ROS 1 平台
ROS(Robot Operating System,下文简称 ROS)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递,以及包管理。
搭建 ROS 1 开发环境
根据 Ubuntu 版本,安装对应的 ROS 1 开发平台。
Ubuntu16.04:ROS Kinetic
Ubuntu18.04:ROS Melodic
Ubuntu20.04:ROS Noetic
准备 USB 相机环境
如需使用 USB 相机,需完成 USB 相机环境准备。
下载 Camport ROS 1 SDK
ROS 1 SDK 支持 ROS Kinetic、ROS Melodic 和 ROS Noetic 平台。
选择以下任意方式,下载 Camport ROS 1 SDK:
使用 git 指令获取本地副本:打开终端,切换到需存放 SDK 的工作目录下,输入 git clone 命令克隆远程仓库。
git clone https://gitee.com/percipioxyz/camport_ros.git
选择以下任意方式,下载 Camport ROS 1 SDK:
使用 git 指令获取本地副本:打开终端,切换到需存放 SDK 的工作目录下,输入 git clone 命令克隆远程仓库。
git clone https://github.com/percipioxyz/camport_ros.git
Camport ROS 1 SDK 的 src 源码目录包含以下两个核心模块:
percipio_camera: 相机驱动核心模块,包括源文件和配置文件。