Concatenate 连接元素
Concatenate 算子为连接元素,用于连接多个相同类型。适用的类型有 Cube 、JointArray 、PointCloud 、PolyData 、Pose、ImagePoints 。
| 类型 | 功能 |
|---|---|
| Cube | 用于连接多个立方体或立方体列表。 |
| Image | 用于连接多个图像或图像列表。 |
| JointArray | 用于连接多个机器人关节弧度值或机器人关节弧度值列表。 |
| PointCloud | 用于连接多个点云或者点云列表。 |
| PolyData | 用于连接多个 3D 模型或者 3D 模型列表。 |
| Pose | 用于连接多个坐标或者坐标列表。 |
| String | 用于连接多个字符串或者字符串列表 |
| ImagePoints | 用于连接多个图像关键点坐标或者坐标列表。 |
Cube
将 Concatenate 算子的 类型 属性选择为立方体,用于连接多个立方体或立方体列表。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。立方体列表/cube_list:设置立方体列表在 3D 视图中的可视化属性。 打开立方体列表可视化。
打开立方体列表可视化。 关闭立方体列表可视化。
关闭立方体列表可视化。 设置立方体列表的颜色。取值范围:[-2,360] 。默认值:-2 。
设置立方体列表的颜色。取值范围:[-2,360] 。默认值:-2 。 设置立方体列表的透明度。取值范围:[0,1] 。默认值:0.5 。
设置立方体列表的透明度。取值范围:[0,1] 。默认值:0.5 。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
cube_?:数据类型:Cube
输入内容:立方体数据列表
cube_list_?:数据类型:CubeList
输入内容:立方体数据列表
输出:
立方体列表:数据类型:CubeList
输出内容:连接后的立方体数据
功能演示
