GeometryProbe 几何探测
GeometryProbe 算子用于在原始点云的指定区域中筛选出符合要求的轮廓点云。
| type | 功能 |
|---|---|
| Line | 将原始点云在给定的旋转立方体内裁剪,并沿着立方体的某个指定轴方向进行线性轮廓探测。 |
| Circle | 根据原始点云以及初始圆心的位置,探测内圆或者外圆轮廓点云。 |
Line
将 GeometryProbe 算子的 类型 设置为 Line ,用于将原始点云在给定的旋转立方体内裁剪,并沿着立方体的某个指定轴方向进行线性轮廓探测。
算子参数
探测方向/probe_direction:探测方向。包含 “x+” , “x-” , “y+” , “y-” , “z+” , “z-” 六个选项。例如,”x+” 代表沿着 ref_cube 的 x 正轴方向,从 ref_cube 的外面朝向里面进行探测。圆锥体顶角度/circular_cone_angle:排除锥的角度,一般保持默认的45度角即可。以原始点云在裁剪区域内的某个点为顶点,以上述探测方向作为轴线方向,根据该锥角可以在空间作一个圆锥,被该圆锥囊括的所有其他点会被排除,之后遍历其他点重复迭代,通俗的理解为切割出圆锥以外的点云进行处理。有效点百分比数/valid_points_percentage:有效点云比例。即对裁剪后的点云进行预排除时的保留比例。步进值/step_value:根据排除锥进行排除迭代运算时的步长 。一般保持默认即可。该值一般对效率有所影响,不会影响精度。有效点云/valid_cloud:设置裁剪后的点云在 3D 视图中的可视化属性。线段点云/line_cloud:设置最终的线性轮廓点云在 3D 视图中的可视化属性。 打开线性轮廓点云可视化。
