C++ (Windows)
示例程序简介
C++ 示例程序位于 VcameraSDK-X.X.X/cpp/example,包含:
ConnectByIpAddress.cpp:使用 IP 地址打开网络相机。DepthToPointCloud.cpp:设置相机工作在连续采集模式下,将深度图实时转换为点云数据。ImageRegistration.cpp:设置相机工作在软触发模式,将输出的深度图与彩色图对齐。DumpAllFeatures.cpp:列举相机支持的属性。DumpDeviceInfo.cpp:列举相机的信息。FetchFrame.cpp:设置相机工作在连续采集模式下采集深度图。FullExample1.cpp:设置相机工作在软触发模式,将深度数据实时转换为三维点云。ListDevices.cpp:列举所有连接到电脑上的相机。LoadFeaturesFromFile.cpp:从指定 JSON 文件加载相机参数配置并应用到相机。LoadFeaturesFromStorage.cpp:从 Storage 区中加载参数配置并应用到相机。该示例程序仅适用于 Gige_2.0 相机(不支持用户配置的相机)。LogConfig.cpp:配置 Vcamera SDK 软件日志系统。ReadCalibInfo.cpp:读取指定传感器的标定参数。ReadWriteFeatures.cpp:示范如何对相机属性进行读、写操作。SaveFeaturesToFile.cpp:将修改后的参数配置保存到指定 JSON 文件。SaveFeaturesToStorage.cpp:将参数配置保存到设备存储 Storage 区。该示例程序仅适用于 Gige_2.0 相机(不支持用户配置的相机)。SetIpAddress.cpp:设置静态 IP 地址。SetUndistortion.cpp:设置相机工作在软触发模式。当相机接收到软触发指令时,将采集并输出经过畸变校正的左灰度图和彩色图。所有输出图像将自动保存至可执行文件同级目录。SoftTrigger.cpp:设置相机工作在软触发模式,相机收到软触发指令后采集并输出深度图。UserSetSelector.cpp:选择用户配置。该示例程序仅适用于 Gige_2.1 相机。
