Emit 生成元素
Emit 算子为生成元素,用于生成单个 Angle 、CameraInfo 、Cube 、Cylinder 、Line 、Circle 、Object 、Pose 、Sphere 、String 、Text 、ImagePoints。
| 类型 | 功能 |
|---|---|
| 角 | 用于生成单个角。 |
| 相机信息 | 用于生成相机信息。 |
| 立方体 | 用于生成单个立方体。 |
| 圆柱体 | 用于生成单个圆柱体。 |
| 线段 | 用于生成单个线。 |
| 圆圈 | 用于生成单个圆。 |
| 物品 | 用于生成单个物体,可添加.mtl材质文件。 |
| 多边形 | 用于生成单个多边形。 |
| 坐标 | 用于生成单个 pose 。 |
| 球体 | 用于生成单个球体。 |
| 字符串 | 用于生成单个字符串。 |
| 文本 | 用于生成单个 3D 立体文字。 |
| 图像点 | 用于生成关键点坐标( x , y )。 |
| 矩阵 | 用于生成矩阵。 |
| 数值 | 用于生成数值。 |
角
将 Emit 算子的 类型 属性选择 角 ,用于生成单个角。
算子参数
p1:生成角度的 p1 点 pose 。p2:生成角度的 p2 点 pose 。p3:生成角度的 p3 点 pose 。夹角/angle:设置角度在 3D 视图中的可视化属性。 打开角度可视化。
打开角度可视化。 关闭角度可视化。
关闭角度可视化。 设置角度的颜色。取值范围:[-2,360] 。默认值:60 。
设置角度的颜色。取值范围:[-2,360] 。默认值:60 。 设置角的线宽。取值范围:[1,100] 。默认值:4 。
设置角的线宽。取值范围:[1,100] 。默认值:4 。 标注角显示。
标注角显示。
数据信号输入输出
输入:
角:数据类型:Angle
输入内容:angle 数据
输出:
角:数据类型:Angle
输出内容:angle 数据
功能演示
使用 Emit 算子中 角 ,生成单个空间角。
步骤1:算子准备
添加 Trigger 、Emit 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → 角
P1 → 0 0 0 0 0 0
P2 → 0 1 0 0 0 0
p3 → 0 0 1 0 0 0
夹角 →
可视 → 打开
步骤3:连接算子
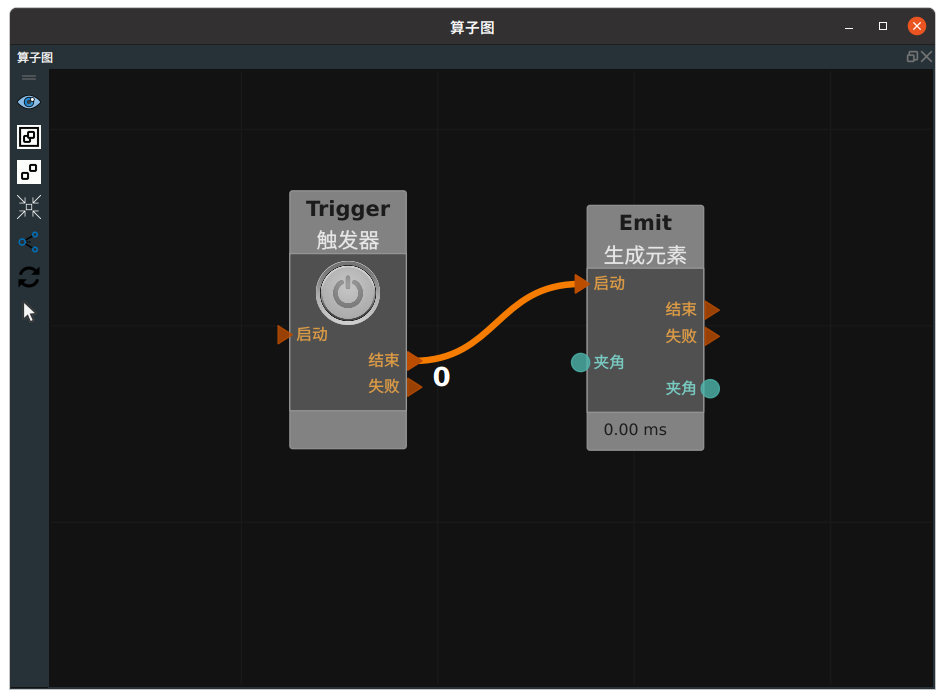
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
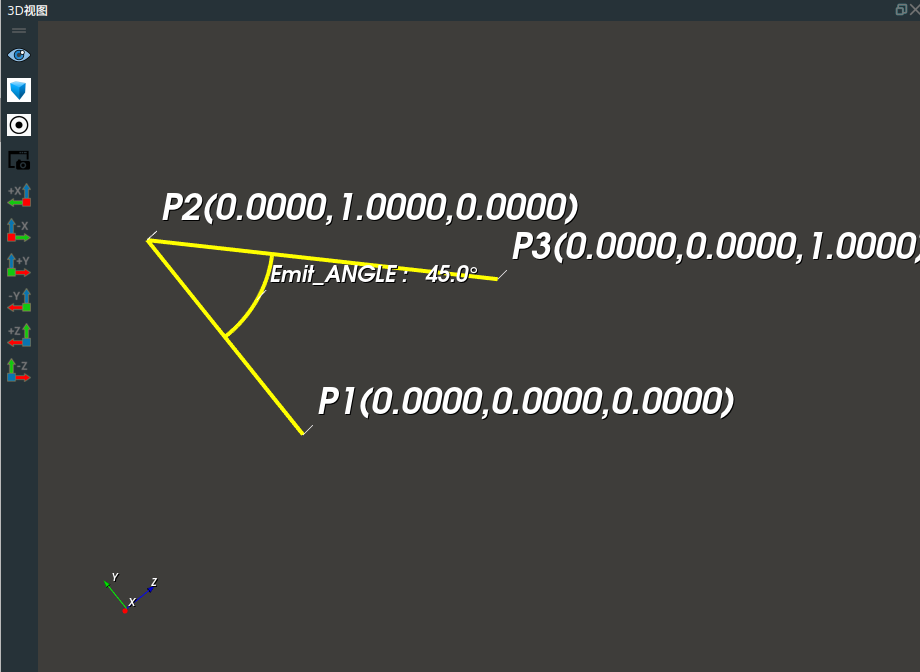
运行结果
如下图所示,3D 视图中显示生成空间角的角度和三个点的标注。
相机信息
将 Emit 算子的 类型 属性选择相机信息,用于生成相机信息。
算子参数
相机名称:设置生成相机信息的名称。默认值:Camera_0。相机视场宽度/camera_width:设置相机视野中水平方向范围。默认值:848。相机视场高度/camera_height:设置相机视野中垂直方向的范围。默认值:480。相机视角/camera_angle:设置相机拍摄或观察场景时的视野角度。默认值:42.625。相机坐标/camera_pose:设置相机拍摄场景的位置。相机信息/camera_info:设置相机信息在 3D 视图中的可视化属性。- 打开相机信息可视化。
- 关闭相机信息可视化。
相机信息比例/camera_info_sacle:设置相机信息在3D 视图中的比例显示。默认值:0.1。
数据信号输入输出
输出:
相机信息:数据类型:CameraInfo
输出内容:相机信息
功能演示
使用 Emit 算子中 相机信息 ,生成单个相机信息。
步骤1:算子准备
添加 Trigger 、Emit 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → 相机信息
相机信息 →
可视其余参数保持默认值。
步骤3:连接算子
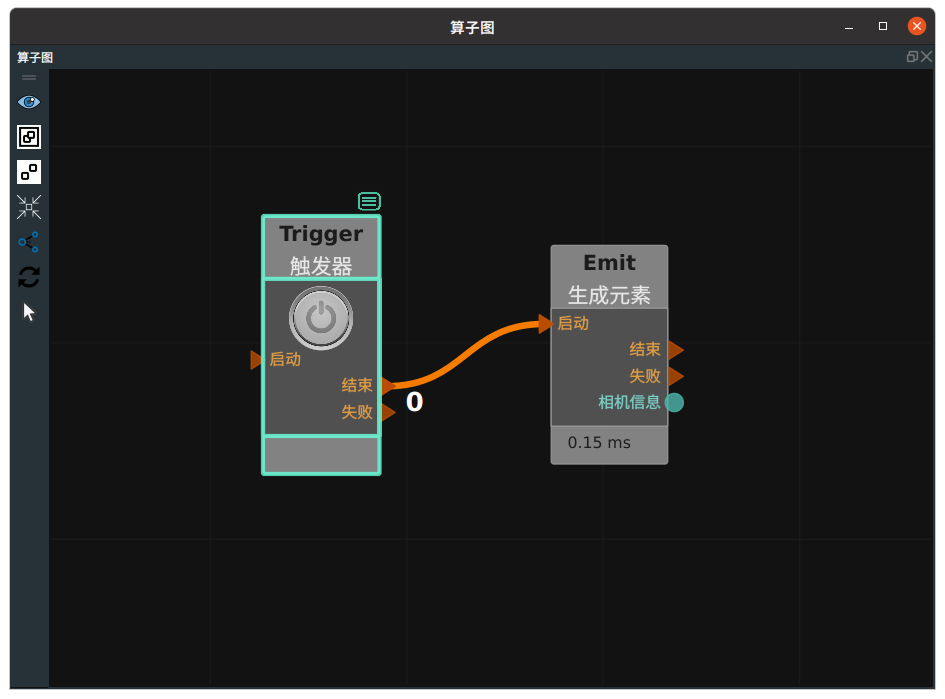
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
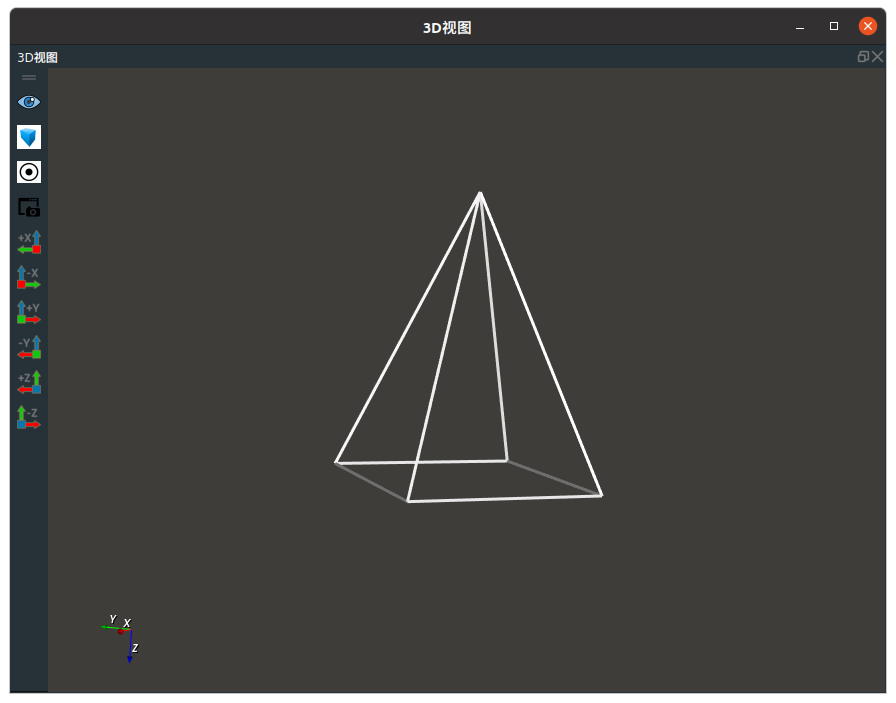
运行结果
如下图所示,3D 视图中显示生成的相机信息。
立方体
将 Emit 算子的 类型 属性选择 Cube ,用于生成单个立方体。
算子参数
坐标/pose: 立方体中心点 pose 的 x y z rx ry rz 。宽度/width:立方体的宽。pose 的 X 轴方向。高度/height:立方体的高。pose 的 Y 轴方向。深度/depth:立方体的长。pose 的 Z 轴方向。立方体/cube:设置立方体在 3D 视图中的可视化属性。- 打开立方体可视化。
