GenerateTrajectory 生成轨迹
GenerateTrajectory 算子用于生成轨迹
| 类型 | 功能 |
|---|---|
| 固定姿态生成 | 根据固定的姿态生成轨迹 |
| 按法向量生成 | 根据法向量生成轨迹 |
固定姿态生成
将 GenerateTrajectory 算子的 类型 设置为固定姿态生成 ,用于根据固定的姿态生成轨迹。
算子参数
间隔:轨迹点之间的间隔距离。该参数决定了生成轨迹点的密度。轨迹扩张:用于扩展轨迹的参数。该参数可以控制轨迹的扩展程度。轨迹线性度:用于控制轨迹的线性度。该参数决定了轨迹的平滑程度。坐标列表/pose_list:设置坐标列表在 3D 视图中的可视化属性。 打开坐标列表可视化。
打开坐标列表可视化。 关闭坐标列表可视化。
关闭坐标列表可视化。 设置坐标列表的尺寸大小。取值范围:[ 0.001,10] 。默认值:0.1 。
设置坐标列表的尺寸大小。取值范围:[ 0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
点云:数据类型:PointCloud
输入内容:点云
参考坐标:数据类型:Pose
输入内容:参考坐标
输出:
坐标列表:数据类型:PoseList
输出内容:轨迹坐标列表数据
功能演示
使用 GenerateTrajectory 算子中 类型 属性 固定姿态生成 将加载点云根据原点坐标(0 0 0 0 0 0)生成轨迹。
步骤1:算子准备
添加 Trigger 、Load 、Emit、GenerateTrajectory 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 点云
文件 →
 →选择点云文件名( example_data/pointcloud/circle_line.pcd )
→选择点云文件名( example_data/pointcloud/circle_line.pcd )点云 →
可视
设置 Emit 算子参数:
类型 → 坐标
坐标 →
可视
设置 GenerateTrajectory 算子参数:
类型 → 按固定姿态生成
间隔 → 0.1
轨迹扩张 → 0
轨迹线性度 → 0.002
坐标列表 →
可视
步骤3:连接算子
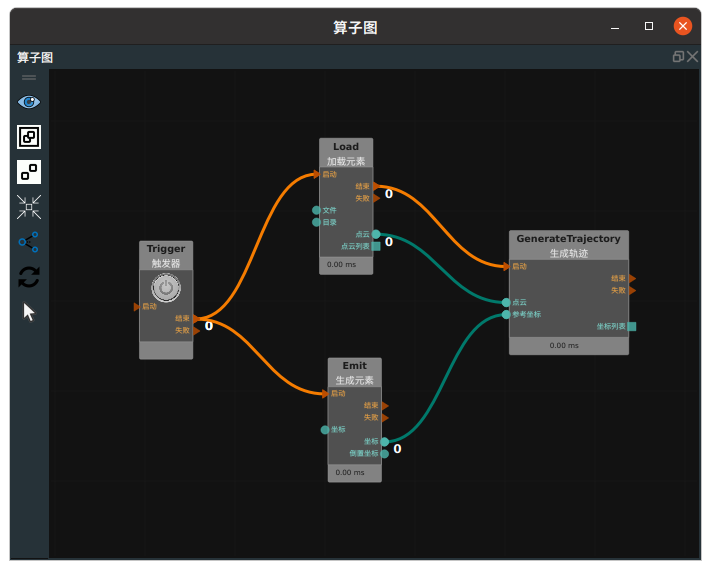
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
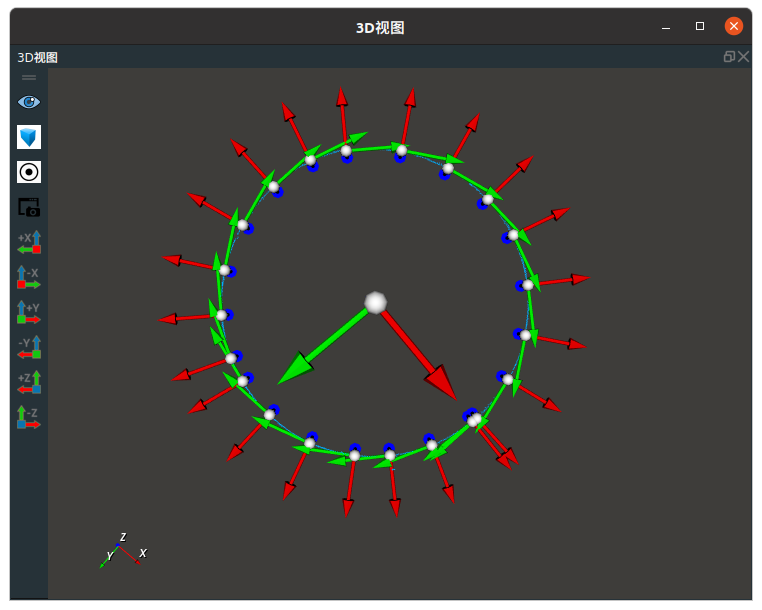
如下图所示,3D 视图中显示 Load 算子加载的点云以及生成的轨迹坐标列表。
按法向量生成
将 GenerateTrajectory 算子的 类型 设置为按法向量生成 ,用于根据根据法向量生成轨迹。
算子参数
间隔:轨迹点之间的间隔距离。该参数决定了生成轨迹点的密度。轨迹扩张:用于扩展轨迹的参数。该参数可以控制轨迹的扩展程度。轨迹线性度:用于控制轨迹的线性度。该参数决定了轨迹的平滑程度。坐标列表/pose_list:设置坐标列表在 3D 视图中的可视化属性。- 打开坐标列表可视化。
- 关闭坐标列表可视化。
- 设置坐标列表的尺寸大小。取值范围:[ 0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
点云:数据类型:PointCloud
输入内容:点云
参考坐标:数据类型:Pose
输入内容:参考坐标
输出:
坐标列表:数据类型:PoseList
输出内容:轨迹坐标列表数据
功能演示
算子连接与固定姿态生成类型一致,请参考进行算子连接。
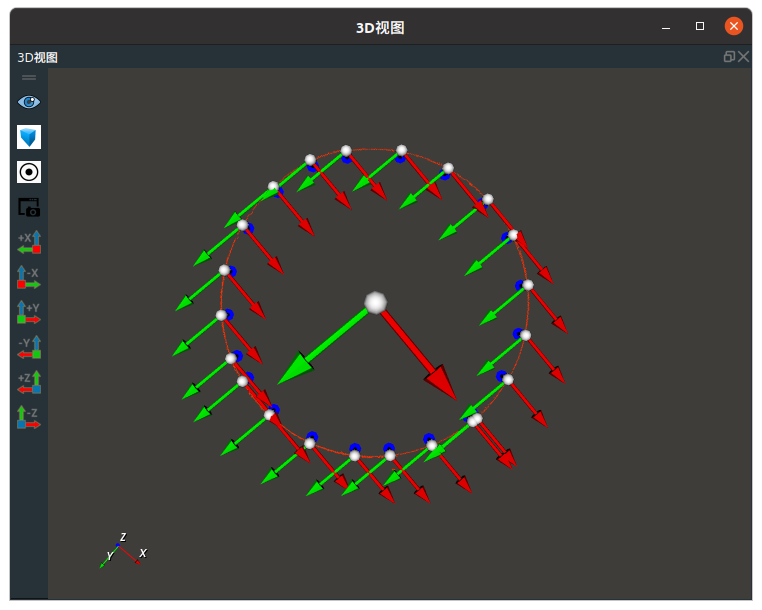
下图为运行结果: