Save 保存元素
Save 算子为保存元素,用于保存 Cube 、Image 、ImagePoints 、JointArray 、Path 、PointCloud 、PolyData 、Pose 、String 。
| 类型 | 功能 |
|---|---|
| Cube | 用于保存立方体。 |
| Image | 用于保存图像。 |
| ImagePoints | 用于保存图像关键点坐标。 |
| JointArray | 用于保存机器人关节弧度值。 |
| Path | 用于保存路径。 |
| PointCloud | 用于保存点云。 |
| PolyData | 用于保存多边形。 |
| Pose | 用于保存位姿。 |
| String | 用于保存字符串 |
Cube
将 Save 算子的 类型 属性选择 Cube ,用于保存立方体。
算子参数
文件/filename:保存立方体的文件名,如 cube.txt 。
数据信号输入输出
输入:
说明
根据需求选择 cube 或者 cube_list 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存立方体的文件名
立方体:数据类型:Cube
输入内容:立方体数据
立方体列表:数据类型:CubeList
输入内容:立方体列表数据
功能演示
使用 Save 算子中 立方体 ,保存立方体。
步骤1:算子准备
添加 Trigger 、Emit 、Save 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → 立方体
坐标 → 0 0 0 0 0 0
宽度 → 1
高度 → 1
深度 → 1
设置 Save 算子参数:
类型 → 立方体
文件→ cube.txt
步骤3:连接算子
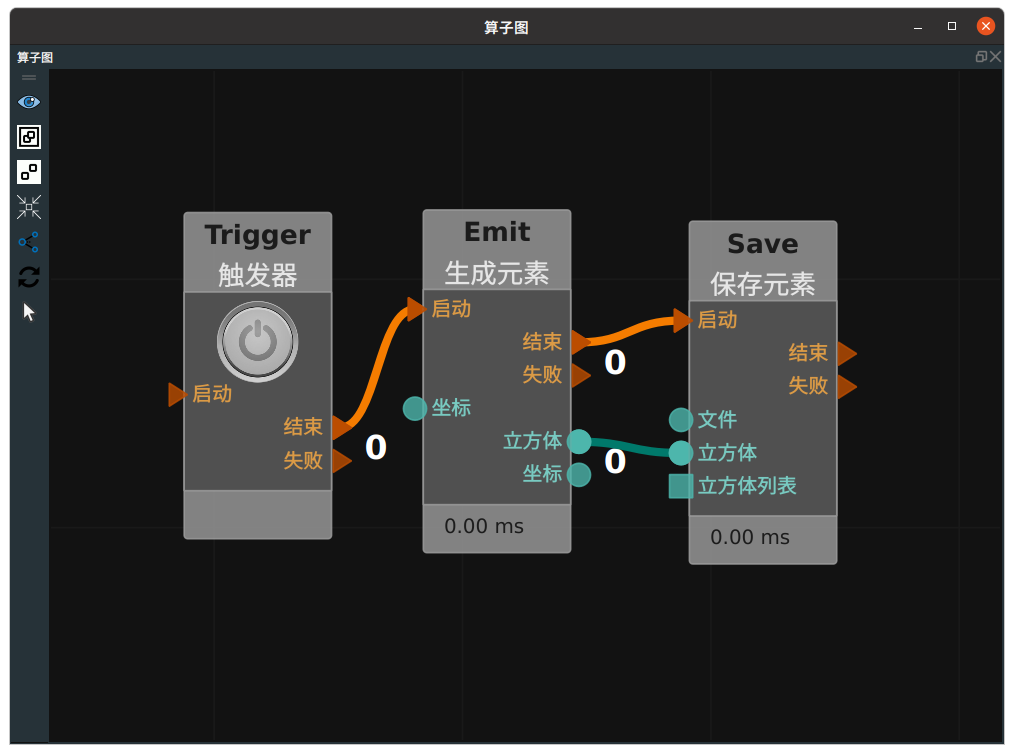
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
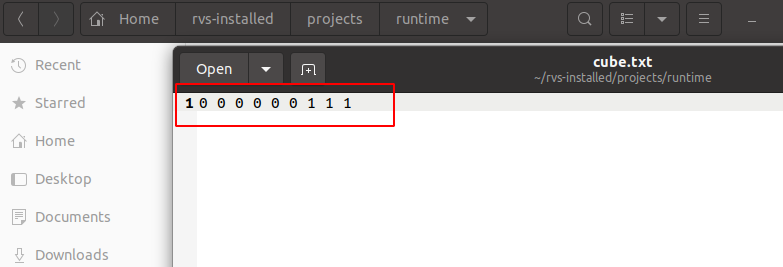
如下图所示,运行算子结束后,可以在runtime/下看到保存的cube.txt。
Image
将 Save 算子的 类型 属性选择图像,用于保存图像。
算子参数
文件/filename:保存 Image 的文件名。如 image.png 。
数据信号输入输出
输入:
说明
根据需求选择 image 或者 image_list 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存图像的文件名