- 关闭立方体可视化。
- 设置立方体的颜色。取值范围:[-2,360] 。默认值:-2 。
 设置立方体的透明度。取值范围:[0,1] 。默认值:0.5 。
设置立方体的透明度。取值范围:[0,1] 。默认值:0.5 。
坐标/pose:设置 pose 在 3D 视图中的可视化属性。- 打开 pose 可视化。
- 关闭 pose 可视化。
 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
坐标:数据类型:Pose
输入内容:pose 数据
输出:
立方体:数据类型:Cube
输出内容:cube 数据
坐标:数据类型:Pose
输出内容:pose 数据
功能演示
本节将使用 Emit 算子中 Cube ,生成单个立方体。这与 Emit 算子中 Angle 属性生成单个角的方法相同,请参照该章节的功能演示。
圆柱体
将 Emit 算子的 类型 属性选择圆柱体,用于生成单个圆柱体。
算子参数
坐标/pose:圆柱体的中心点 pose 的 x y z rx ry rz 。半径/radius:圆柱体的圆的半径 。默认值:0.075。长度/length:圆柱体的长 。默认值:0.4。圆柱体/cylinder:设置圆柱体在3D视图中的可视化属性。- 打开圆柱体可视化。
- 关闭圆柱体可视化。
- 设置圆柱体的颜色。取值范围:[-2,360] 。默认值:-2 。
坐标/pose:设置 pose 在 3D 视图中的可视化属性。- 打开 pose 可视化。
- 关闭 pose 可视化。
- 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
坐标:数据类型:Pose
输入内容:pose 数据
输出:
圆柱体:数据类型:Cylinder
输出内容:cylinder 数据
坐标:数据类型:Pose
输出内容:pose 数据
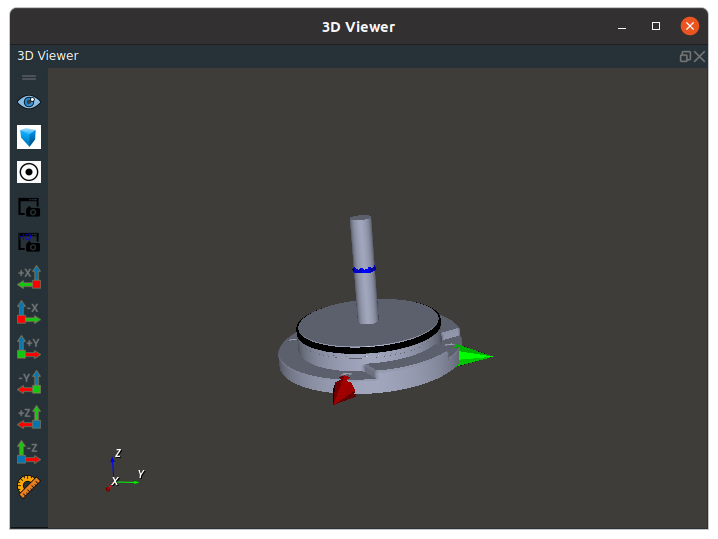
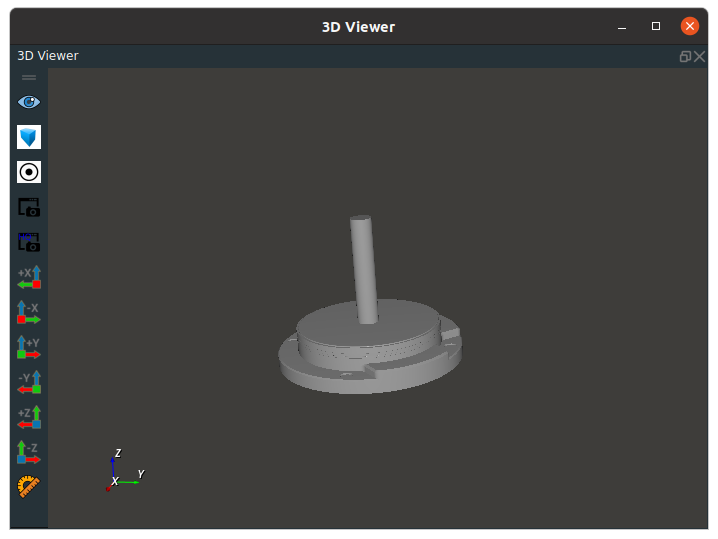
功能演示
本节将使用 Emit 算子中圆柱体 ,生成单个圆柱体。这与 Emit 算子中角属性生成单个角的方法相同,请参照该章节的功能演示。
线段
将 Emit 算子的 类型 属性选择线段,用于生成单条线。
算子参数