打开线性轮廓点云可视化。 关闭线性轮廓点云可视化。
关闭线性轮廓点云可视化。 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入端口
输入:
cloud:数据类型:PointCloud
输入内容:点云原始点云
ref_cube:数据类型:Cube
输入内容:参照立方体
输出:
crop_cloud:数据类型:PointCloud
输出内容:原始点云裁剪后的点云
line_cloud:数据类型:PointCloud
输出内容:根据裁剪点云进行探测获得的线性轮廓点云
功能演示
使用 GeometryProbe 算子中 Line 将加载点云在给定的旋转立方体内裁剪,并沿着立方体的某个指定轴方向进行线性轮廓探测。
步骤1:算子准备
添加 Trigger 、Load 、Emit 、GeometryProbe(2个) 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → cube
坐标 → 0.199179 0.26519 0.092586 2.61142 -2.82994 3.07943
宽度 → 0.02
高度 → 0.01
深度 → 0.005
立方体 →
可视坐标 →
可视
设置 Load 算子参数:
类型 → PointCloud
文件 →
 → 选择点云文件名( example_data/pointcloud/cloud.pcd )
→ 选择点云文件名( example_data/pointcloud/cloud.pcd )点云 →
可视
设置 GeometryProbe 算子参数
类型 → Line
探测方向 → y-
圆锥体顶角度 → 45
有效点百分比数 → 10
步进值 → 5
有效点云 →
可视线段点云 →
可视
设置GeometryProbe_1算子参数
类型 → Line
探测方向 → x-
圆锥体顶角度 → 45
有效点百分比数 → 10
步进值 → 5
有效点云 →
可视线段点云→
可视
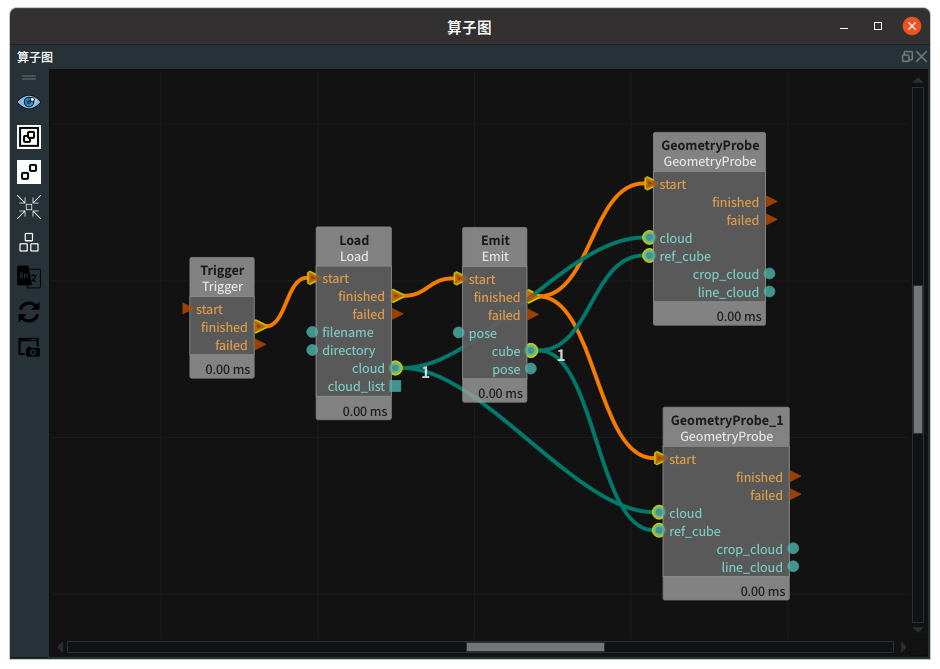
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
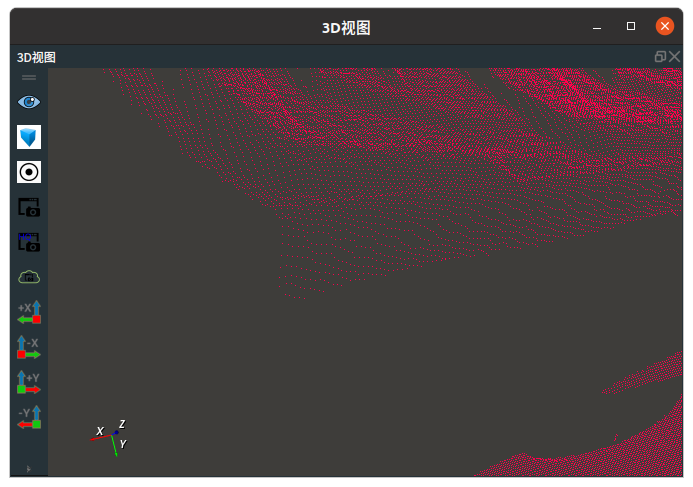
如下图所示,可见到点云(局部)显示如下 。
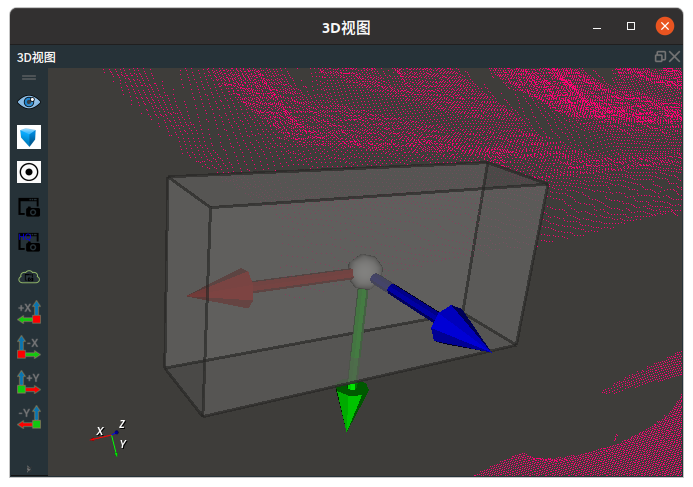
打开Emit算子的cube可视化,第二次运行 trigger 算子,并调整 cube 的长宽高以及轴向,生成的 Cube( 红色轴为 x,绿色轴为 y,蓝色轴为 z )如下所示。
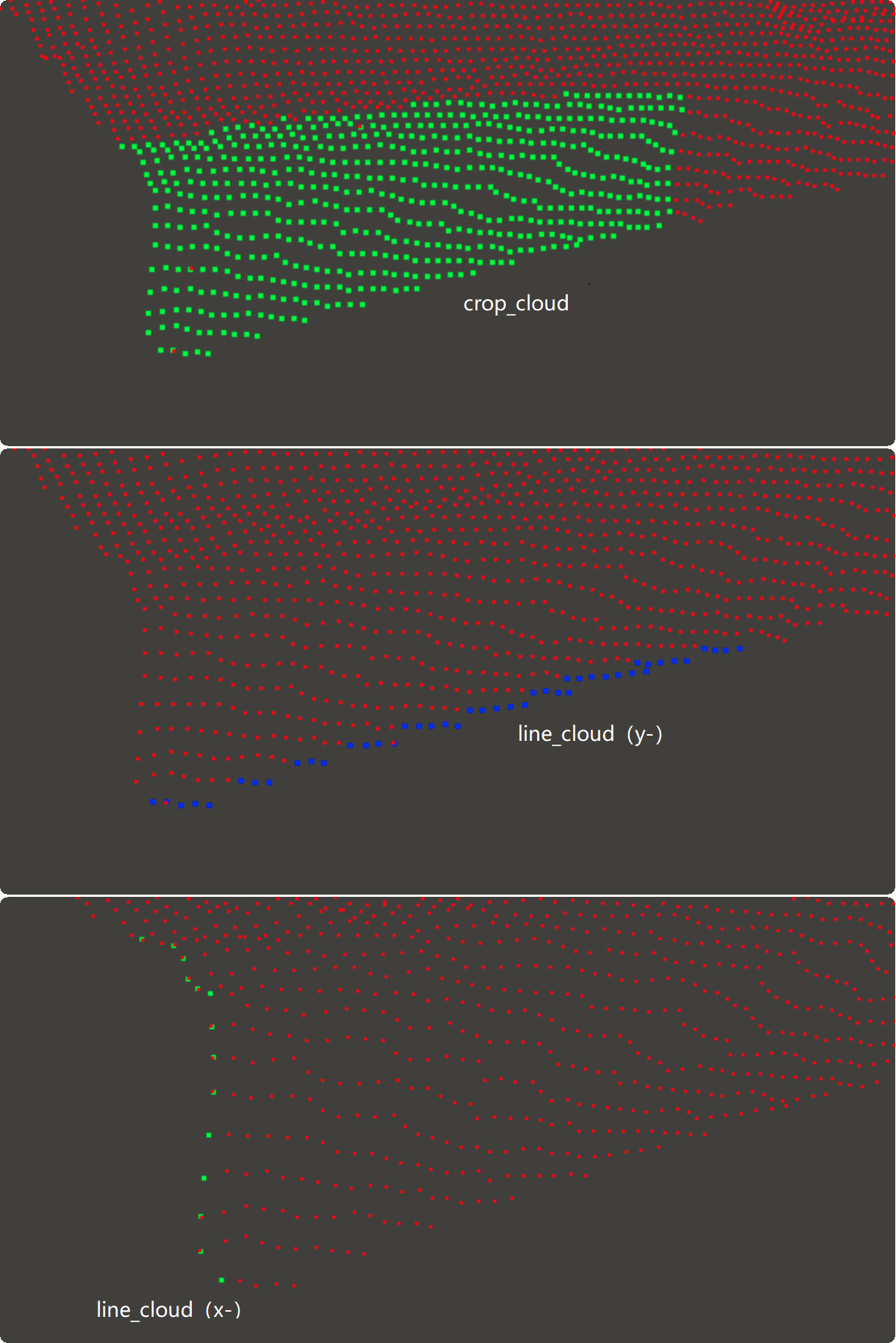
最后更改两个 GeometryProbe 算子的 probe_direction 属性,分别探测 y 轴负方向以及x轴负方向的线性轮廓,两者共同的 crop_cloud 的显示效果以及两者分别的点云探测结果如下。
Circle
将 GeometryProbe 算子的 类型 设置为 Circle ,用于根据原始点云以及初始圆心的位置,探测内圆或者外圆轮廓。
算子参数
探测方向/probe_direction:探测方向。external:代表从点云外面朝向预估圆心的方向探测外圆轮廓。
internal:代表从点云内部朝向预估圆心的方向探测内圆轮廓。
圆锥体顶角度/circular_cone_angle:排除锥的角度,一般保持默认的45度角即可。” external “ 模式下,以有效点云的某个点为顶点,同预估圆心的连线作为轴线终点,根据该锥角可以在空间作一个圆锥,被该圆锥囊括的所有其他点会被排除,之后遍历其他点重复迭代;” internal “ 模式下,顶点改为预估圆心,轴线终点改为有效点云的某个点。有效点百分比数/valid_points_percentage:有效点百分比数。步进值/step_value:根据排除锥进行排除迭代运算时的步长,一般保持默认即可,该值一般对效率有所影响,不会影响精度。有效点云/valid_cloud:对预处理后的有效点云进行显示控制,默认为关闭状态,参数介绍如下所示。圆圈点云/circle_cloud:对最终圆形轮廓点云进行显示控制。- 打开最终圆形轮廓点云可视化。
- 关闭最终圆形轮廓点云可视化。
- 设置 3D 视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
- 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入端口
输入:
cloud:数据类型:PointCloud
输入内容:点云原始点云
initial_pose:数据类型:Pose
输入内容:原始点云的圆心位置估计,实际仅使用 Pose 的 xyz 三个数值
输出:
valid_cloud:数据类型:PointCloud
输出内容:原始点云预处理后保留的有效点云
circle_cloud:数据类型:PointCloud
输出内容:根据有效点云进行探测获得的圆形轮廓点云
功能演示
使用 GeometryProbe 算子中 Circle ,用于根据加载点云以及初始圆心的位置,探测内圆或者外圆轮廓点云。
步骤1:算子准备
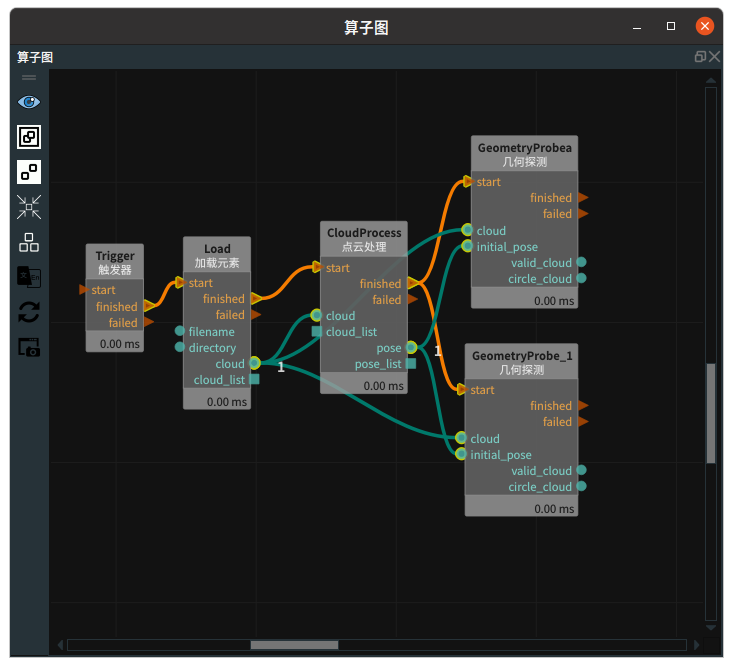
添加 Trigger 、Load 、CloudProcess、GeometryProbe (2个)算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → pointcloud
文件 →
→ 选择点云文件名( example_data/pointcloud/circle_crop.pcd )点云 →
可视
设置 GeometryProbe 算子参数:
类型 → Circle
探测方向 → external
圆锥体顶角度 → 70