percipio_camera/ ├── 📂 camport4/ # Camport4 SDK ├── 📂 cfg/ # 动态配置 ├── 📂 include/ # 头文件 ├── 📂 ros/ # ROS配置 ├── 📂 src/ # 源码 ├── 📂 srv/ # 服务定义 ├── 📂 test/ # 测试 ├── 📄 .travis.yml # CI配置 ├── 📄 CHANGELOG.rst # 更新日志 ├── 📄 CMakeLists.txt # 构建配置 ├── 📄 package.xml # ROS包定义 ├── 📄 percipio_nodelets.xml # Nodelet配置 └── 📄 README.md # 说明文档
percipio_launch:启动配置模块,包括 launch 包。该包通过 XML 配置文件实现 ROS 节点的启动与配置,支持定义节点名称、类型、参数等属性。同时,其 launch 文件支持服务节点的声明,便于订阅服务的功能集成。包内提供了 Python 示例程序,具体使用方法请参见 订阅主题。
percipio_launch/ ├── 📂 launch/ # ROS启动配置文件目录 │ ├── 📂 includes/ # 通用包含文件 │ ├── 📄 percipio.launch # 单相机启动配置 │ └── 📄 percipio_multi.launch # 多相机启动配置 ├── 📄 CHANGELOG.rst # 版本更新日志 ├── 📄 cloud.py # 点云显示与保存脚本 ├── 📄 CMakeLists.txt # CMake构建配置 ├── 📄 color.py # 彩色图像显示脚本 ├── 📄 depth.py # 深度图像显示脚本 ├── 📄 depthcloud.py # 彩色点云显示与保存脚本 ├── 📄 device_event_listen.py # 相机事件监听脚本 ├── 📄 dynamic_config.py # 动态参数配置脚本 ├── 📄 package.xml # ROS包定义文件 ├── 📄 parameters.xml # 相机参数配置文件 ├── 📄 reset.py # 相机软件复位脚本 └── 📄 soft_trigger.py # 软触发控制脚本