取反/inverse:两个点取反。True:line 数据输出端口结果:p2 <->p1。False:line 数据输出端口结果:p1 <->p2。
p1:生成线的 p1 点 pose 。p2:生成线的 p2 点 pose 。线段/line:设置线条在 3D 视图中的可视化属性。- 打开线条可视化。
- 关闭线条可视化。
- 设置线条的颜色。取值范围:[-2,360] 。默认值:60 。
- 设置线条的线宽。取值范围:[1,100] 。默认值:1 。
数据信号输入输出
输入:
线段:数据类型:Line
输入内容:line 数据(2个 pose 组成的空间线段)。
p1:数据类型:Pose
输入内容:pose 数据
p2:数据类型:Pose
输入内容:pose 数据
输出:
线段:数据类型:Line
输出内容:line 数据
功能演示
本节将使用 Emit 算子中 线段 ,生成单条线。这与 Emit 算子中 角属性生成单个角的方法相同,请参照该章节的功能演示。
圆圈
将 Emit 算子的 类型 属性选择圆圈,用于生成单个圆。
算子参数
坐标/pose:圆的中心点 pose 的 x y z rx ry rz。半径/radius:圆的半径 。圆圈/circle:设置圆在 3D 视图中的可视化属性。- 打开圆可视化。
- 关闭圆可视化。
- 设置圆的颜色。取值范围:[-2,360] 。默认值:-2 。
数据信号输入输出
输入:
圆圈:数据类型:Circle
输入内容:circle 数据
坐标:数据类型:Pose
输入内容:pose 数据
输出:
圆圈:数据类型:circle
输出内容:circle 数据
功能演示
本节将使用 Emit 算子中 圆圈,生成单个圆。这与 Emit 算子中角属性生成单个角的方法相同,请参照该章节的功能演示。
物品
将 Emit 算子的 类型 属性选择 物品 ,用于生成单个物体,生成的物体可显示 .mtl 材质文件。
算子参数
文件/file:生成物体的文件名 。坐标/pose:生成物体的坐标。比例/scale:设置物体在 3D 视图中的显示比例。默认值:1。物体/object:设置物体在 3D 视图中的可视化属性。- 打开物体可视化。
- 关闭物体可视化。
坐标/pose:设置物体坐标在 3D 视图中的可视化属性。- 打开坐标可视化。
- 关闭坐标可视化。
- 设置坐标的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