图像:数据类型:Image
输入内容:图像数据
图像列表:数据类型:ImageList
输入内容:图像列表数据
功能演示
将 Save 算子中图像,保存图像。
步骤1:算子准备
添加 TyCameraResource、TyCameraAccess、Trigger、Save 算子至算子图。
说明
本章节使用到图漾相机资源,如学习此案例时没有相机可以使用 Load 算子完成案例。
步骤2:设置算子参数
设置 Save 算子参数:
类型 →图像
文件→ rgb.png
设置 TycameraAccess 算子参数:
彩色→
 可视
可视
步骤3:连接算子
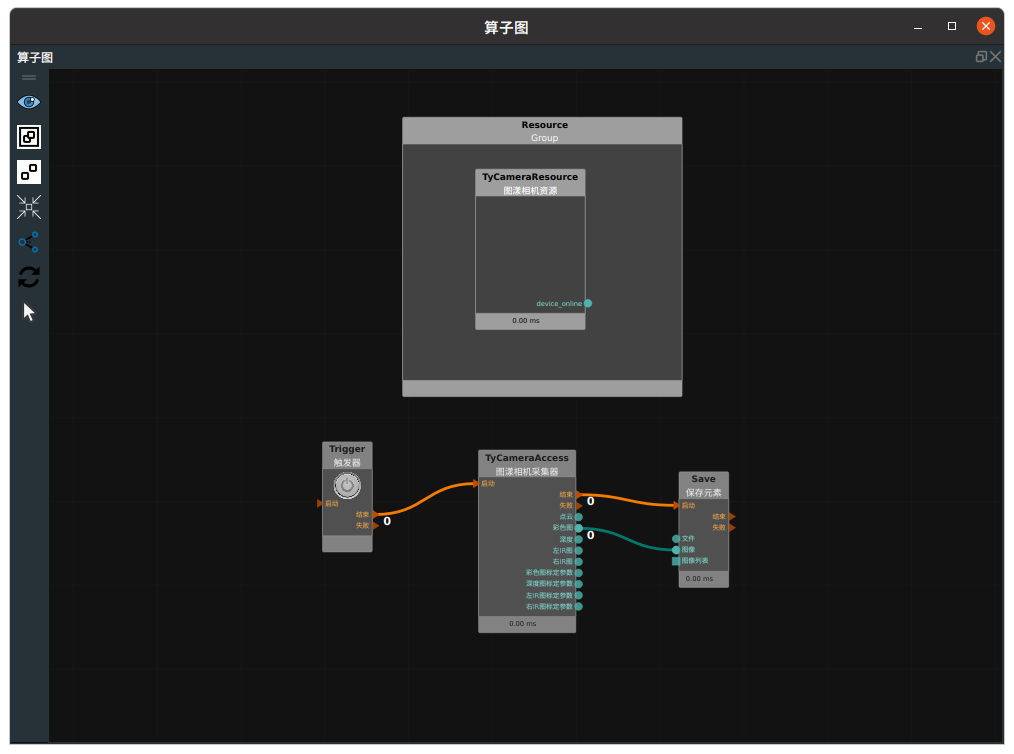
步骤4:运行
点击 RVS 运行按钮。
连接 TyCameraResource 相机资源。
触发 Trigger 算子。
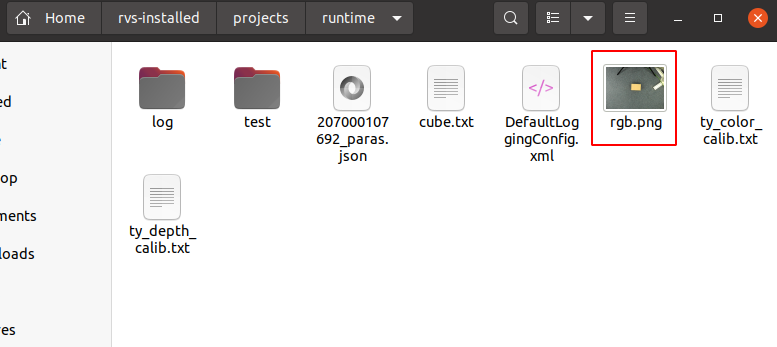
运行结果
如下图所示,运行算子结束后,在 runtime/ 下显示保存的 rgb.png 。
ImagePoints
将 Save 算子的 类型 属性选择图像点,用于保存图像关键点坐标。
算子参数
文件/filename:保存 imagepoints 的文件名。如 ImagePoints.txt 。
数据信号输入输出
输入:
说明
根据需求选择 image_points 或者 image_points_list 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存图像关键点坐标的文件名
图像点:数据类型:ImagePoints
输入内容:图像关键点数据
图像点列表:数据类型:ImagePointsList
输入内容:图像关键点坐标列表数据
功能演示
本节将使用 Save 算子中图像点 ,保存图像关键点坐标。这与 Save 算子中立方体属性进行保存立方体的方法相同,请参照该章节的功能演示。
设置 Emit 算子:类型→ 图像点,图像点 → 1 2 3 4 。
设置 Save 算子:类型 → 图像点,文件 → imagepoints.txt。
算子运行成功后,在 runtime/ 目录下保存 imagepoints.txt。

JointArray
将 Save 算子的 类型 属性选择关节,用于保存机器人关节弧度值。
算子参数
文件/filename:保存 jointarray 的文件名。如 joints.txt 。
数据信号输入输出
输入:
说明