编译
在开发包根目录下执行以下命令,进行编译:
catkin_make -DCMAKE_BUILD_TYPE=Release
catkin_make install
编译后会生成 build 文件夹(包含中间文件)和 devel 文件夹(包含最终文件:头文件、动/静态库、可执行文件)。
备注
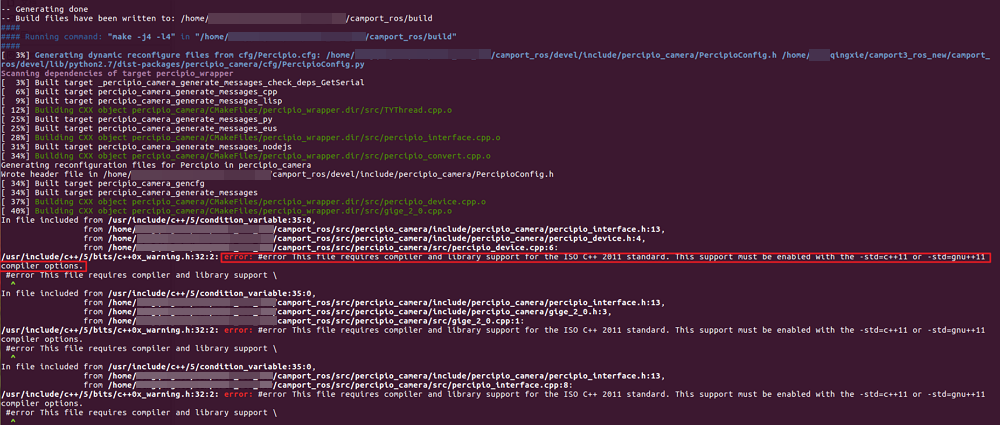
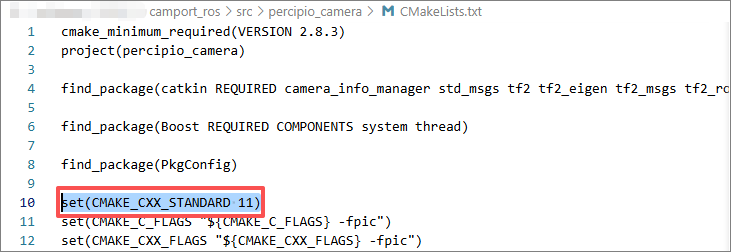
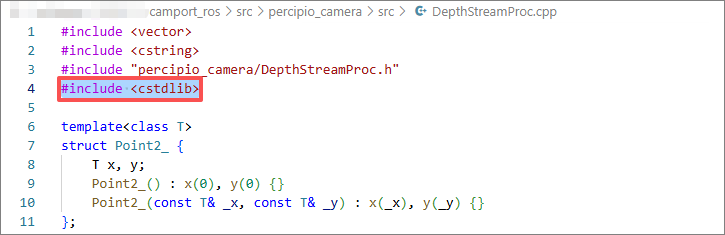
若在 Ubuntu 16.04 上编译报错,请参见 Ubuntu 16.04 编译 ROS 1 SDK 失败。
配置环境变量
在开发包根目录下执行以下命令,配置环境变量:
echo "source <开发包存放路径>/camport_ros/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
修改相机参数
备注
如使用 USB 相机,请先完成 USB 相机环境准备步骤,再进行以下操作。
ROS 1 支持通过以下三种方式修改相机参数。
方法一:通过 Viewer 软件提前设置参数并保存至相机(推荐)
GigE2.1 相机(PMD 系列与 GM 系列相机)
通过 Viewer 软件 将参数设置保存至 UserSet 属性组,并将该组设置为默认加载的 User Set 属性组,相机上电后将自动加载该 User Set 属性组的参数配置。
GigE2.0 相机(除 PMD 系列与 GM 系列以外的相机)