坐标:数据类型:Pose
输入内容:坐标数据
文件:数据类型:String
输入内容:物体的文件名
输出:
物体:数据类型:Object
输出内容:生成的物体数据
坐标:数据类型:Pose
输出内容:生成的物体坐标
功能演示
本节将使用 Emit 算子中 物品 ,生成单个物体。这与 Emit 算子中 Angle 属性生成单个角的方法相同,请参照该章节的功能演示。
多边形
将 Emit 算子的 类型属性选择 多边形,用于生成单个多边形。
算子参数
文件/file:生成多边形的文件名 。坐标/pose:生成多边形的坐标。多边形/polydata:设置多边形在 3D 视图中的可视化属性。- 打开多边形可视化。
- 关闭多边形可视化。
点云/cloud:设置多边形在 3D 视图中的可视化属性。- 打开多边形点云可视化。
- 关闭多边形点云可视化。
数据信号输入输出
输入:
坐标:数据类型:Pose
输入内容:坐标数据
文件:数据类型:
输入内容:多边形的文件名
输出:
多边形:数据类型:PolyData
输出内容:生成的多边形数据
点云:数据类型:Cloud
输出内容:生成的多边形点云
功能演示
本节将使用 Emit 算子中 多边形 ,生成单个多边形。这与 Emit 算子中 角 属性生成单个角的方法相同,请参照该章节的功能演示。
坐标
将 Emit 算子的 类型 属性选择坐标 ,用于生成单个坐标。
算子参数
坐标/pose: pose 的 x y z rx ry rz。坐标/pose:设置 pose 在 3D 视图中的可视化属性。- 打开 pose 可视化。
- 关闭 pose 可视化。
- 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
倒置坐标/inverse_pose:设置逆 pose 在 3D 视图中的可视化属性。参数值描述 与 pose 一致。
数据信号输入输出
输入:
坐标:数据类型:Pose
输入内容:pose 数据
输出:
坐标:数据类型:Pose
输出内容:pose 数据
倒置坐标:数据类型:Pose
输出内容:倒置 pose 数据
功能演示
本节将使用 Emit 算子中 坐标 ,生成单个坐标。这与 Emit 算子中 角属性生成单个角的方法相同,请参照该章节的功能演示。
球体
将 Emit 算子的 类型 属性选择球体 ,用于生成单个球体。