安装依赖
安装依赖1———CMake
备注
推荐安装 CMake 3.25 版本(此版本经测试 100% 兼容支持,其他版本未经测试,不保证兼容性)。
在 CMake 官网 下载 Windows 安装包。
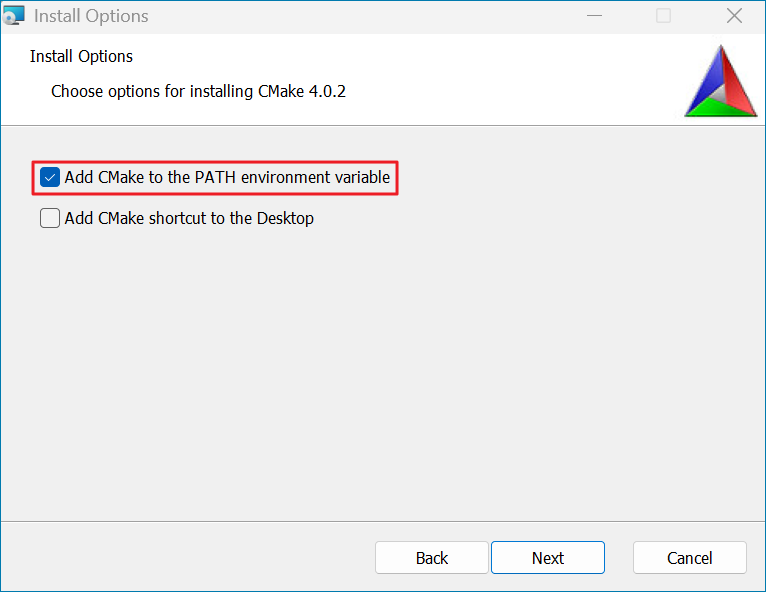
双击下载的
.msi文件,按照提示完成安装。在安装过程中,勾选 “Add CMake to PATH”,将 CMake 添加到系统环境变量。
CMake 环境配置
打开命令提示符(cmd),输入以下命令,验证安装是否成功,若显示版本号,则安装成功。
cmake --version
安装依赖2———Visual Studio
备注
推荐安装 Visual Studio 2022 版本(此版本经测试 100% 兼容支持,其他版本未经测试,不保证兼容性)。
下载并安装 Visual Studio 。请勾选 “桌面应用和移动应用” 分类中的 “使用 C++ 的桌面开发” 工作负荷。