通过 Percipio Viewer 软件 将参数设置保存至相机 Storage 区,ROS 启动时将自动加载 storage 区的参数配置并开始采集图像。
方法二:编辑 percipio.launch 配置文件
在 percipio.launch 文件中配置相机节点启动时加载的参数。该方法仅适用于设置文件中包含的参数。
具体步骤如下:
执行以下命令,打开
percipio.launch文件:
cd src/percipio_launch/launch/ gedit percipio.launch
根据实际需求调整配置文件中的参数值。
示例:指定相机
在文件中找到 device_id 参数,修改其 default 值。
<arg name="device_id" default="207000106930" />
小技巧
device_id 默认值为 #1,表示默认打开找到的第一个相机。
default 设置为相机 SN 时,表示通过指定序列号打开相机。
default 设置为相机 IP 时,表示通过指定 IP 打开相机。
更多参数配置说明,请参见下表。
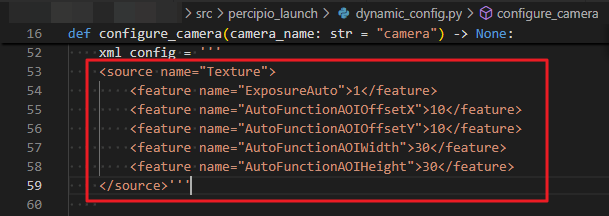
方法三:编辑 parameters.xml 配置文件
进入 “src/percipio_launch” 中配置相机节点启动时加载的参数。该方法仅适用于设置文件中包含的参数。
参数设置说明如下:
1.Float型参数
<feature name="DepthScaleUnit">0.125</feature> //0.125对应的地方写目标参数值
2.Int型参数
<feature name="DepthSgbmImageNumber">1</feature> //1对应的地方写目标参数值
3.Bool型参数