使用 Concatenate 算子中立方体,连接多 2 个立方体组成一个立方体列表。
步骤1:算子准备
添加 Trigger 、Emit ( 2 个)、Concatenate 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → 立方体
坐标 → 0 0 0 0 0 0
宽度→ 1
高度→ 1
深度 → 1
设置 Emit_1 算子参数:
类型 → 立方体
坐标 → 0 0 0.75 0 0 0
宽度→ 0.5
高度 → 0.5
深度 → 0.5
设置 Concatenate 算子参数:
类型 → 立方体
立方体列表 →
可视
步骤3:连接算子
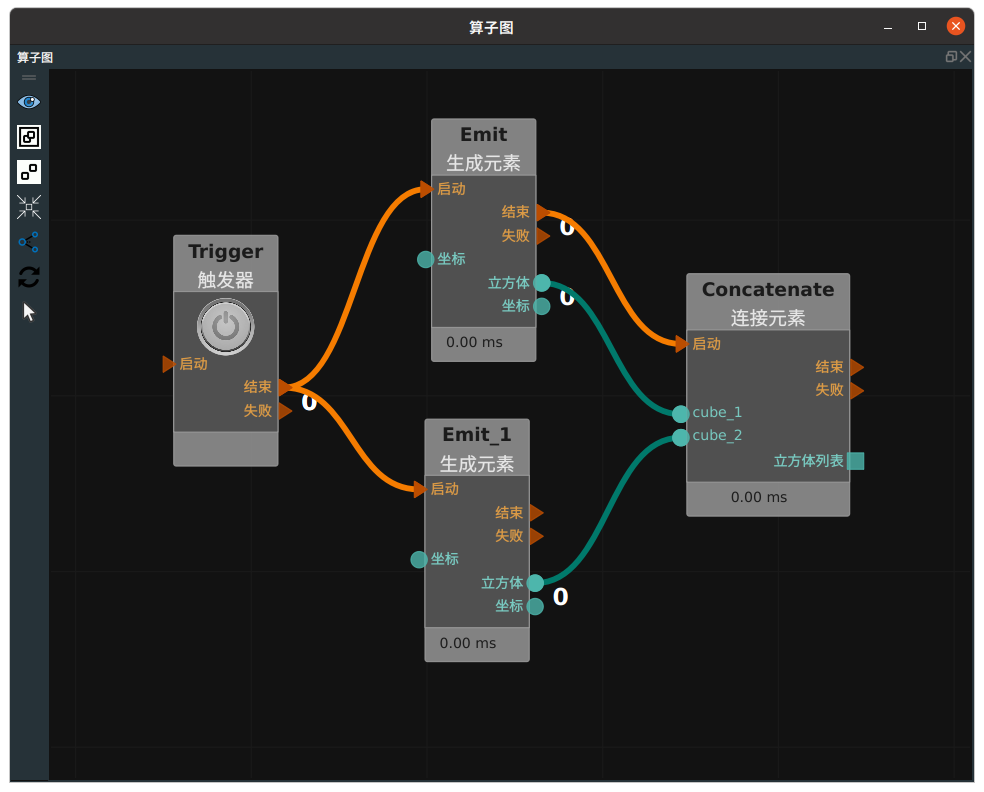
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
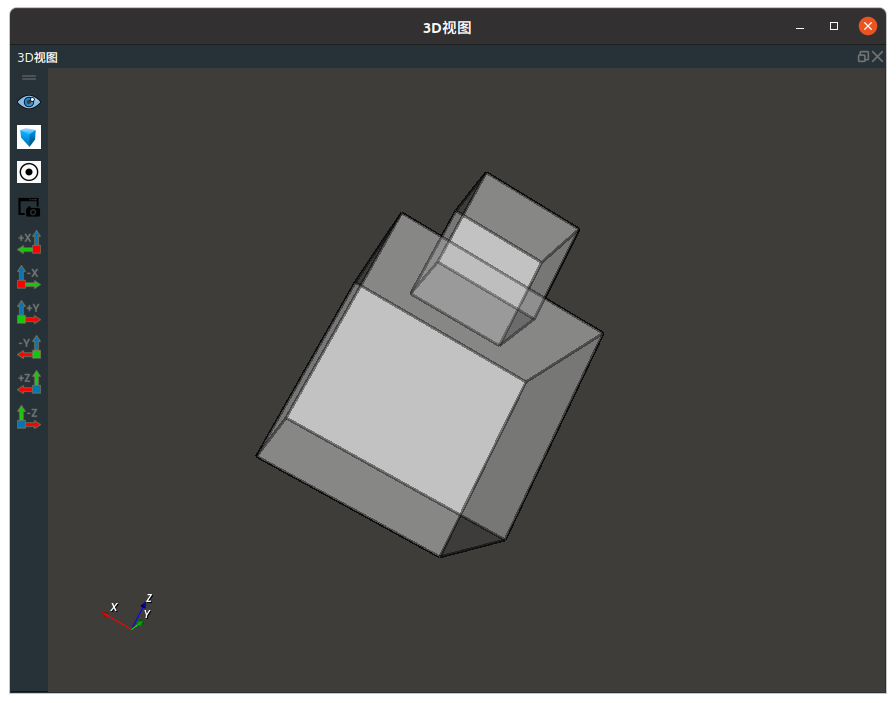
运行结果
结果如下图所示,在 3D 视图中显示生成的两个立方体所连接的一个立方体列表。
Image
将 Concatenate 算子的 类型 属性选择为图像,用于连接多个图像或图像列表。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。图像列表/image_list:设置图像列表在 3D 视图中的可视化属性。- 打开图像列表可视化。
- 关闭图像列表可视化。
数据信号输入输出
输入:
image_?:数据类型:Image
输入内容:图像数据
image_list_?:数据类型:ImageList
输入内容:图像数据列表
输出:
图像列表:数据类型:ImageList
输出内容:连接后的图像数据列表
功能演示
本节将使用 Concatenate 算子中图像,连接2个加载的图像组成一个图像列表。
这与 Concatenate 算子中关节属性的连接多个机器人关节弧度值或机器人关节弧度值列表的方法相同,请参照该章节的功能演示。
JointArray
