Transform 元素空间变换
Transform 算子用于元素空间变换,适用于 Pose 、Cube 、PointCloud 。
| type | 功能 |
|---|---|
| Pose | pose 空间变换。 |
| Cube | 立方体空间变化。 |
| PointCloud | 点云空间变换。 |
Pose
将 Transform 算子的 类型 属性选择 Pose ,用于 pose 空间变换。Pose 以算子左侧输入端口 base 坐标为基础坐标系,平移旋转 relative 的量。 relative 矩阵左乘 base 矩阵所得到的矩阵即为 transform 所得 pose 的矩阵。
算子参数
倒置/invert:True:输出空间变换后的逆 pose 。False:输出空间变换后 pose 。
转换后坐标/transformed:设置空间变换后的 pose 在 3D 视图中的可视化属性。 打开 pose 可视化。
打开 pose 可视化。 关闭 pose 可视化。
关闭 pose 可视化。 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
转换后坐标列表/transformed_list:设置空间变换后的 pose 列表在 3D 视图中的可视化属性。值描述与 transformed 一致。
数据信号输入输出
输入:
说明
base / base_list 端口和 relative / relative_list 端口连接时,单个 base 可以和单个 relative 连接,也可以和 relative_list 连接。只需要连接两个端口即可。
base:数据类型:Pose
输入内容:需要变换的坐标
relative:数据类型:Pose
输入内容:相对坐标
base_list:数据类型:PoseList
输入内容:需要变换的坐标列表
relative_list:数据类型:PoseList
输入内容:相对坐标列表
输出:
transformed:数据类型:Pose
输出内容:变换后坐标数据
transformed_list:数据类型:PoseList
输出内容:变换后坐标列表数据
功能演示
使用 Transform 算子中将 Emit 生成的 pose 与 Emit_1 生成的 pose 二者进行空间转换。
步骤1:算子准备
添加 Trigger 、Emit 、Emit(2个) 、Transform 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → Pose
坐标 → 0.2 0 0 0 0 0
坐标 →
可视
设置Emit _1算子参数:
类型 → Pose
坐标 → 0 0 0 0 1.5708 0
坐标 →
可视
设置 Transform 算子参数:
类型 → Pose
转换后坐标 →
可视
步骤3:连接算子
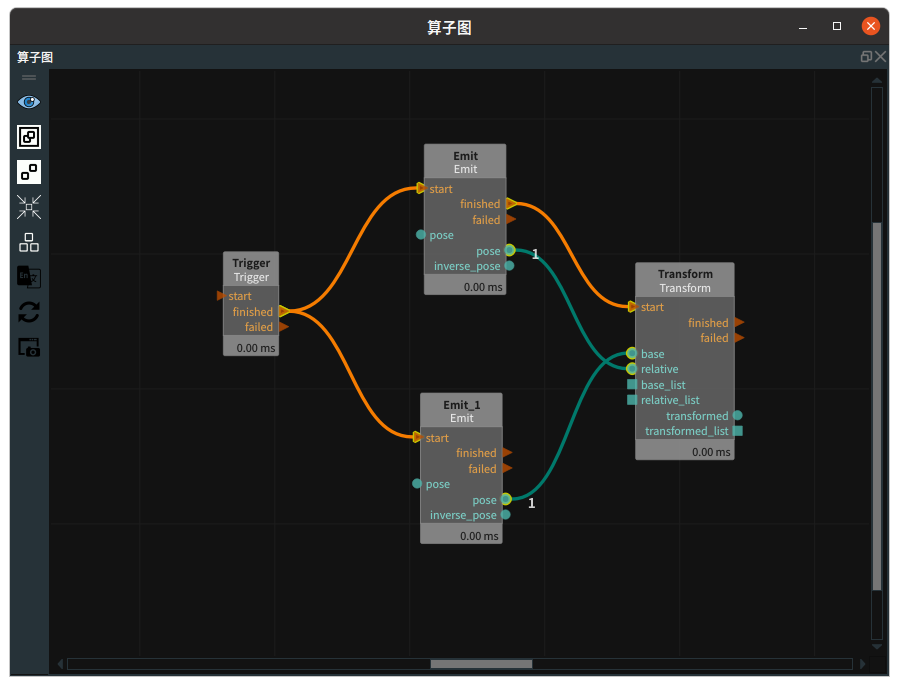
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
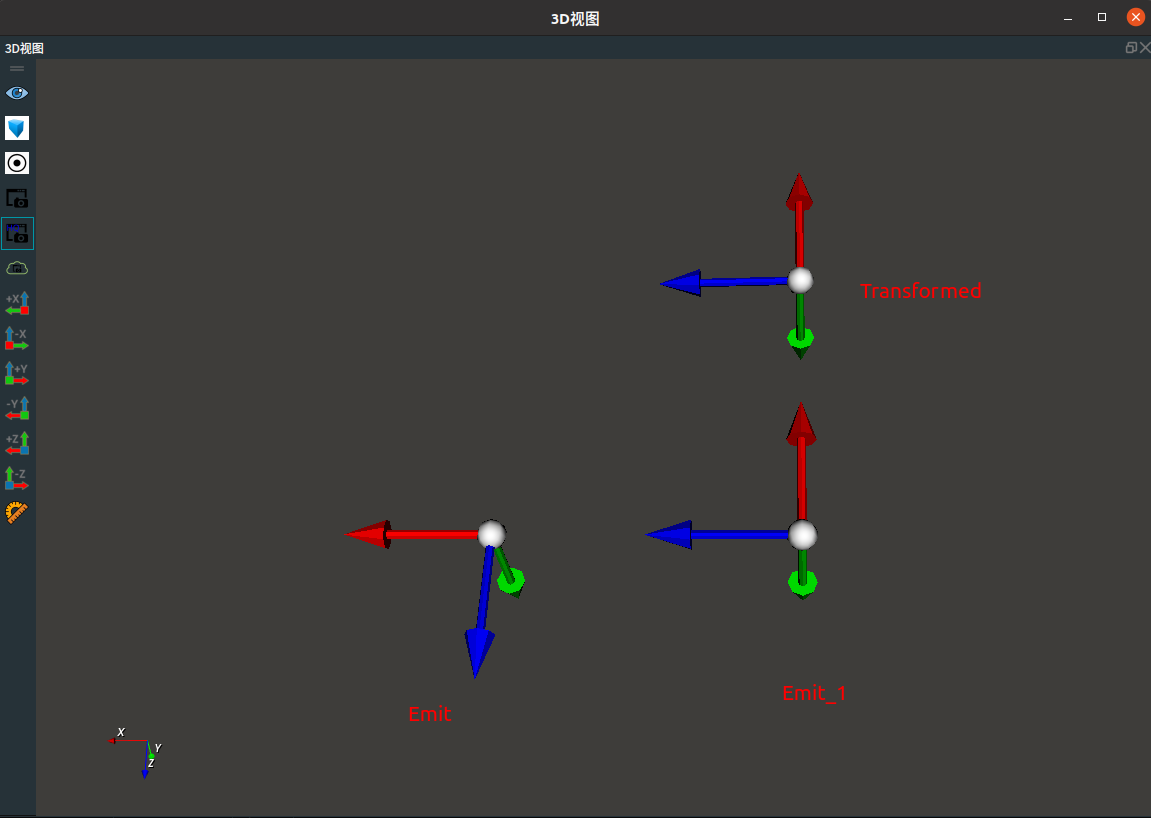
运行结果
如下图所示,在 3D 视图中显示 Emit 和 Emit_1 结果和 Transformed 结果,其为 Emit 生成的 pose 与 Emit_1 生成的 pose ,前者矩阵左乘后者矩阵所得到的矩阵即为 transform 所得 pose 的矩阵。
Cube
将 Transform 算子的 类型 属性选择 Cube ,用于立方体空间变换。其变换的原理是以 Cube 的中心点 pose 为基础进行变换。
算子参数
倒置/invert:True:输出空间变换后的逆 pose 。False:输出空间变换后 pose 。
模式/mode:设置 cube 位姿的模式。cube_base:将 cube 位姿作为变换的坐标。cube_relative:将 cube 位姿作为相对的坐标。
立方体/cube:设置空间变换后的 cube 在3D视图中的可视化属性。- 打开立方体可视化 。
- 关闭立方体可视化 。
 设置 3D 视图中立方体的颜色。取值范围:[-2,360] 。默认值:-2 。
设置 3D 视图中立方体的颜色。取值范围:[-2,360] 。默认值:-2 。 设置立方体的透明度。取值范围:[0,1] 。默认值:0.5
设置立方体的透明度。取值范围:[0,1] 。默认值:0.5
坐标/pose:设置变换后立方体中心点 pose 在 3D 视图中的可视化属性。- 打开立方体中心点 pose 可视化。
- 关闭立方体中心点 pose 可视化。
- 设置立方体中心点 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
立方体列表/cube_list:设置 cube_list 的可视化属性,值描述与上述立方体一致。坐标列表/pose_list:设置空间变换后的 pose 列表可视化属性。值描述与坐标一致。
数据信号输入输出
说明
数据输入内容与属性面板中的 mode 模式相关。
输入:
cube:数据类型:Cube
输入内容:当模式为 cube_base 时为变换的 cube,当模式为 cube_relative 时为相对的 cube
cube_list:数据类型:Cube
输入内容:当模式为 cube_base 时为变换的 cubelist,当模式为 cube_relative 时为相对的 cubelist
pose:数据类型:Pose
输入内容:当模式为 cube_base 时为相对的 pose,当模式为 cube_relative 时为变换的 pose
pose_list:数据类型:PoseList
输入内容:当模式为 cube_base 时为相对的 poselist,当模式为 cube_relative 时为变换的 poselist
输出:
cube:数据类型:Cube
输出内容:变换后立方体数据
cube_list:数据类型:CubeList
输出内容:变换后立方体列表数据