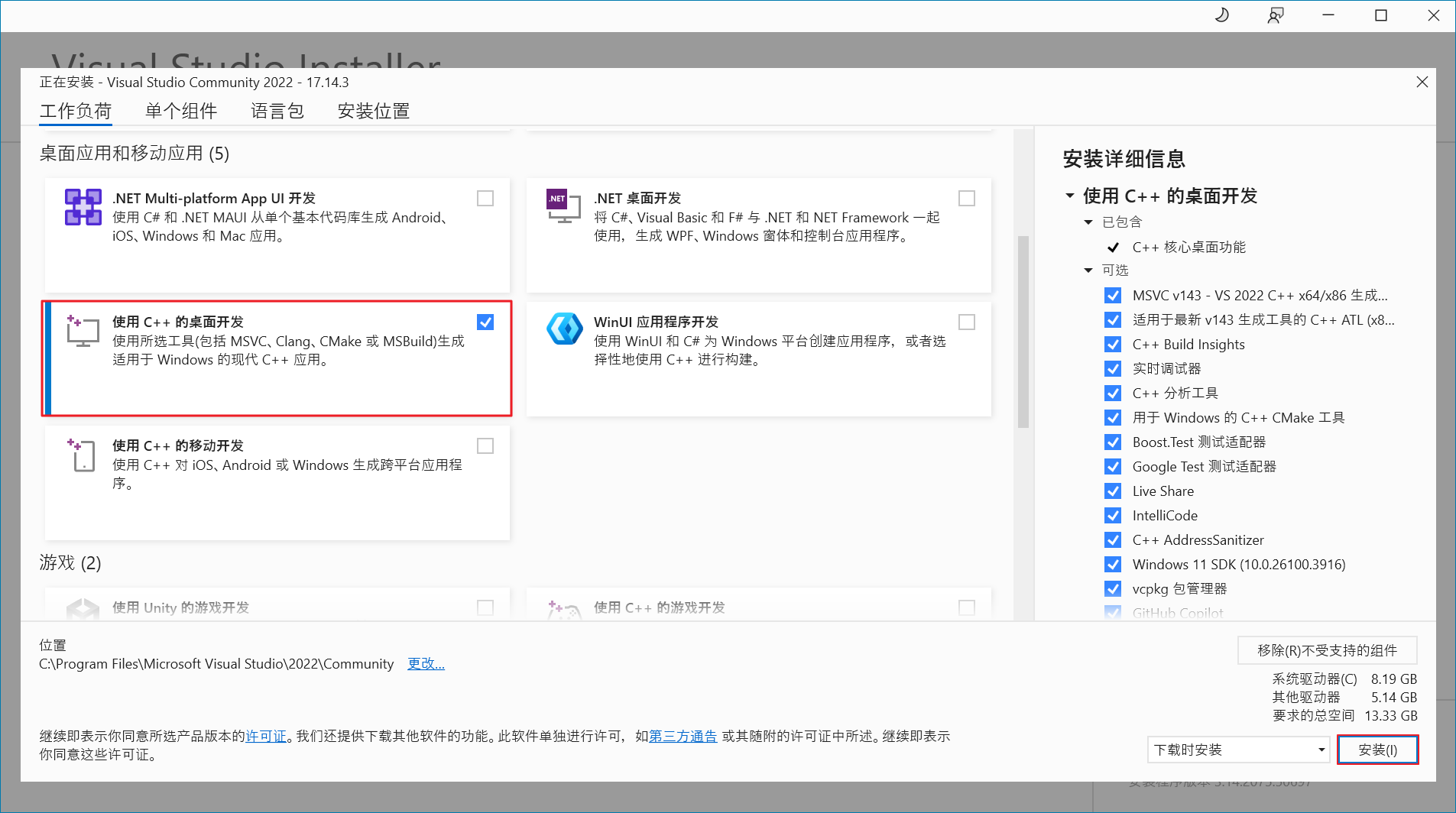
Visual Studio 安装
安装依赖3———OpenCV(可选)
备注
OpenCV 是可选依赖。未安装时,依赖 OpenCV 的示例功能(如图像保存)将被跳过,不影响示例的整体编译与运行。
推荐安装 OpenCV 4.11.0 版本(此版本经测试 100% 兼容支持,其他版本未经测试,不保证兼容性)。
在 OpenCV 官网 下载 Windows 预编译库。
双击下载的
.exe文件,记录安装路径。解压完成后,在系统环境变量中配置 OpenCV 库的路径。
具体步骤:进入 环境变量 对话框,选中 “Path” 一栏并点击 编辑,在 编辑环境变量 对话框中配置 OpenCV 库的路径。
OpenCV 环境配置
安装依赖4———USB 驱动(可选)
如需使用 USB 相机,需完成 USB 相机环境准备步骤。
编译
在
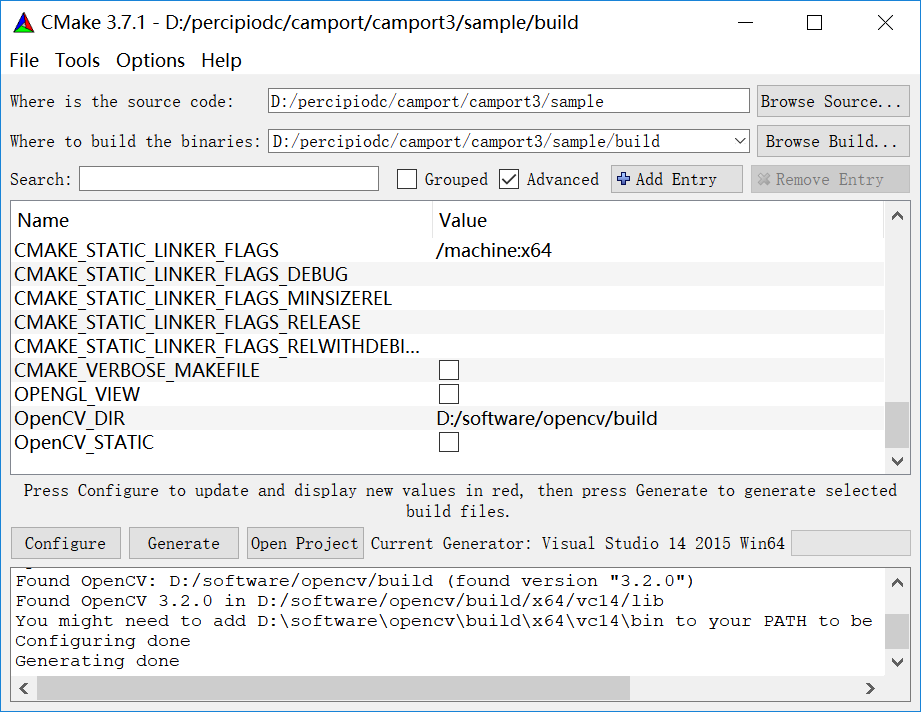
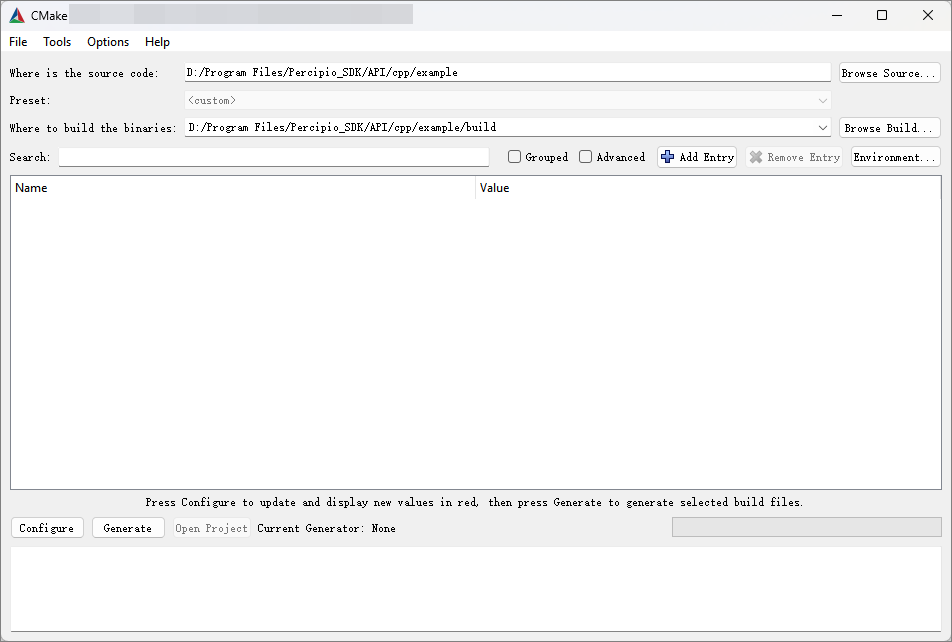