据需求选择 jointarray 或者 jointarray_list 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存机器人关节值的文件名
关节:数据类型:JointArray
输入内容:机器人关节值数据
关节列表:数据类型:JointArrayList
输入内容:机器人关节值列表数据
功能演示
使用 Save 算子中 关节 ,保存机器人关节弧度值。
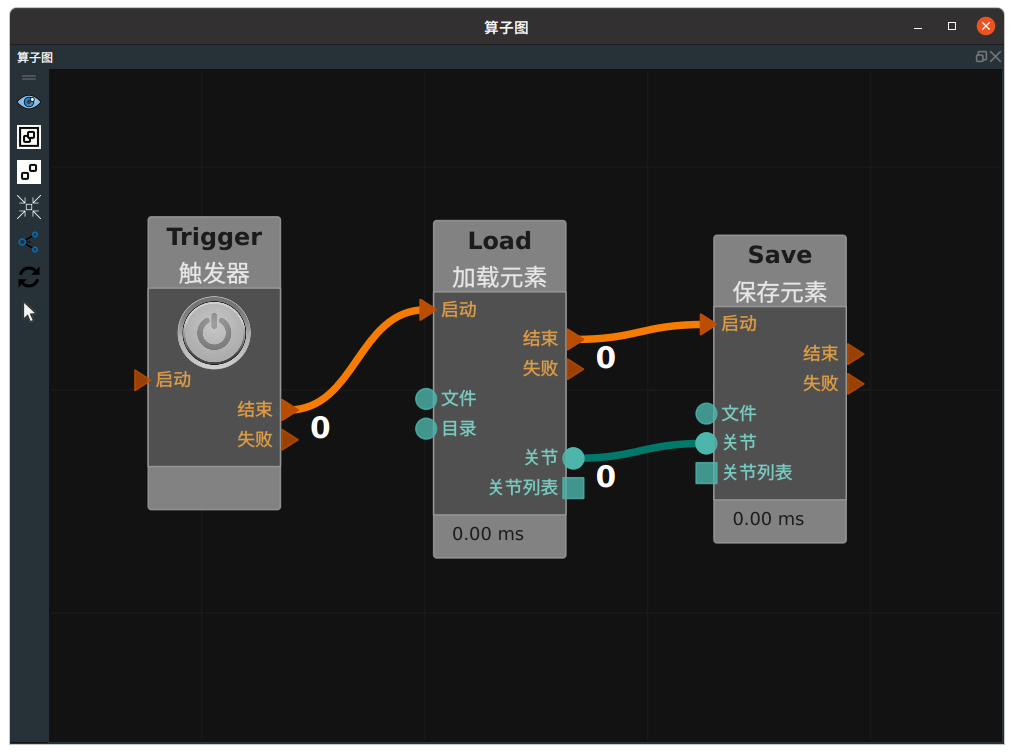
步骤1:算子准备
添加 Trigger 、Load 、Save 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 关节
文件 → 选择机器人关节弧度值( example_data/joints/joints.txt )
设置 Save 算子参数:
类型 → 关节
文件→ joints.txt
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,运行算子结束后,在runtime/下显示保存的joints.txt。
Path
将 Save 算子的 类型 属性选择路径,用于保存路径。
算子参数
文件/filename:保存 path 的文件名。如 path.txt 。
数据信号输入输出
输入:
说明
根据需求选择 path 或者 path_list 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存 path 的文件名
路径:数据类型:Path
输入内容:path 数据
路径列表:数据类型:PathList
输入内容:path 列表数据
功能演示
本节将使用 Save 算子中路径,保存路径。这与 Save 算子中 关节 属性进行保存机器人关节弧度值的方法相同,请参照该章节的功能演示。
PointCloud
将 Save 算子的类型属性选择 点云 ,用于保存点云。
算子参数
文件/filename:保存点云的文件名。如 pointcloud.pcd 。format:binary:使用二进制格式。
ascii:使用 ascii 格式。
数据信号输入输出
输入:
说明
根据需求选择 pointcloud 或者 pointcloud_list 其中一种信号输入即可。
filename:数据类型:String
输入内容:保存点云的文件名
点云:数据类型:PointCloud
输入内容:点云数据
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
