MinimumBoundingBox 最小包围立方体
MinimumBoundingBox 算子用于根据目标上表面点云来获取点云的最小立方体包围框,常用于箱包等物体的姿态定位。
| type | 功能 |
|---|---|
| 快速 | 获取点云的最小立方体包围框,与 ApproxMVBB 功能类似。推荐使用 SimpleMVBB,运算速度更快。 |
| 标准 | 获取点云的最小立方体包围框。本算子与 SimpleMVBB 算子功能一致,不再进行介绍。 |
MinimumBoundingBox 算子用于根据目标上表面点云来获取点云的最小立方体包围框,常用于箱包等物体的姿态定位。
算子参数
模式:指定计算最小包围框的模式。使用参照坐标:使用参照坐标系来计算最小包围框。X>Y>Z:按照 X、Y、Z 轴的顺序来计算最小包围框。
模式→使用参照坐标:
采样点数:指定用于计算最小包围框的采样点数。RX参考值:指定 X 轴方向的参考值,从以下角度中选择最接近的值:0、-90、90、-180/180。
模式→X>Y>Z:
采样点数:指定用于计算最小包围框的采样点数。Z轴朝向:指定 Z 轴朝向。世界坐标系 Z 轴正向:Z 轴朝向世界坐标系的正方向。
世界坐标系 Z 轴负向:Z 轴朝向世界坐标系的负方向。
X轴朝向:世界坐标系 X 轴正向:X 轴朝向世界坐标系的正方向。
世界坐标系 X 轴负向:X 轴朝向世界坐标系的负方向。
世界坐标系 Y 轴正向:X 轴朝向世界坐标系的 Y 轴正方向。
世界坐标系 Y 轴负向:X 轴朝向世界坐标系的 Y 轴负方向。
RX参考值:指定 X 轴方向的参考值,从以下角度中选择最接近的值:0、-90、90、-180/180。包围立方体/box:设置包围框在 3D 视图中的可视化属性。 打开包围框可视化。
打开包围框可视化。 关闭包围框可视化 。
关闭包围框可视化 。 设置 3D 视图中包围框的颜色。取值范围:[-2,360] 。默认值:-1 。
设置 3D 视图中包围框的颜色。取值范围:[-2,360] 。默认值:-1 。 设置包围框的透明度。取值范围:[0,1] 。默认值:0.5 。
设置包围框的透明度。取值范围:[0,1] 。默认值:0.5 。
包围立方体中心坐标/box_pose:设置包围框中心点 pose 在 3D 视图中的可视化属性。- 打开包围框中心点 pose 可视化。
- 关闭包围框中心点 pose 可视化。
 设置包围框中心点 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
设置包围框中心点 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
包围立方体列表/box_list:设置包围框列表在 3D 视图中的可视化属性。 值描述与包围立方体一致。包围立方体列表中心坐标/box_pose_list:设置包围框中心点 pose 列表在 3D 视图中的可视化属性。 值描述与包围立方体中心坐标一致。
数据信号输入输出
输入:
说明
根据需求选择点云或者点云列表其中一种数据信号输入即可。
点云:数据类型:PointCloud
输入内容:点云数据
点云列表:数据类型:PointCloudLIst
输入内容:点云数据列表
参考坐标:数据类型:Pose
输入内容:参照 pose 数据
说明
当连接参考坐标,结果包围立方体则会参照算子左侧的参考坐标端口输入的 pose 姿态进行 Height - Width - Depth 同 X Y Z 的匹配。如果该端口不连接数据,则 Height - Width - Depth 同 X Y Z 的匹配是随机的。一般我们选择连接该参数,并且给参考坐标端口输入 Pose(0,0,0,0,0,0) 即可。
输出:
包围立方体:数据类型:Cube
输出内容:最小立方体包围框
包围立方体中心坐标:数据类型:Pose
输出内容:最小立方体包围框 pose 数据
包围立方体列表:数据类型:Cubelist
输出内容:最小立方体包围框列表
包围立方体列表中心坐标:数据类型:Poselist
输出内容:最小立方体包围框 pose 列表数据
功能演示
使用 MinimumBoundingBox 获取加载点云的最小立方体包围框,并根据生成的原点 pose 进行姿态匹配。
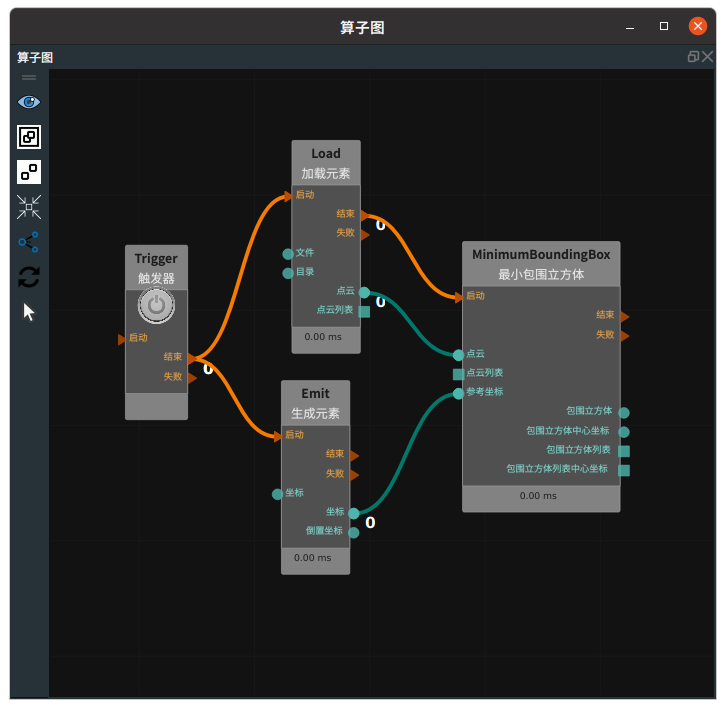
步骤1:算子准备
添加 Trigger 、Load 、Emit 、MinimumBoundingBox 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
 → 选择点云文件名( example_data/pointcloud/model.pcd )
→ 选择点云文件名( example_data/pointcloud/model.pcd )点云 →
可视
设置 Emit 算子参数:
类型 → 坐标
坐标 → 0 0 0 0 0 0
坐标 →
可视
设置 MinimumBoundingBox 算子参数:
类型 → 标准
模式 → 使用参照坐标
包围立方体 →
可视包围立方体中心坐标 →
可视
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
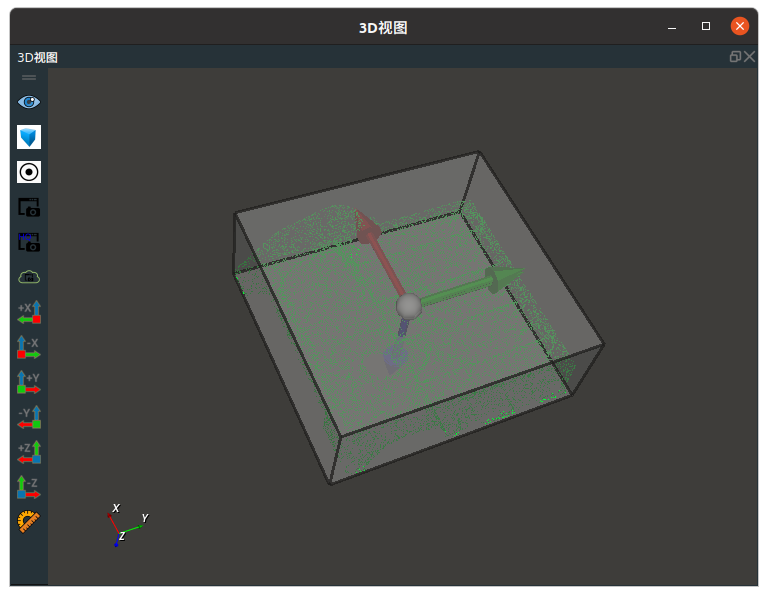
运行结果
结果如下图所示,在 3D 视图中加载的点云以及 MinimumBoundingBox 的结果。最小包围框 Cube 和中心点 pose 。