VcameraSDK-X.X.X/cpp/example目录下,新建build文件夹。启动 cmake-gui。
指定源码目录到 “example”,编译输出目录为 “example/build”。
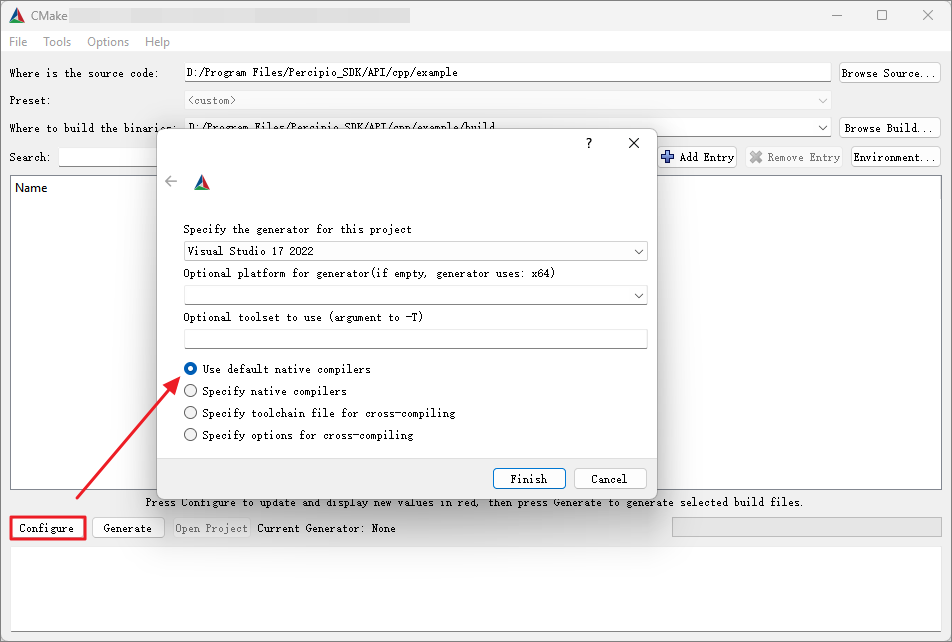
点击 Configure,选择 Visual Studio 的版本并点击 Finish。
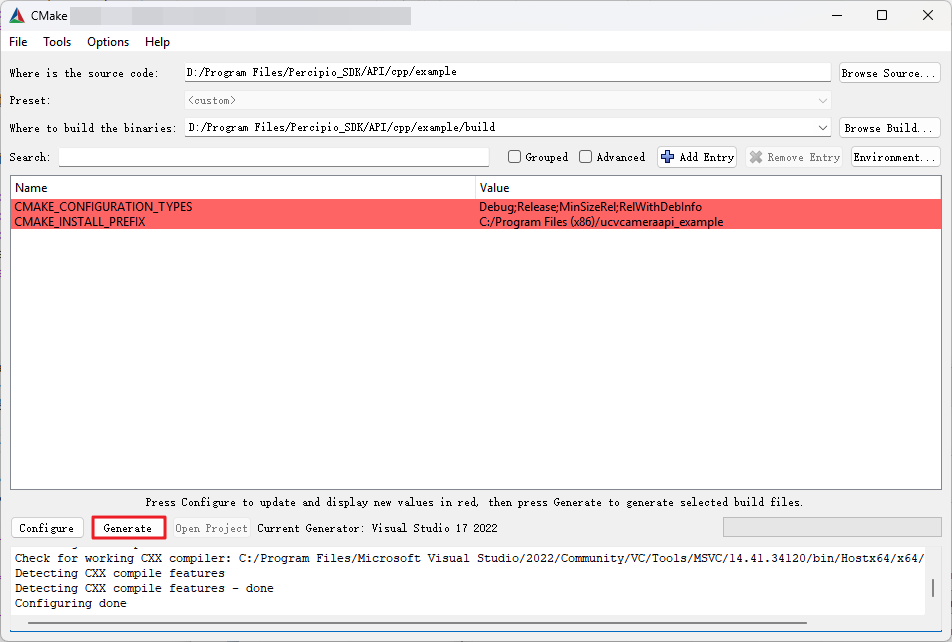
点击 Generate。
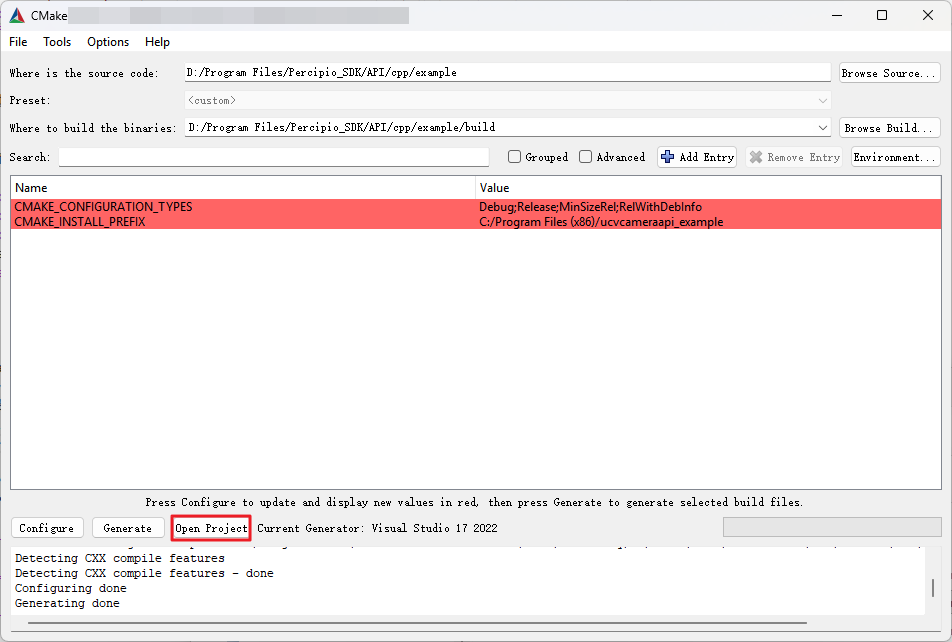
点击 Open Project,打开工程。
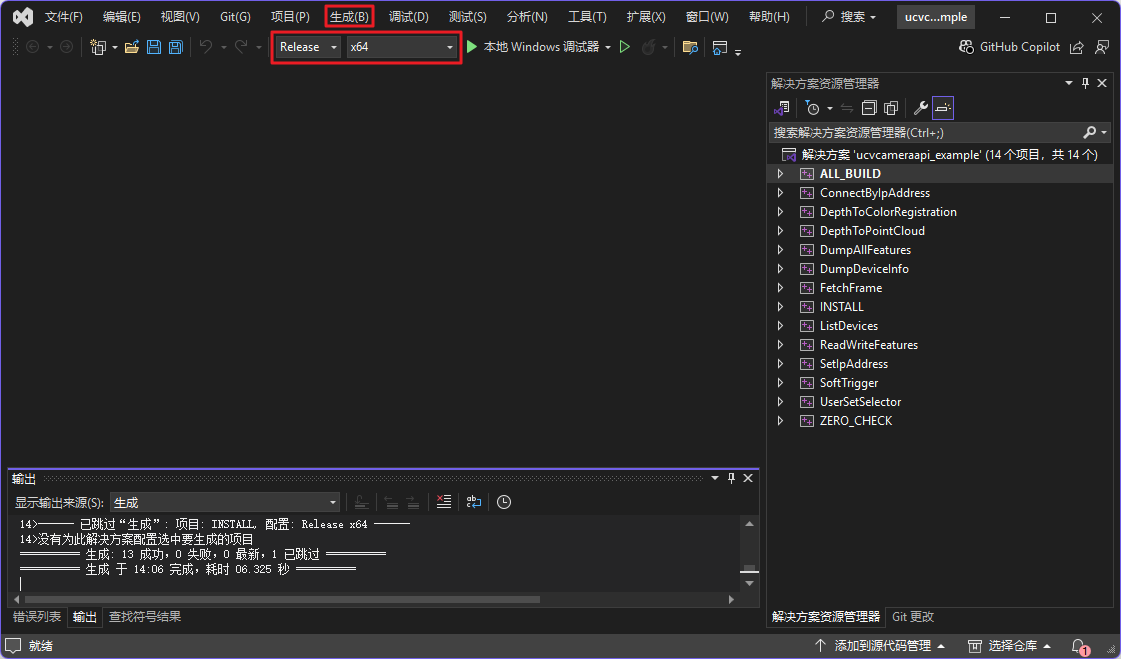
选择编译配置 “Release” (推荐)或 “Debug”,选择平台为 “x64”,点击 “生成” > “生成解决方案”。
运行
根据编译配置(Release 或 Debug),将