pose:数据类型:Pose
输出内容:变换后立方体中心点坐标
pose_list:数据类型:PoseList
输出内容:变换后立方体中心点坐标列表
功能演示
使用 Transform 算子中 Cube 将加载的立方体进行空间变换。
步骤1:算子准备
添加 Trigger 、Emit、Load 、Transform 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → Cube
文件 →
 → 选择立方体文件名 ( example_data/cube/cube.txt )
→ 选择立方体文件名 ( example_data/cube/cube.txt )立方体 →
可视
设置Emit 算子参数:
类型 → Pose
坐标 → 1 0 0 1.57 3.14 0
坐标 →
可视 → 1
设置 Transform 算子参数:
类型 → Cube
模式 → cube_base
立方体 →
可视 → 120
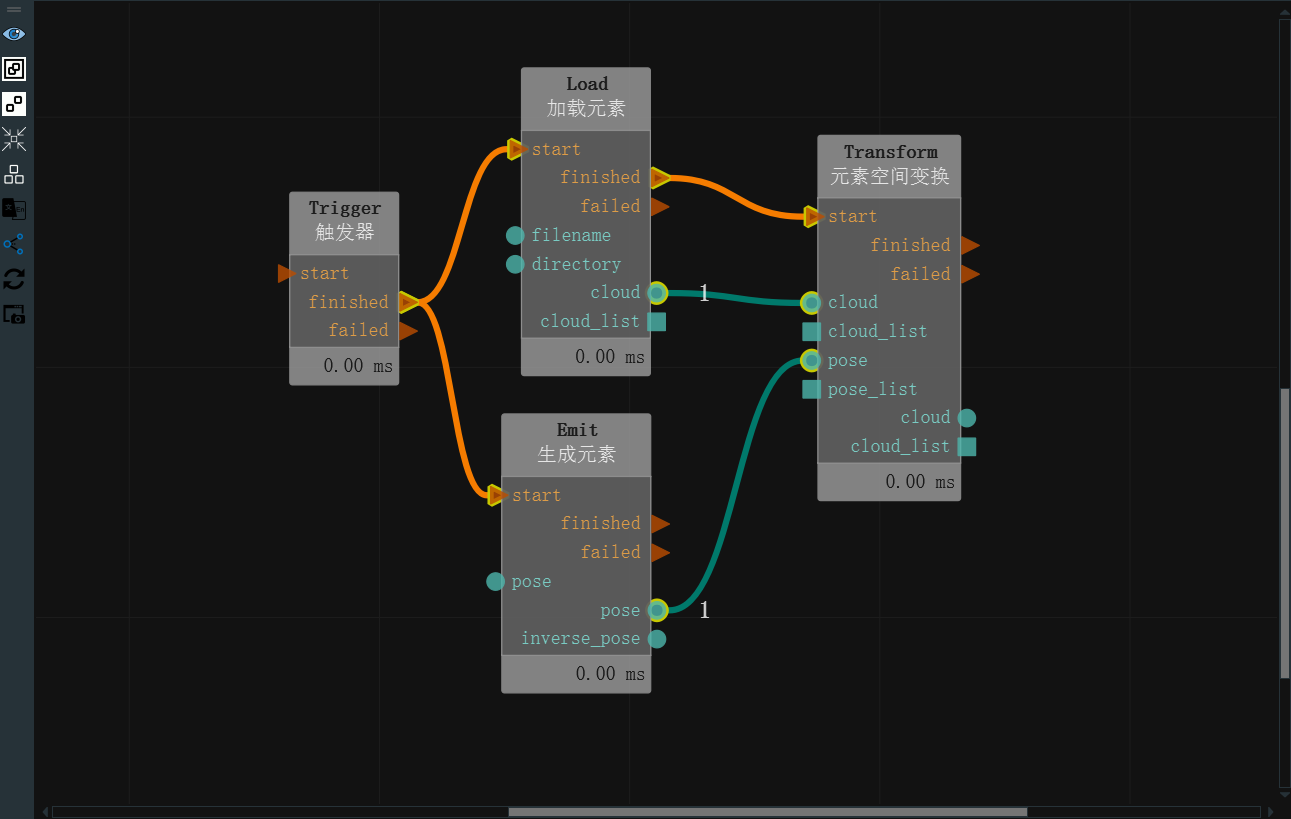
步骤3:连接算子
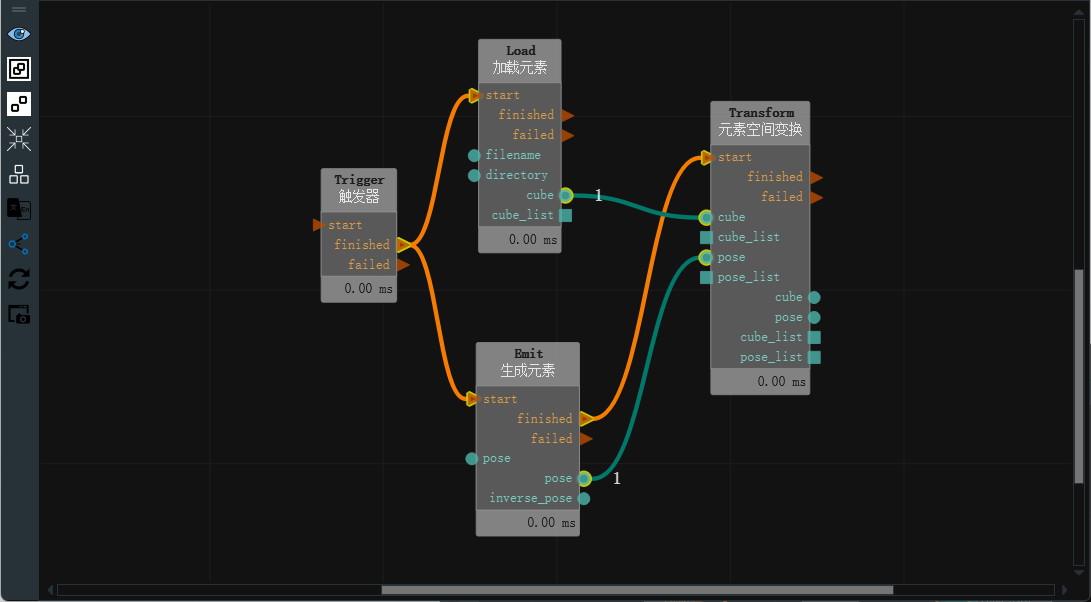
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
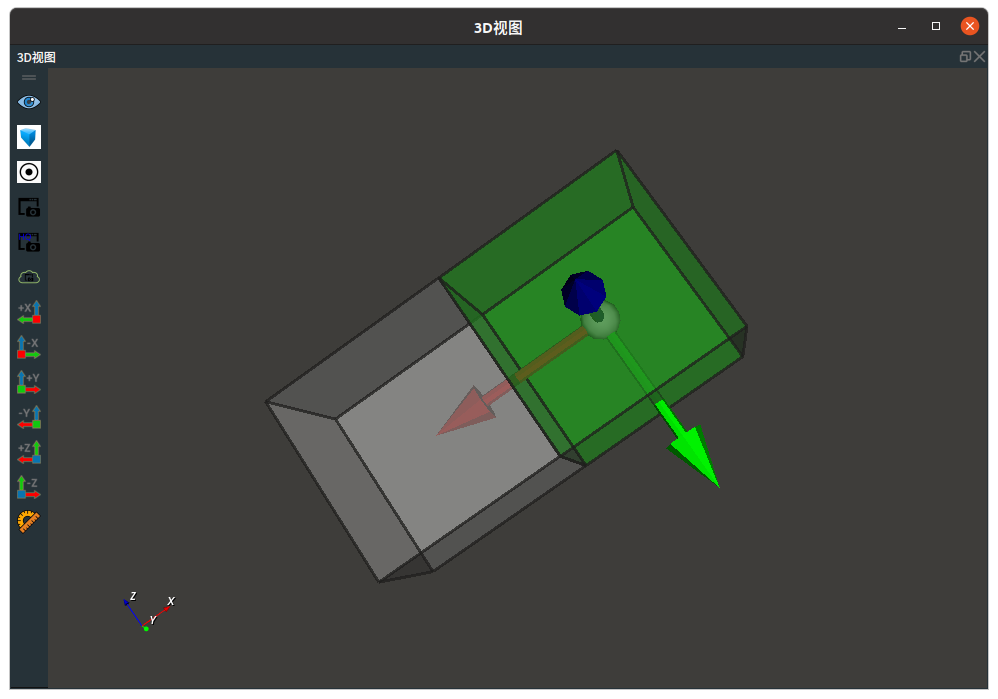
如下图所示,3D 视图中分别显示 cube 转换前后的对比图,灰色立方体为 Load 算子加载的 cube ,绿色立方体为 Transform 算子转换后的 cube 。pose 为 Emit 算子生成的 pose 。
PointCloud
将 Transform 算子的 类型 属性选择 PointCloud ,用于点云空间变换。其变换的原理是以点云的中心点 pose 为基础进行变换。
算子参数
点云/cloud:设置空间变换后的点云在 3D 视图中的可视化属性。- 打开点云可视化。