算子参数
坐标/pose:生成球体的中心点 pose 的 x y z rx ry rz 。半径/radius:生成球体的半径。球体/sphere:设置球体在 3D 视图中的可视化属性。- 打开球体可视化。
- 关闭球体可视化。
- 设置球体的颜色。取值范围:[-2,360] 。默认值:-2 。
- 设置球体的透明度。取值范围:[0,1] 。默认值:0.8 。
坐标/pose:设置 pose 在 3D 视图中的可视化属性。- 打开 pose 可视化。
- 关闭 pose 可视化。
- 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
坐标:数据类型:Pose
输入内容:坐标数据
输出:
球体:数据类型:Sphere
输出内容:sphere 数据
坐标:数据类型:Pose
输出内容:坐标数据
功能演示
本节将使用 Emit 算子的类型 属性选择 坐标,生成单个球体。这与 Emit 算子中 角属性生成单个角的方法相同,请参照该章节的功能演示。
字符串
将 Emit 算子的 类型 属性选择字符串 ,用于生成字符串。
算子参数
字符串/string:字符串内容。文件/filename:文件名。目录/directory:文件目录名。字符串/string:设置字符串曝光属性。打开后可与交互面板中输出工具——“文本框”控件进行绑定。- 打开曝光。
- 关闭曝光。
文件/filename:设置文件名曝光属性。打开后可与交互面板中输出工具——“文本框”控件进行绑定。参数值描述与 string 一致。目录/directory:设置文件目录名曝光属性。打开后可与交互面板中输出工具——“文本框”控件进行绑定。参数值描述与 string 一致。
数据信号输入输出
输入:
字符串:数据类型:String
输入内容:String 数据
输出:
字符串:数据类型:String
输出内容:string 数据
文件:数据类型:String
输出内容:string 数据
目录:数据类型:String
输出内容:string 数据
功能演示
使用 Emit 算子中 字符串,输入string、filename、directory,分别与交互面板中“文本框”控件进行绑定。
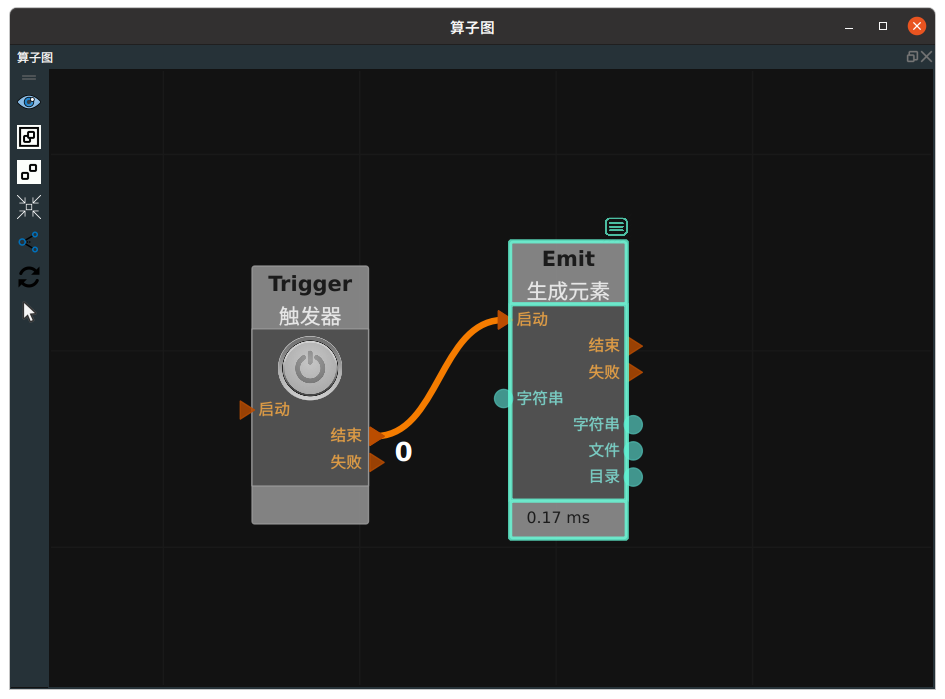
步骤1:算子准备