VcameraSDK-X.X.X/cpp/win/<编译配置>/bin中的 全部文件 复制到VcameraSDK-X.X.X/cpp/example/build/<编译配置>/目录下,请勿混用不同配置下的文件。若示例启用了 OpenCV,请将 OpenCV 安装目录下
build\x64\vc16\bin文件夹中的对应.dll文件复制到对应配置的输出目录下,如VcameraSDK-X.X.X/cpp/example/build/Release/或VcameraSDK-X.X.X/cpp/example/build/Debug/。具体操作:
若使用 Release 配置,复制
opencv_world<version>.dll(如opencv_world4120.dll)。若使用 Debug 配置,复制
opencv_world<version>d.dll(如opencv_world4120d.dll)。
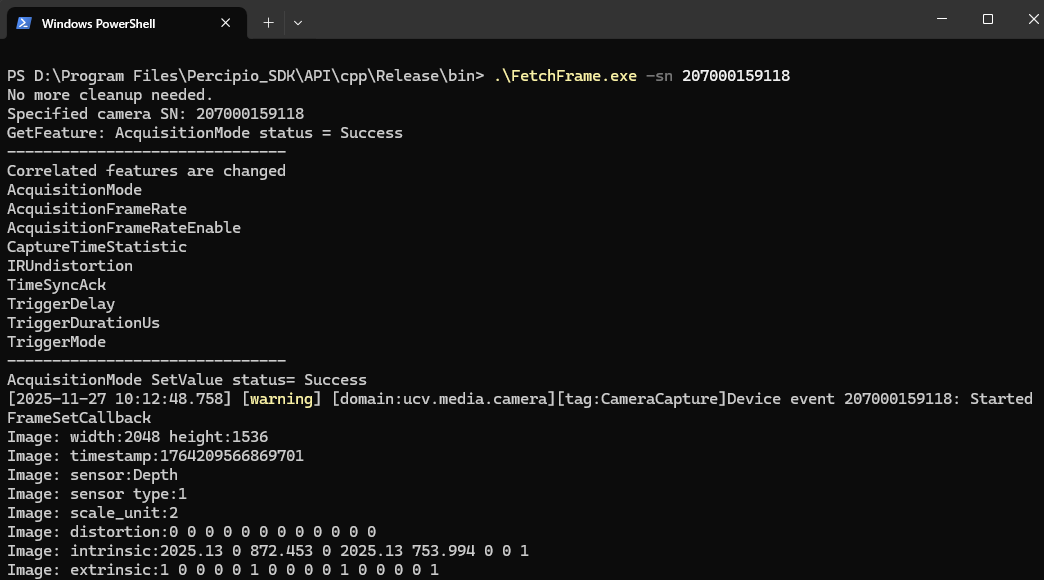
运行示例程序:
.\FetchFrame.exe -sn <相机序列号> -depth