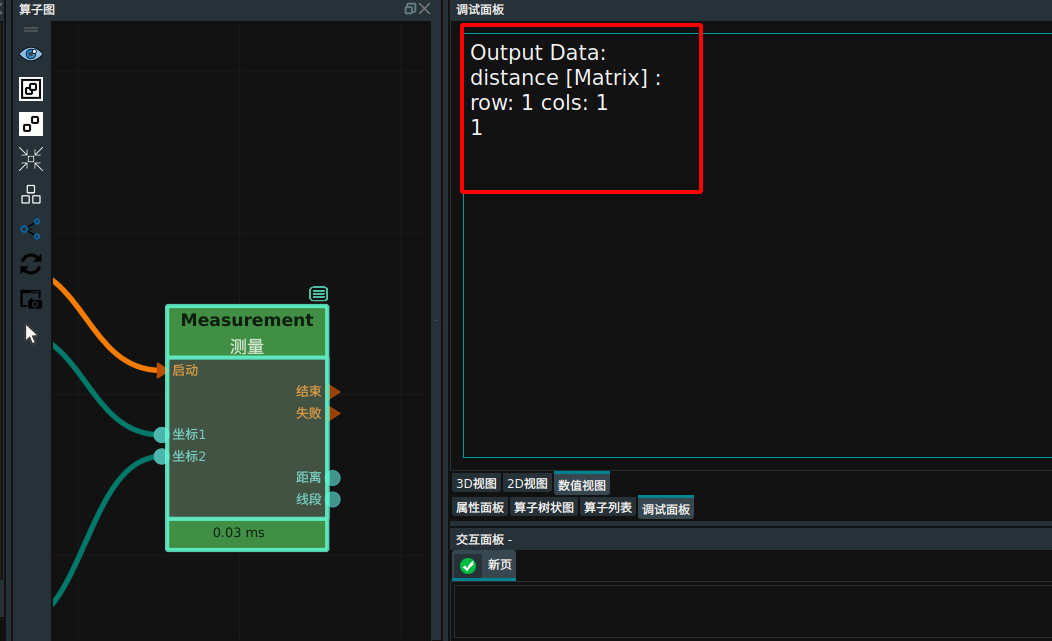
运行结果
如下图所示,3D 视图中显示 Emit 算子生成的线段以及 Measurement 算子的坐标1和坐标2。
双击 Measurement 算子距离输出端口,在调试面板中显示线段的长度。
计算角度
将 Measurement 算子的 类型 设置为 计算角度 ,用于计算 3 个坐标之间的角度。
算子参数
角度值类型:度数:输出结果为度数。
弧度:输出结果为弧度。
夹角:参考弧度。- 打开角度可视化。
- 关闭角度可视化。
- 设置角度的颜色。取值范围:[-2,360] 。默认值:60 。
- 设置角的线宽。取值范围:[1,100]。默认值:4 。
 标注角显示。
标注角显示。
数据信号输入输出
输入:
坐标1:数据类型:Pose
输入内容:坐标
坐标2:数据类型:Pose
输入内容:坐标
坐标3:数据类型:Pose
输入内容:坐标
输出:
角度值:数据类型:Matrix
输出内容:3 个坐标之间的角度
夹角:数据类型:Angle
输出内容:3 个坐标之间的夹角
功能演示
将 Measurement 算子的 类型 设置为 计算角度 ,计算 3 个坐标之间的角度。
步骤1:算子准备