添加 Trigger 、Emit 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → 字符串
字符串 → RVS
文件 →
 → 选择文件名( example_data/cube/cube.txt )
→ 选择文件名( example_data/cube/cube.txt )目录 → 选择文件目录名 ( example_data/cube )
字符串 →
曝光文件 →
曝光目录 →
曝光
步骤3:连接算子
步骤4:运行
鼠标右键交互面板空白处 → 解锁,拖出输出工具中三个——“文本框”控件。
鼠标右键交互面板空白出 → 点击锁定,鼠标中键点击拖出的“文本框”,依次将三个曝光属性进行绑定。
点击 RVS 运行按钮,触发 Trigger 算子。
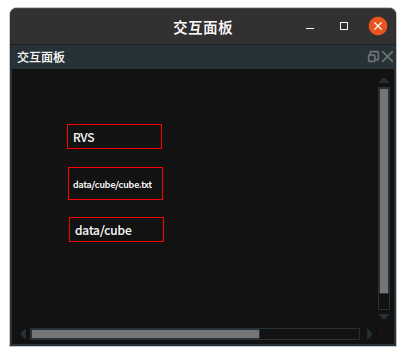
运行结果
结果如下图所示, 交互面板中分别显示算子参数 string、filename、directory 中的内容。
文本
将 Emit 算子的 类型 属性选择 文本 ,用于生成单个 3D 立体文字。
算子参数
文本/text:生成 3D 立体文字的内容。坐标/pose: text 的 pose 的 x y z rx ry rz 。文本/text:设置文字在 3D 视图中的可视化属性。- 打开文字可视化。
- 关闭文字可视化。
- 设置文字的颜色。取值范围:[ -2,360 ]。默认值:-1 。
- 设置文字的尺寸大小。取值范围:[0,99.99] 。默认值:0.05 。
数据信号输入输出
输入:
字符串:数据类型:String
输入内容:String 数据
坐标:数据类型:Pose
输入内容:pose 数据
输出:
文本:数据类型:Text
输出内容:text 数据
功能演示
本节将使用 Emit 算子中 文本 ,生成单个 3D 立体文字。这与 Emit 算子中 角 属性生成单个角的方法相同,请参照该章节的功能演示。
使用 Emit 算子中:类型 → 文本。
设置 Emit 算子参数:文本 → RVS
算子运行成功后,在 3D 视图中显示 text——“RVS” 。

图像点
将 Emit 算子的 类型 属性选择 图像点 ,用于生成图像关键点坐标( x , y )。
算子参数
图像点/points:生成的图像关键点坐标,可以填单组或多组图像关键点坐标。
注解
这里数值需要填写偶数个。输入内容:x1 y1 x2 y2…..