<feature name="ExposureAuto">1</feature> //1对应的地方写值,注意此处写1或0,不能写true或false
4.Enum型参数
<feature name="DepthStreamTofChannel">0</feature> //0对应的地方写枚举值对应的整型值
启动相机节点
在开发包根目录下执行以下命令,启动相机节点:
roslaunch percipio_launch percipio.launch
若相机节点正常启动,终端会打印相机 IP、SN、深度图及彩色图格式与分辨率等信息。
注意
运行过程中,请勿关闭该服务终端。
订阅主题
可用的主题
/camera/PercipioDeviceEvent
/camera/Pointcloud2
/camera/camera_nodelet_manager/bond
/camera/depth/camera_info
/camera/depth/image
/camera/dynamic_config
/camera/ir/camera_info
/camera/ir/image
/camera/percipio_camera/parameter_descriptions
/camera/percipio_camera/parameter_updates
/camera/reset
/camera/rgb/camera_info
/camera/rgb/image
/rosout
/rosout_agg
/tf_static
预览图像
“src/percipio_launch” 包含 Python 示例程序,如查看深度图、彩色图、点云图、彩色点云图。
depth.py:使能指定相机采集指定图像格式和分辨率的深度图像。a. 打开终端1,运行roslaunch percipio_launch percipio.launch以启动相机节点。b. 打开终端2,切换到 “src/percipio_launch” 路径下。输入python3 depth.py并运行。弹出的窗口将实时显示指定相机的深度图像。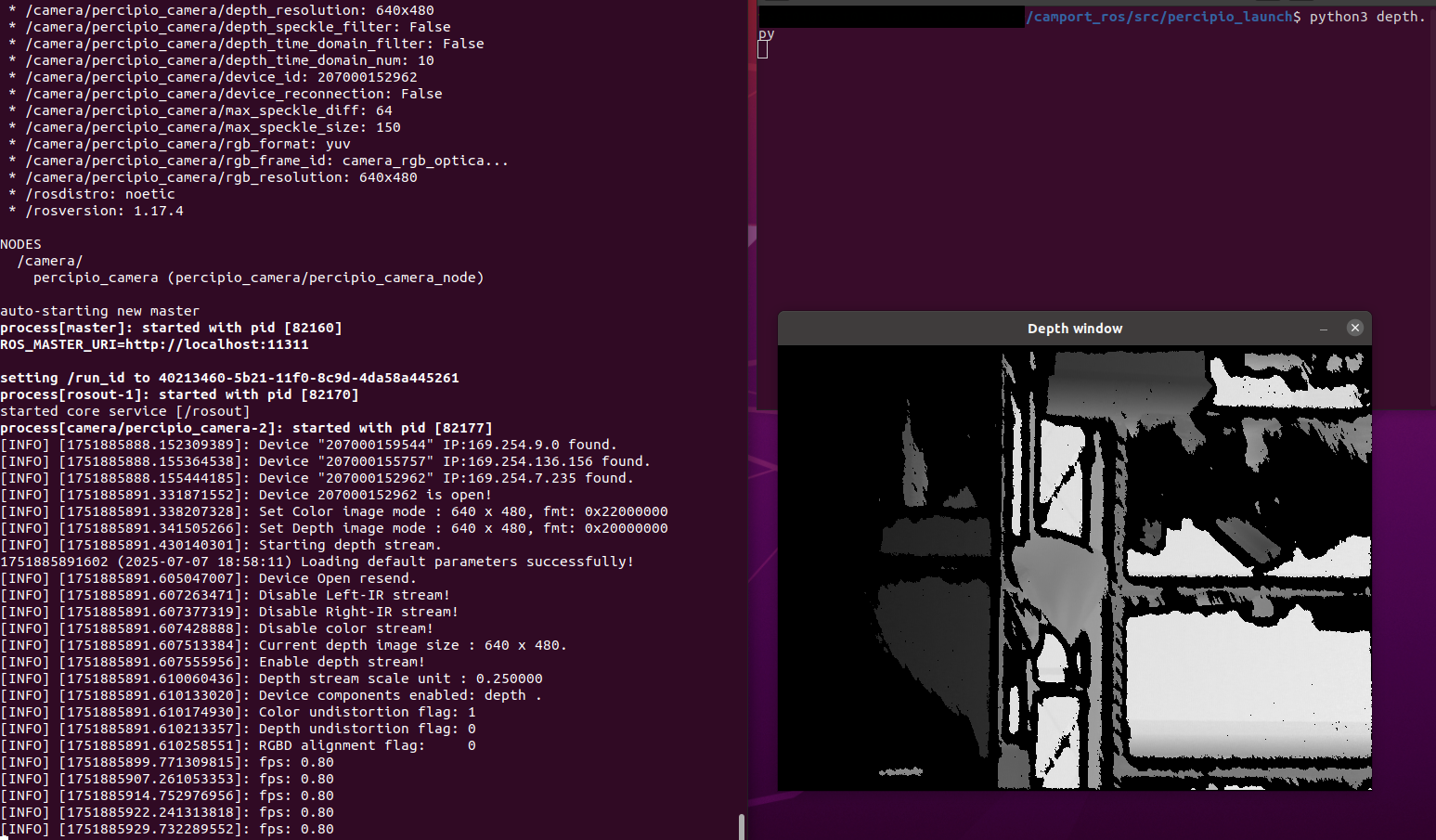
depth.py 运行结果
color.py:使能指定相机采集到指定图像格式和分辨率的彩色图像。a. 打开终端1,运行roslaunch percipio_launch percipio.launch以启动相机节点。b. 打开终端2,切换到 “src/percipio_launch” 路径下。输入python3 color.py并运行。弹出的窗口将实时显示指定相机的 color 图像。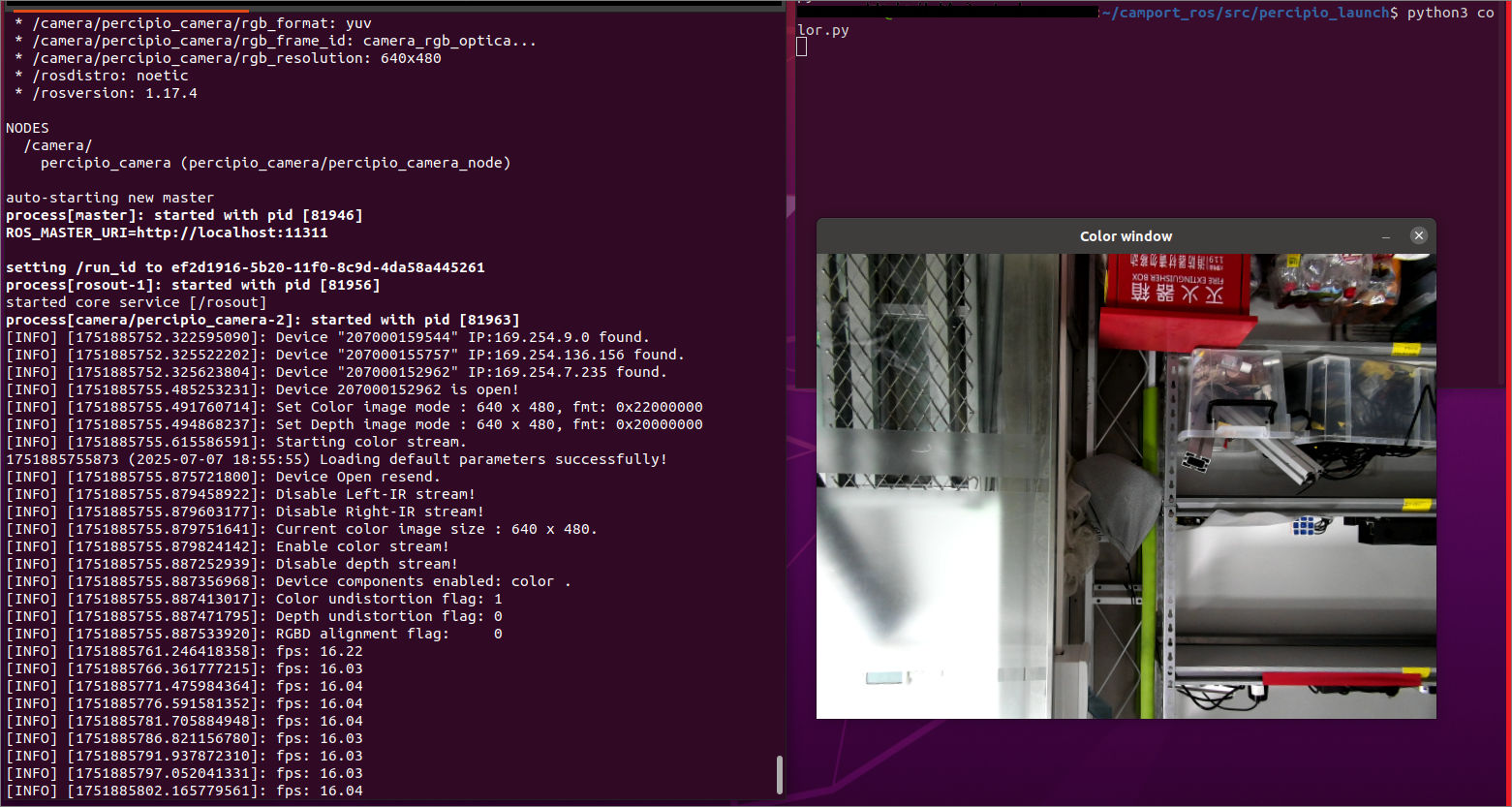
color.py 运行结果
cloud.py:使能指定相机采集到指定图像格式和分辨率的点云并保存。a. 打开终端1,运行roslaunch percipio_launch percipio.launch以启动相机节点。b. 打开终端2,切换到 “src/percipio_launch” 路径下。输入python3 cloud.py并运行。弹出的窗口将实时显示指定相机的原始点云。同时,终端2将打印点云保存路径与点云点数。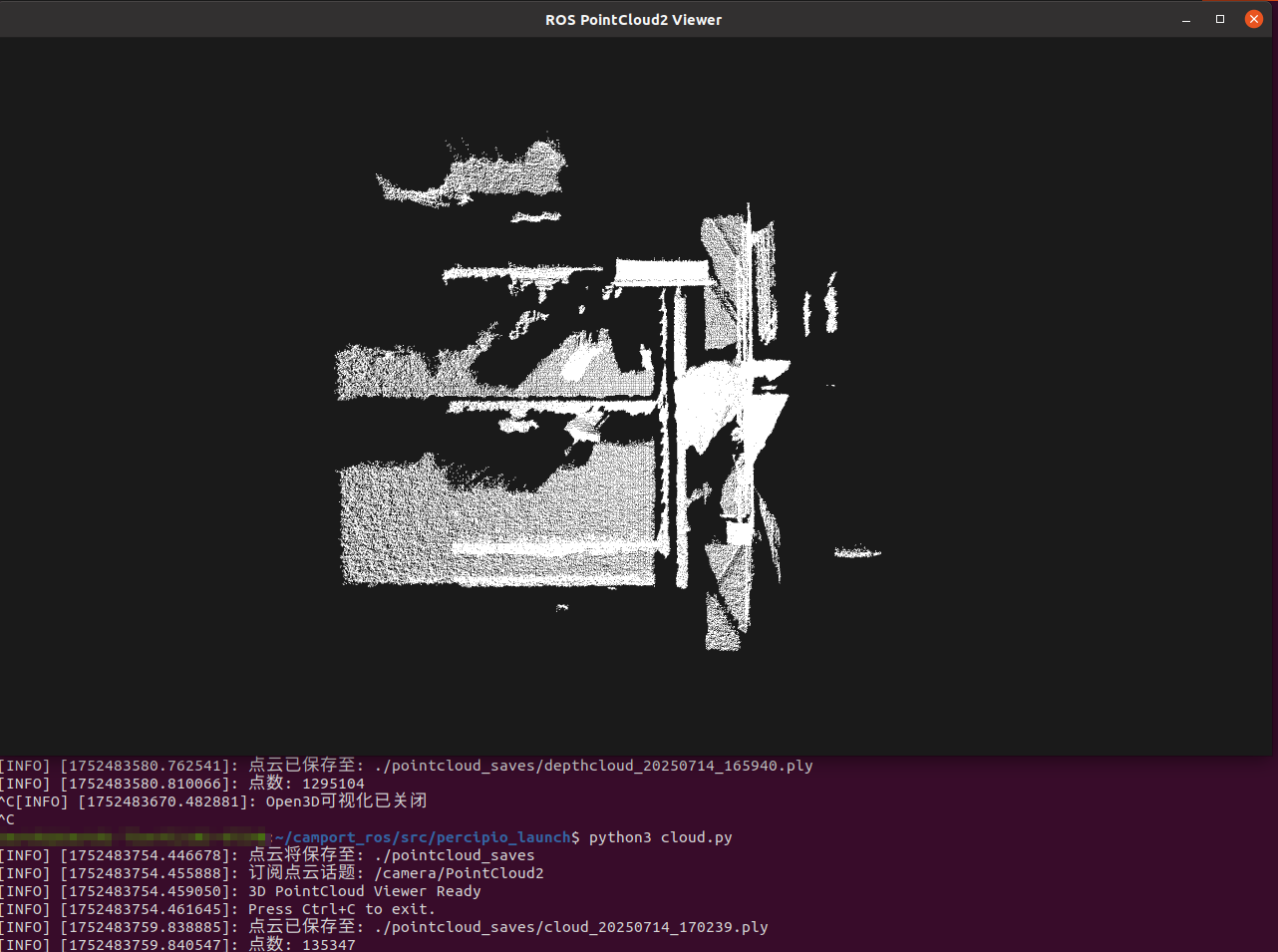
cloud.py 运行结果
depthcloud.py:使能指定相机采集指定图像格式和分辨率的彩色点云并保存。a. 在percipio.launch文件中,将 depth_registration 置为 true 并保存。b. 打开终端1,运行roslaunch percipio_launch percipio.launch以启动相机节点。