将 Concatenate 算子 类型 属性选择为 关节 ,用于连接多个机器人关节弧度值或机器人关节弧度值列表。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
joint_?:数据类型:JointArray
输入内容:机器人关节弧度值
joint_list_?:数据类型:JointArrayList
输入内容:机器人关节弧度值列表
输出:
关节列表:数据类型:JointArray
输出内容:连接后的机器人关节弧度值列表
功能演示
使用 Concatenate 算子中关节,连接 2 个加载的机器人关节弧度值,组成一个机器人关节弧度值列表。
步骤1:算子准备
添加 Trigger 、Load(2个) 、Concatenate 算子至算子图。
步骤2:设置算子参数
设置 Load / Load_1 算子参数:
类型 → 关节
文件 →
 → 选择 jointarray 文件名( Joints.txt / Joints1.txt )
→ 选择 jointarray 文件名( Joints.txt / Joints1.txt )
设置 Concatenate 算子参数:
类型 → 关节
步骤3:连接算子
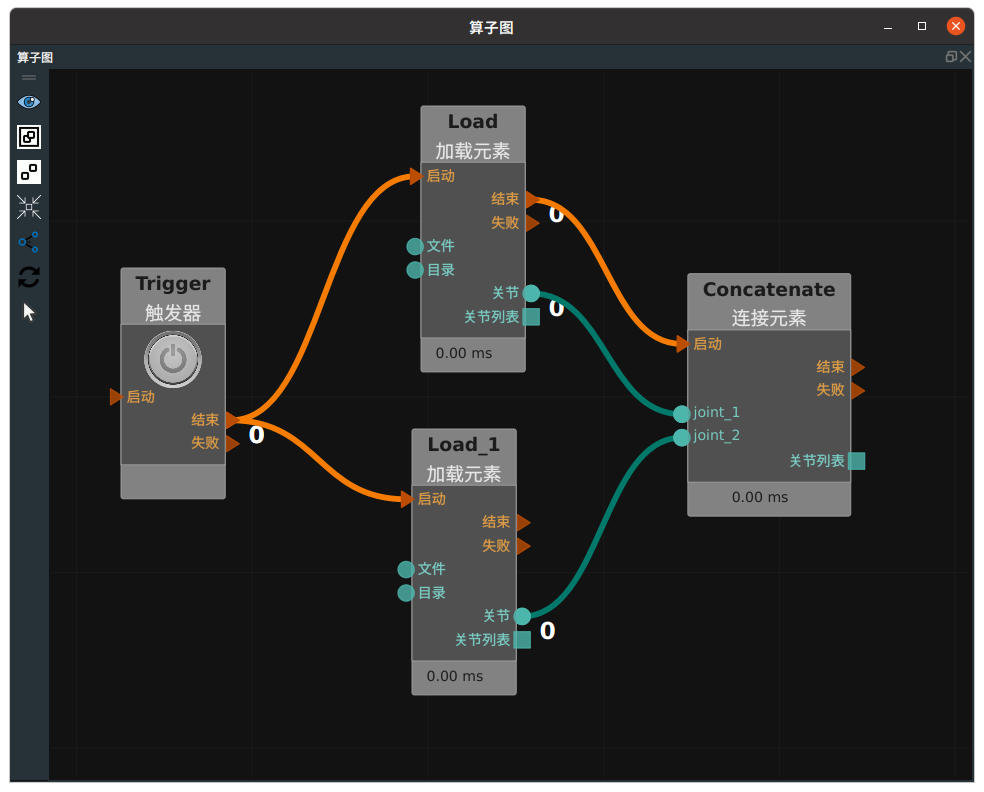
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
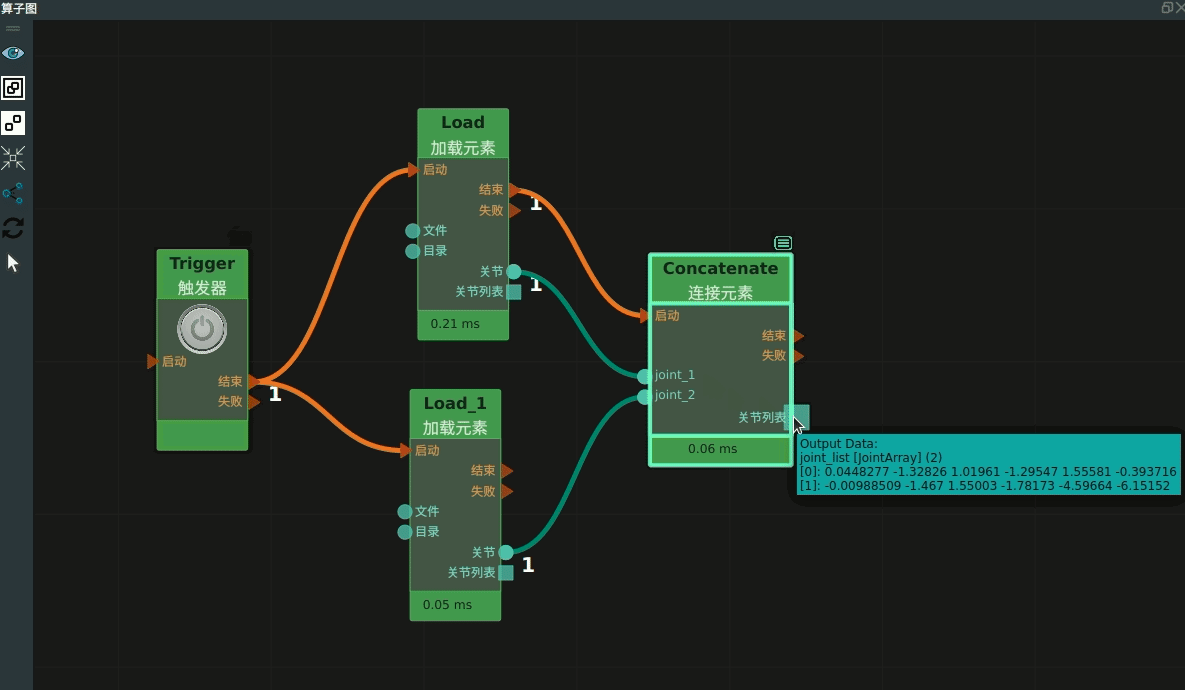
运行结果
结果如下图所示,Concatenate 算子的右侧输出端口输出两个加载出的关节所连接成的一个关节列表 。
PointCloud
将 Concatenate 算子 类型 属性选择为点云,用于连接多个点云或者点云列表。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。点云列表/cloud_list:设置点云列表在 3D 视图中的可视化属性。- 打开点云列表可视化。
- 关闭点云列表可视化。
- 设置 3D 视图中点云列表的颜色。取值范围:[-2,360] 。默认值:-1 。