功能演示
本节将使用 Save 算子中点云,用于保存点云,这与 Save 算子中 图像 属性保存相机图像的方法相同的方法相同,请参照该章节的功能演示。
PolyData
将 Save 算子的 类型 属性选择多边形,用于保存 3D 模型。
算子参数
文件/filename:保存 polydata 的文件名。如 polydata.obj 。支持的后缀格式:.obj 。
数据信号输入输出
输入:
说明
根据需求选择 polydata 或者 polydata_list 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存 polydata 的文件名
多边形:数据类型:PolyData
输入内容:polydata 数据
多边形列表:数据类型:PolyDataList
输入内容:polydata 列表数据
功能演示
本节将使用 Save 算子中 多边形 ,保存 3D 模型。这与 Save 算子中关节属性进行保存机器人关节弧度值的方法相同,请参照该章节的功能演示。
Pose
将 Save 算子的 类型 属性选择坐标,用于保存坐标。
算子参数
文件/filename:保存 pose 的文件名。如 pose.txt 。
数据信号输入输出
输入:
说明
根据需求选择 pose 或者 PoseList 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存 pose 的文件名
坐标:数据类型:Pose
输入内容:pose 数据
坐标列表:数据类型:PoseList
输入内容:pose 列表数据
功能演示
使用 Save 算子中坐标,保存坐标。这与 Save 算子中立方体属性保存立方体的方法相同,请参照该章节的功能演示。
String
将 Save 算子的 类型 属性选择 字符串 ,用于保存字符串。
算子参数
文件/filename:保存 string 的文件名。如 string.txt 。
数据信号输入输出
输入:
说明
根据需求选择 string 或者 string_list 其中一种信号输入即可。
文件:数据类型:String
输入内容:保存 string 的文件名
字符串:数据类型:String
输入内容:string 数据
字符串列表:数据类型:StringList
输入内容:string 列表数据
功能演示
本节将使用 Save 算子中 字符串 ,保存字符串。这与 Save 算子中 Cube 属性进行保存立方体的方法相同,请参照该章节的功能演示。