数据信号输入输出
输入:
字符串:数据类型:string
输入内容:string 数据
输出:
图像点:数据类型:ImagePoints
输出内容:图像关键点数据
功能演示
使用 Emit 算子中 图像点 ,生成单个 2D 数据关键点列表。
步骤1:算子准备
添加 Trigger 、Emit 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → 图像点
图像点 → 1 2 3 4
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
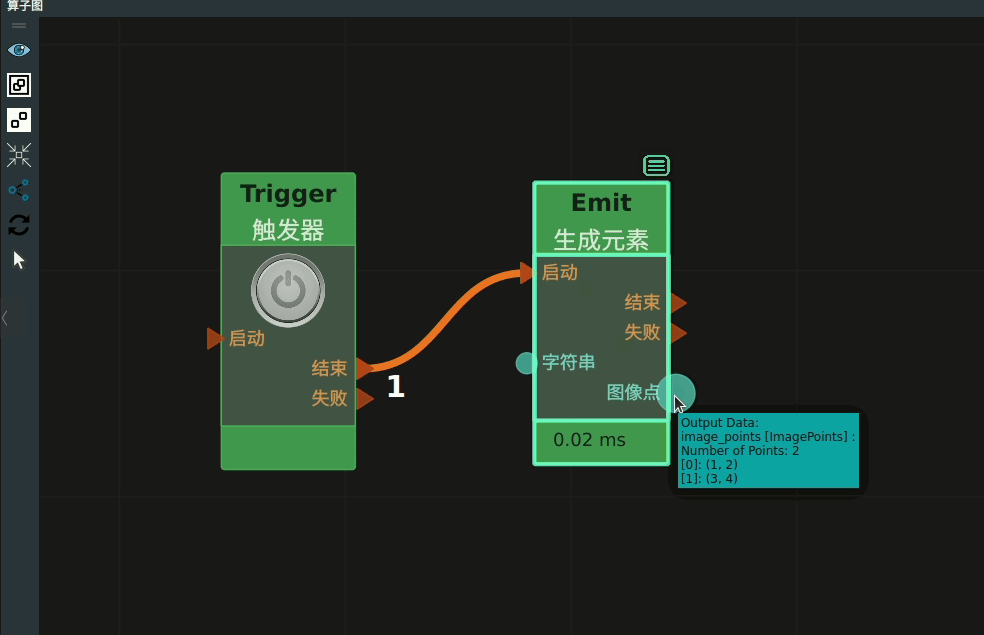
运行结果
结果如下图所示,Emit 算子右侧 points 输出端口输出两组关键点坐标。
矩阵
将 Emit 算子的 类型 属性选择 矩阵 ,用于生成矩阵。
算子参数
行数/rows:生成矩阵的行数。列数/cols:生成矩阵的列数。值/value:生成矩阵中每个元素的值。
注解
输入数值内容格式:value1 value2 value3 value4…..
数据信号输入输出
输入:
字符串:数据类型:String
输入内容:string 数据
输出:
矩阵:数据类型:Matrix
输出内容:矩阵
功能演示
与 Emit 算子中 图像点属性生成图像点的方法相同,请参照该章节的功能演示。
数值
将 Emit 算子的 类型 属性选择 数值 ,用于生成 数值类型数据。
算子参数
值/value:生成的数值。
数据信号输入输出
输入:
字符串:数据类型:String
输入内容:string 数据
输出:
数值:数据类型:Number
输出内容:数值类型数据
功能演示
与 Emit 算子中 图像点属性生成图像点的方法相同,请参照该章节的功能演示。