c. 打开终端2,切换到 “src/percipio_launch” 路径下。输入python3 depthcloud.py并运行。弹出的窗口将实时显示指定相机的彩色点云。同时,终端2将打印点云保存路径与点云点数。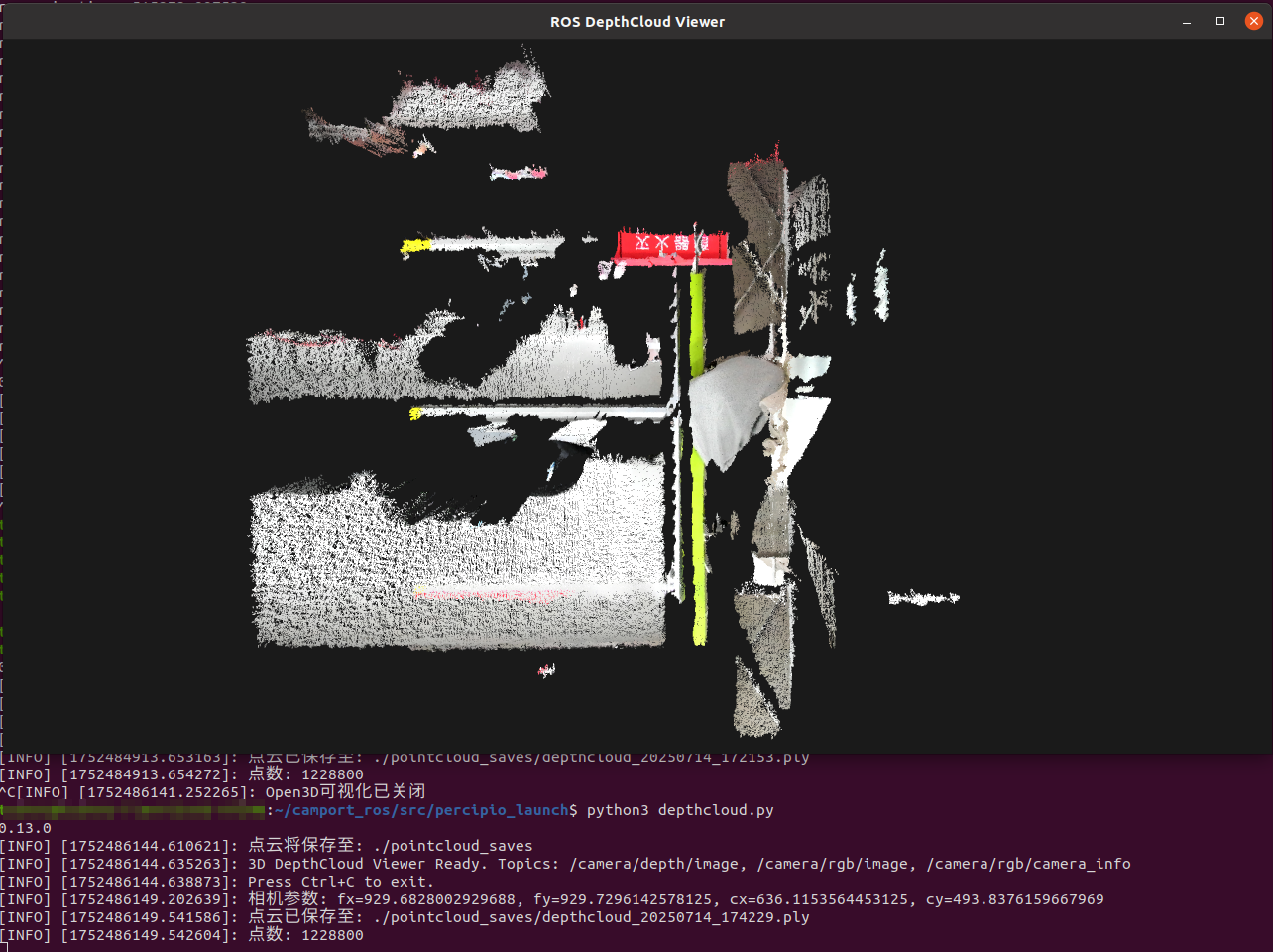
depthcloud.py 运行结果
监听相机事件
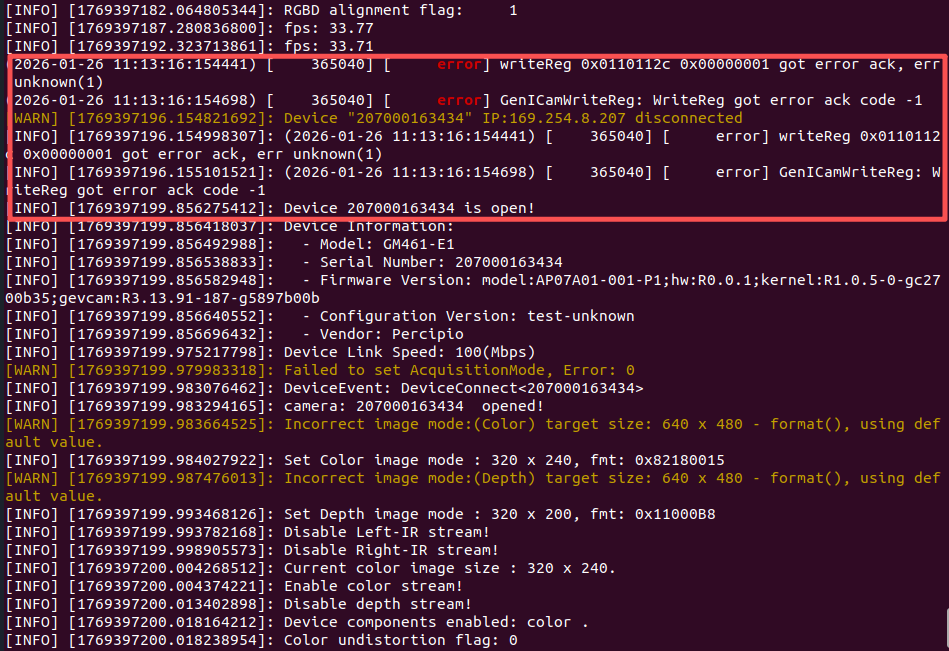
device_event_listen.py:用于监听相机事件,如掉线、相机上线等功能。
a. 打开终端1,运行roslaunch percipio_launch percipio.launch以启动相机节点。b. 打开终端2,切换到 “src/percipio_launch” 路径下。运行python3 device_event_listen.py。终端2上会显示监听到的事件(如相机断电重启后,显示相机掉线和连接)。
device_event_listen.py 运行结果
动态修改相机参数
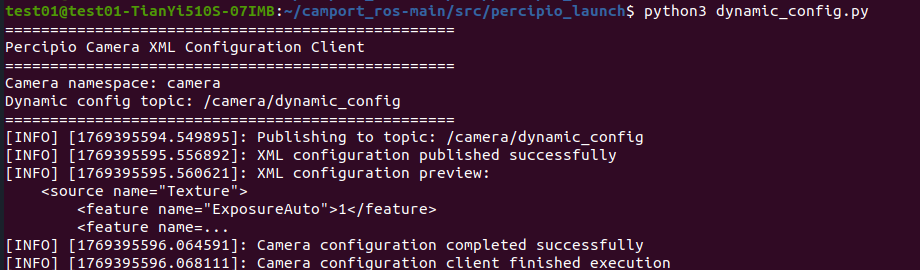
dynamic_config.py:相机在运行期间,可通过该脚本动态修改相机参数。
相机软复位
reset.py:当相机运行报错的时候,不方便对相机断电重启操作,可以通过该脚本使相机复位。

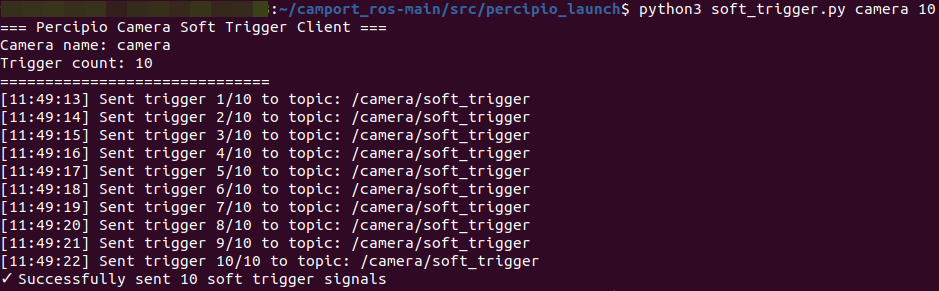
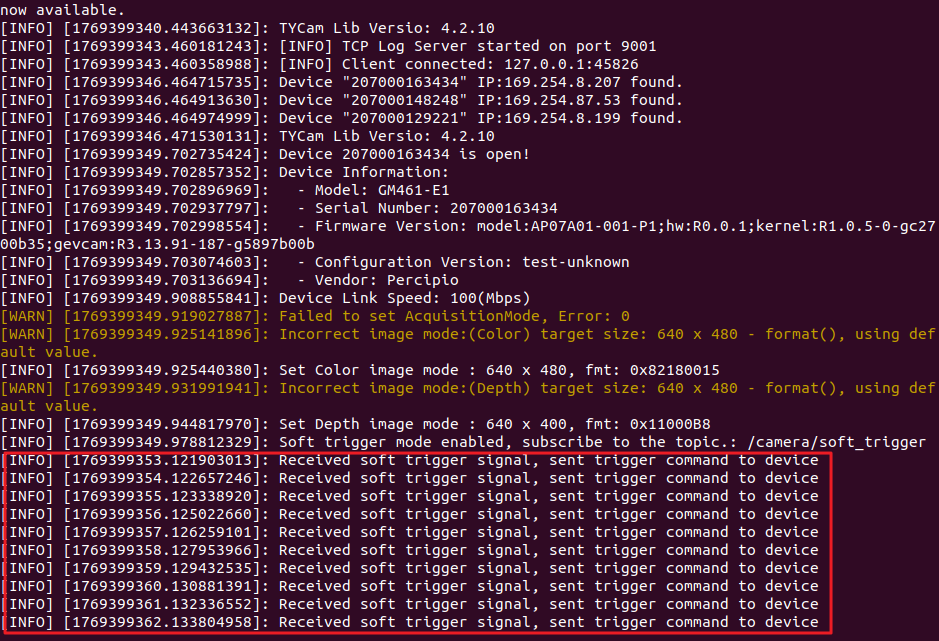
发送软触发信号
soft_trigger.py:用于发送软触发信号,相机收到信号后采集图像。
辅助工具说明
list_devices 枚举相机
运行以下代码,可枚举与电脑连接的图漾相机。