添加 Trigger、Emit(3个) 、Measurement 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
算子名称 → 坐标1
类型 → 坐标
坐标 → 0 0 0 0 0 0
坐标 →
可视
设置 Emit 算子参数:
算子名称 → 坐标2
类型 → 坐标
坐标 → 1 0 0 0 0 0
坐标 →
可视
设置 Emit 算子参数:
算子名称 → 坐标3
类型 → 坐标
坐标 → 1 1 0 0 0 0
坐标 →
可视
设置 Measurement 算子参数:
类型 → 计算角度
角度值类型 →度数
参考角度 → 3
夹角 →
可视
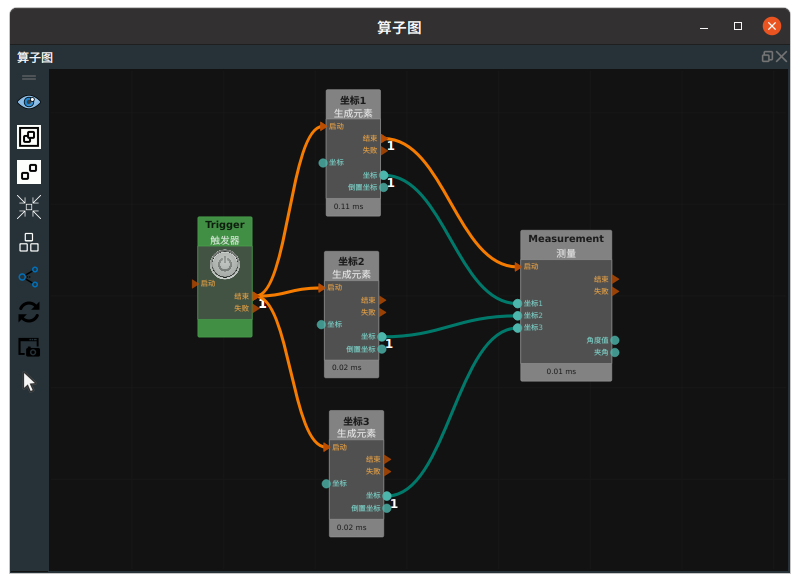
步骤3:连接算子
步骤4:运行
点击打开 RVS 的运行按钮,触发 Trigger 算子。
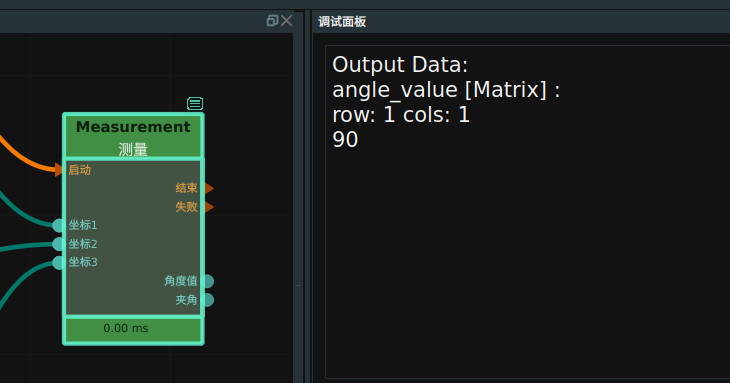
运行结果
如下图所示,在 3D 视图中显示3个 Emit 算子生成的坐标和 Measurement 算子的夹角。
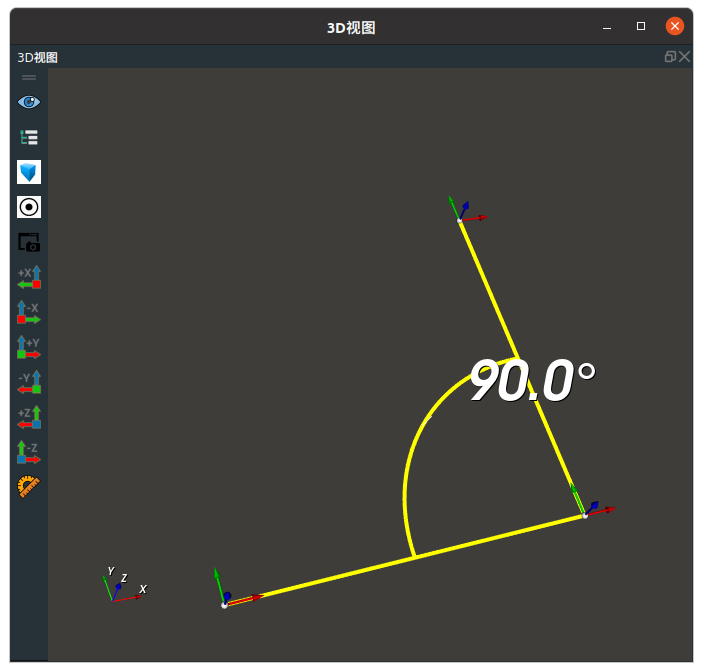
双击 Measurement 算子角度值输出端口,在调试面板中显示 3 个坐标的角度值。