- 关闭点云可视化。
- 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
点云列表/cloud_list:设置点云列表在 3D 视图中的可视化属性。值描述与点云一致。
数据信号输入输出
输入:
cloud:数据类型:PointCloud
输入内容:需要变换的点云数据
cloud_list:数据类型:CloudList
输入内容:需要变换的点云列表数据
pose:数据类型:Pose
输入内容:相对坐标数据
pose_list:数据类型:PoseList
输入内容:相对坐标列表数据
输出:
cloud:数据类型:PointCloud
输出内容:变换后点云数据
cloud_list:数据类型:PointCloudList
输出内容:变换后点云列表数据
功能演示
使用 Transform 算子中 PointCloud 将加载的点云进行空间变换。
步骤1:算子准备
添加 Trigger 、Load、Emit 、Transform 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → pointcloud
文件 →
→ 选择点云文件名( example_data/pointcloud/wolf1.pcd )坐标 →
可视 → 280
设置Emit 算子参数:
类型 → Pose
坐标 → 1 2 0 1.57 3.14 0
坐标 →
可视 → 10
设置 Transform 算子参数:
类型 → PointCloud
点云 →
可视 → 60
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
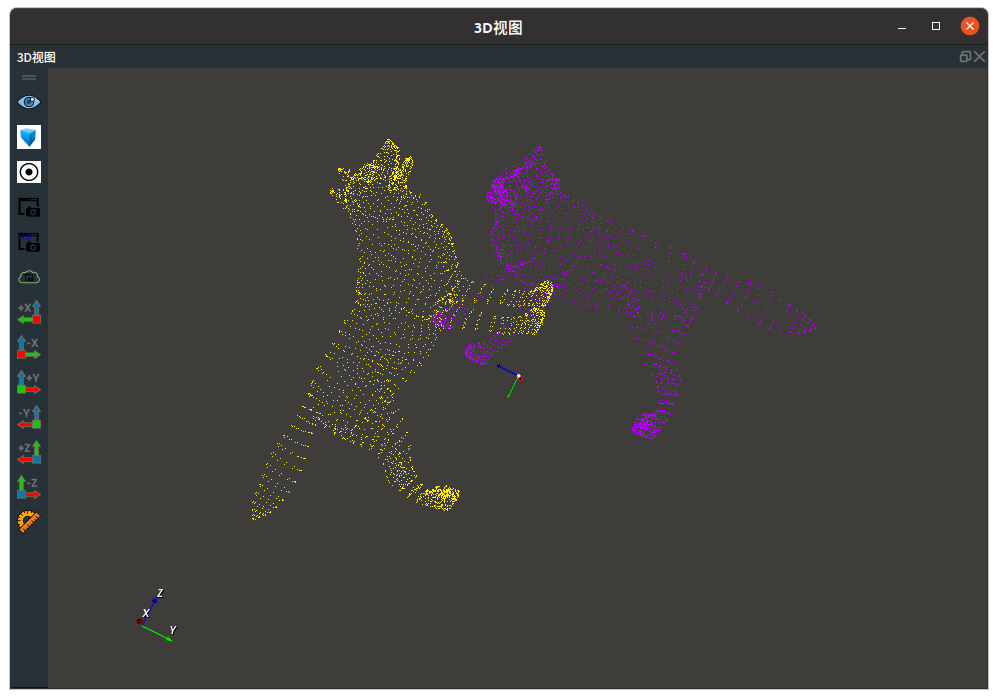
运行结果
如下图所示,3D 视图中分别显示点云转换前后的对比图,紫色点云为 Load 算子加载的点云,黄色点云为 Transform 算子转换后的点云,pose 为 Emit 算子生成的 pose。