rosrun percipio_camera list_devices
network_ip_config 设置相机 IP 地址
运行以下代码,并按照提示操作,可完成相机 IP 地址设置。支持设置静态 IP 地址和动态 IP 地址。
rosrun percipio_camera network_ip_config
多相机配置与启动
ROS 1 支持多相机同时工作,请按以下步骤配置并启动多相机系统:
进入 “/src/percipio_launch/launch” 路径,打开
percipio_multi.launch文件并完成多相机配置。
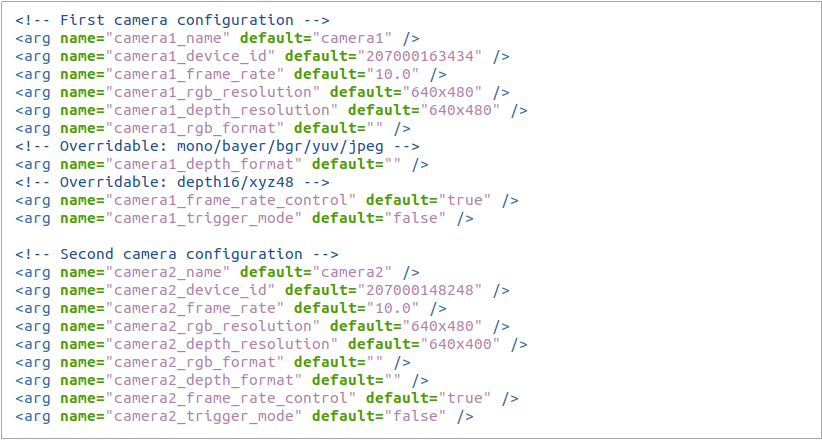
percipio_multi.launch 文件
打开终端并运行以下代码,启动相机节点。
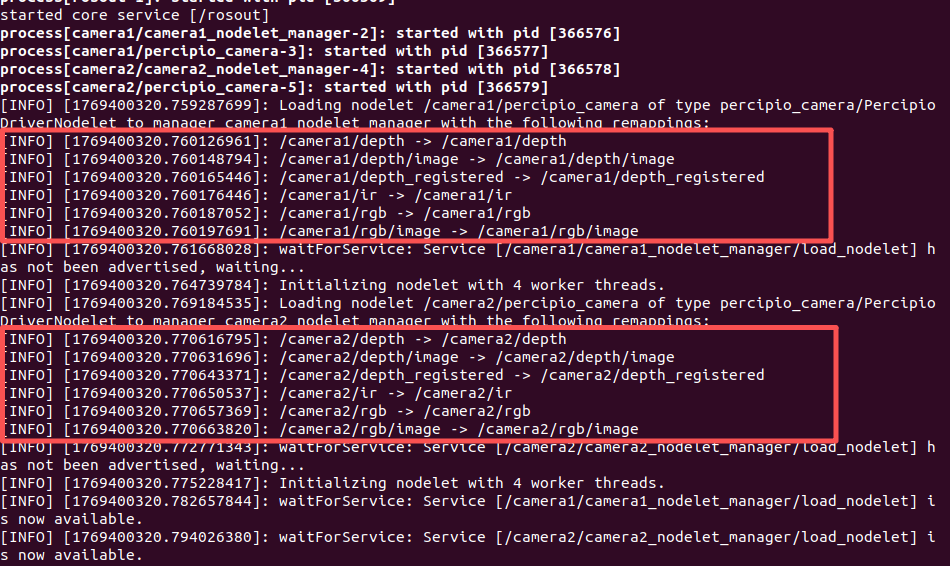
roslaunch percipio_launch percipio_multi.launch
启动成功后,终端将显示这两台相机已被配置且打开。
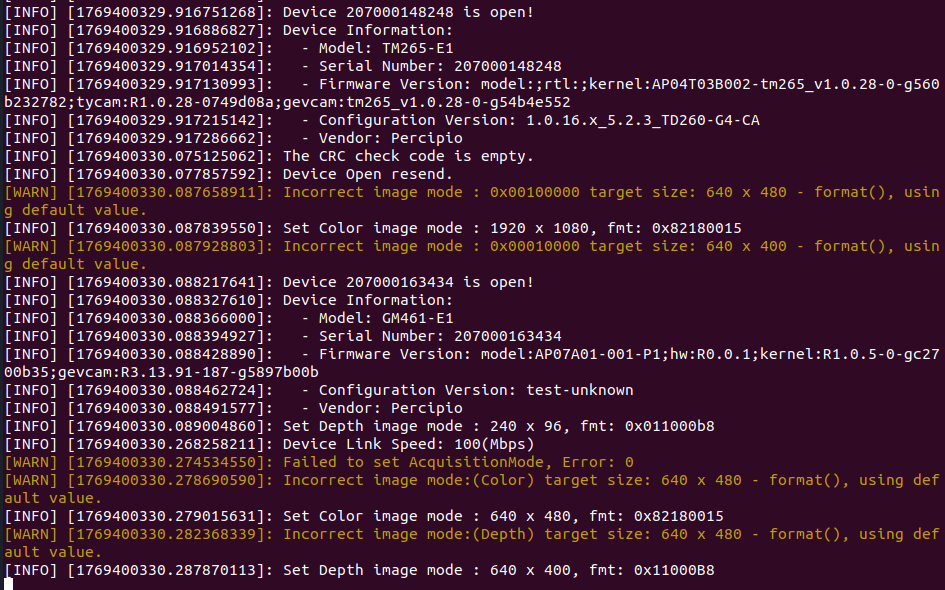
订阅主题并采集图像。
常见问题
Ubuntu 16.04 编译 ROS 1 SDK 失败
启用时域滤波后,运行 python3 depth.py 无法立即输出深度图
时域滤波功能需先采集 2-10 帧原始深度数据填充缓冲区(具体帧数可配置),经多帧时间域融合计算后才会输出深度图像,因此程序启动后会存在短暂延迟。
相机实际输出的图像格式或分辨率未按照 UserSet 用户预设参数或 Storage 存储区的配置
如相机存储区或者 UserSet 中设置了图像的格式和分辨率,且 percipio.launch 文件也配置了图像的分辨率和格式,那么,ROS 优先通过 launch 文件动态设置这些参数。