 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
cloud_?:数据类型:PointCloud
输入内容:点云数据
cloud_list_?:数据类型:PointCloudList
输入内容:点云列表数据
输出:
点云列表:数据类型:PointCloudList
输出内容:连接后的点云列表数据
功能演示
本节将使用 Concatenate 算子中点云,连接2个加载的点云组成一个点云列表。
这与 Concatenate 算子中关节属性的连接多个机器人关节弧度值或机器人关节弧度值列表的方法相同,请参照该章节的功能演示。
PolyData
将 Concatenate 算子 类型 属性选择为多边形,用于连接多个 3D 模型或者 3D 模型列表。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。多边形列表/polydata_list:设置 3D 模型列表在 3D 视图中的可视化属性。- 打开 3D 模型列表可视化。
- 关闭 3D 模型列表可视化。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
polydata_?:数据类型:PolyData
输入内容:polydata 数据
polydata_list_?:数据类型:PolyDataList
输入内容:polydata 数据列表
输出:
多边形列表:数据类型:PolyDataList
输出内容:连接后的 PolyData 列表数据
功能演示
本节将使用 Concatenate 算子中 多边形 ,用于连接 2 个 3D 模型列表,组成一个 3D 模型列表。
这与 Concatenate 算子中 关节 属性的连接多个机器人关节弧度值或机器人关节弧度值列表的方法相同,请参照该章节的功能演示。
Pose
将 Concatenate 算子 类型 属性选择为坐标,用于连接多个 pose 或者 pose 列表。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。坐标列表/pose_list:设置 pose 列表在 3D 视图中的可视化属性。- 打开 pose 列表列表可视化。
- 关闭 pose 列表列表可视化。
- 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
pose_?:数据类型:Pose
输入内容:pose 数据
pose_list?:数据类型:PoseList
输入内容:pose 列表数据
输出:
坐标列表:数据类型:PoseList
输出内容:连接后的 pose 列表数据
功能演示
本节将使用 Concatenate 算子中 坐标 ,连接 2 个 pose 组成一个 pose 列表。
这与 Concatenate 算子中 关节 属性的连接 2 个机器人关节弧度值方法相同,请参照该章节的功能演示。
String
将 Concatenate 算子 类型 属性选择为 字符串 ,用于连接多个字符串。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。分隔符/delimiter:设置连接字符串与字符串之间的分隔符号。包含:“space”、“;”、“,”、“#”、“&”、“*”。字符串列表/string_list:设置字符串列表的曝光属性。曝光后可以与交互面板中输出工具“表格”进行绑定。- 打开曝光。
- 关闭曝光。
字符串/string:设置字符串的曝光属性。曝光后可以与交互面板中输出工具“文本框”或“表格”进行绑定。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
string_?:数据类型:String
输入内容:字符串数据
string_list_?:数据类型:StringList
输入内容:字符串l列表数据
输出:
字符串列表:数据类型:StringList
输出内容:连接后字符串列表数据
字符串:数据类型:String
输出内容:连接后字符串数据
功能演示
使用 Concatenate 算子中 字符串 ,将生成 2 个字符串组合成字符串列表和单个字符串输出。
步骤1:算子准备
添加 Trigger 、Emit (2个)、Join 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型→ 字符串
字符串 → RVS
设置 Emit_1 算子参数:
类型 → 字符串
字符串 → 2013
设置 Join 算子参数:
类型 → 字符串
分隔符 → ;
字符串列表 →
曝光字符串 →
曝光
步骤3:连接算子
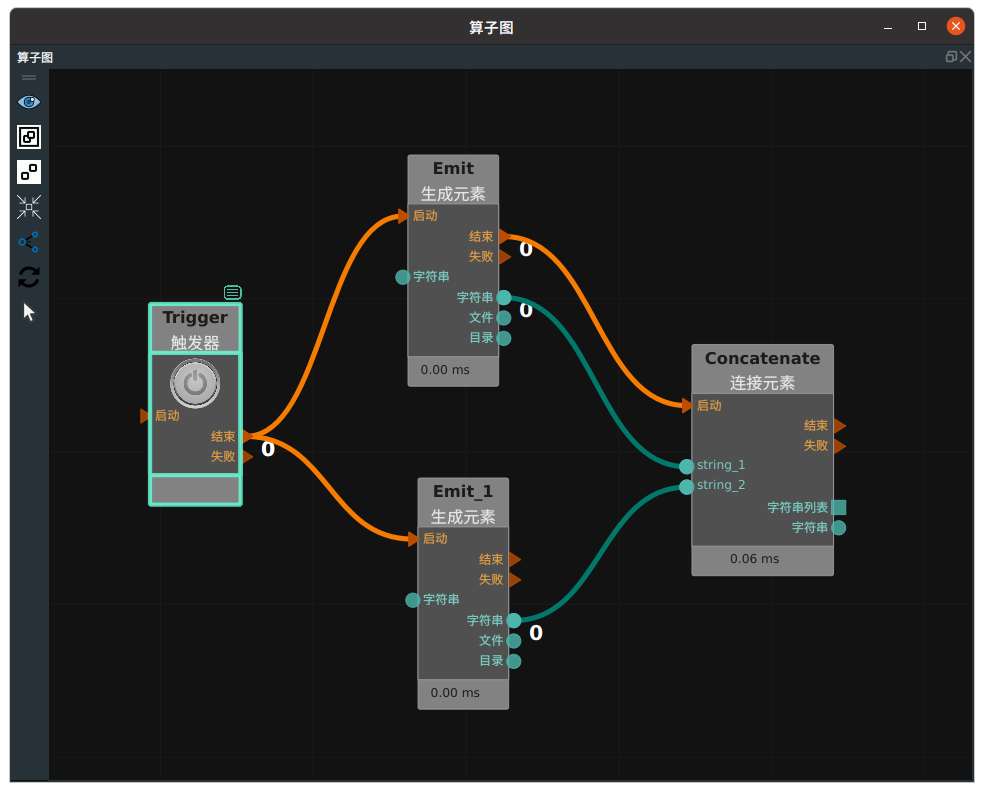
步骤4:运行
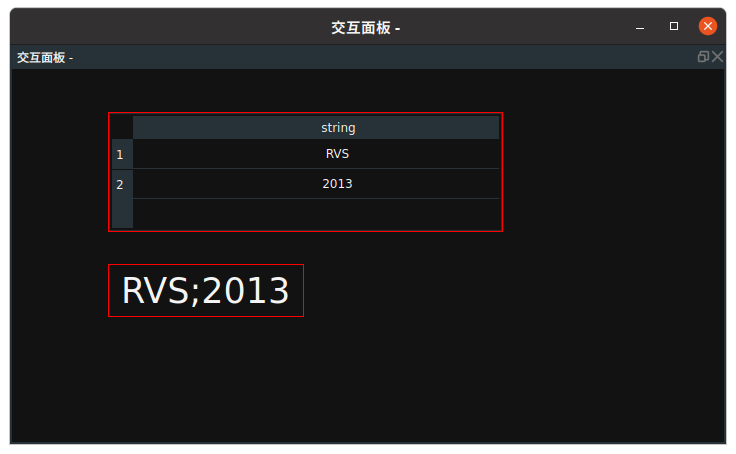
将
字符串列表与交互面板中输出工具——“表格”控件进行绑定。将
字符串与交互面板中输出工具——“文本框”控件进行绑定。点击运行按钮,触发 Trigger 算子。
运行结果
结果如下图所示,在交互面板中显示出两个字符串连接后的字符串列表和字符串。
ImagePoints
将 Concatenate 算子 类型 属性选择为 图像点,用于连接多个图像关键点坐标或者图像关键点坐标列表。
算子参数
输入数量/port_number:决定该算子的输入端口 input_? 的数量。取值范围:[0,10] 。默认值:2 。列表输入数量/list_port_number:决定该算子的输入端口 input_list_? 的数量。取值范围:[0,10] 。默认值:2 。
数据信号输入输出
输入:
image_points_?:数据类型:ImagePoints
输入内容:图像关键点坐标数据
image_points_list?:数据类型:ImagePointsList
输入内容:图像关键点坐标列表数据
输出:
图像点列表:数据类型:PointCloudList
输出内容:连接后的图像关键点坐标列表数据
功能演示
本节将使用 Concatenate 算子中 图像点 ,连接 2 个图像关键点坐标组成一个图像关键点坐标列表。
这与 Concatenate 算子中 关节属性的连接2个机器人关节弧度值方法相同,请参照该章节的功能演示。