有效点百分比数 → 5
步进值 → 5
圆圈点云→
可视
设置GeometryProbe_1算子参数:
类型 → Circle
探测方向 → internal
圆锥体顶角度 → 45
有效点百分比数 → 5
步进值 → 5
圆圈点云→
可视
设置 CloudProcess 算子参数:
类型 → CloudCentroid
坐标→
可视
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
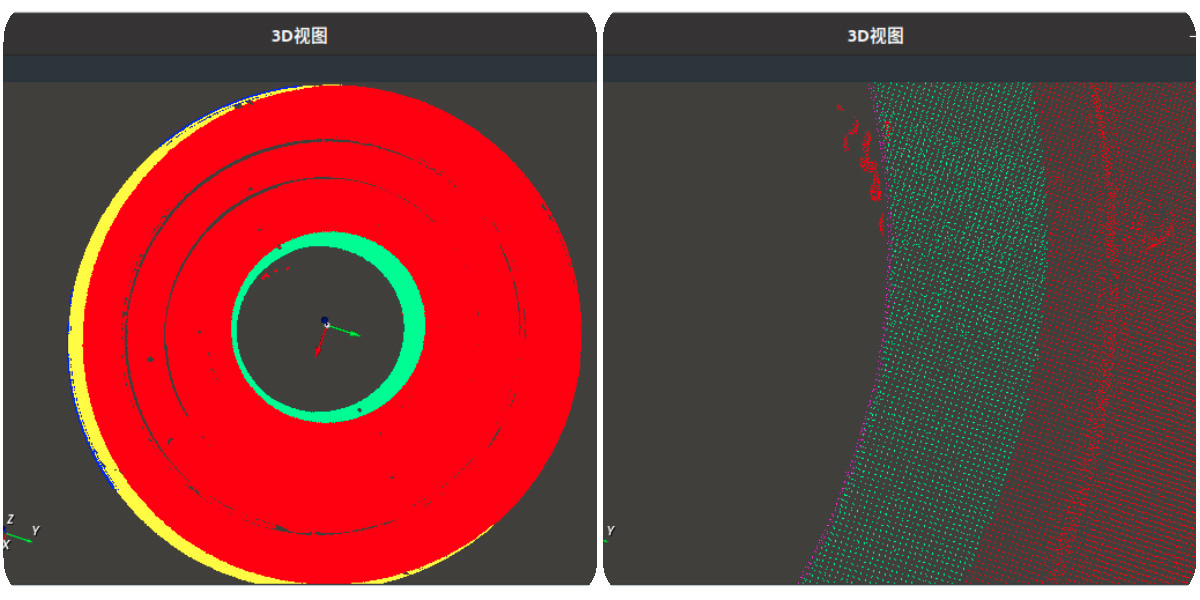
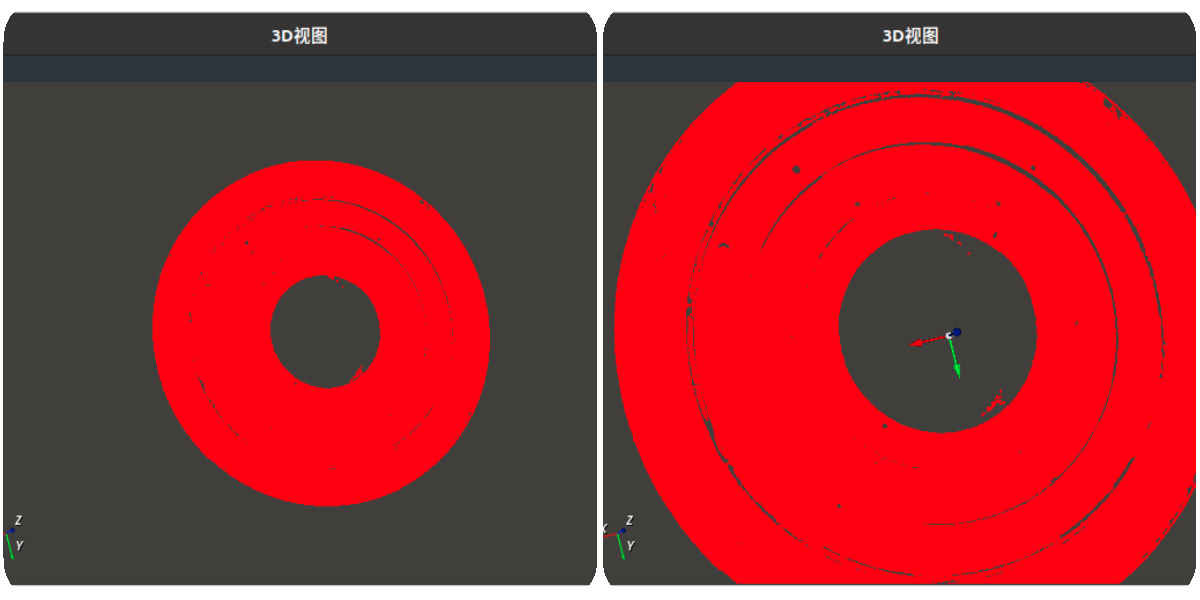
3D 视图中显示如下。左图为 Load 算子的点云可视化,右图为 CloudProcess 算子的pose可视化。
后续运行效果示意图,分别展示如下:
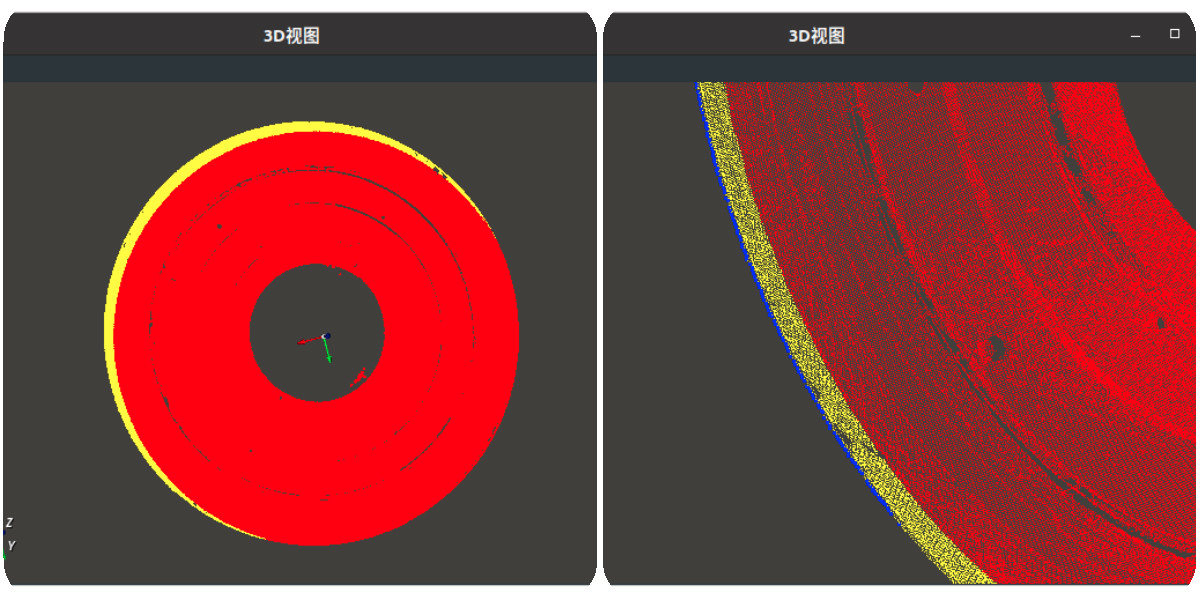
左图:打开 GeometryProbe 算子( external 模式)的 valid_cloud 的可视化选项,右图:打开 GeometryProbe 算子( external 模式)的 circle_cloud 的可视化选项的局部放大图。
左图:打开 GeometryProbe 算子( internal 模式)的 valid_cloud 的可视化选项。右图:打开 GeometryProbe 算子 ( internal 模式) 的 circle_cloud 的可视化选项的局部放大图。