Foreach 遍历元素
Foreach 算子为遍历元素列表,用于遍历 Cube 、Image 、JointArray 、MotionPlan 、Path 、PlannedGrasp 、PointCloud 、Pose 、String 、ImagePoints列表。
| 类型 | 功能 |
|---|---|
| Cube | 用于遍历立方体列表。 |
| Image | 用于遍历图像列表。 |
| JointArray | 用于遍历机器人关节弧度值列表。 |
| MotionPlan | 用于遍历路径规划列表。 |
| Path | 用于遍历路径列表。 |
| PlannedGrasp | 用于遍历抓取策略列表。 |
| PointCloud | 用于遍历点云列表。 |
| Pose | 用于遍历 pose 列表。 |
| String | 用于遍历字符串列表。 |
| ImagePoints | 用于遍历图像关键点坐标列表。 |
| RotatedRect | 用于遍历旋转矩形列表。 |
Cube
将 Foreach 算子的 类型 属性选择 Cube ,用于遍历 Cube 列表。
算子参数
启动便迭代/iterate_at_start:数据类型:Bool 。使能/去使能迭代触发。True:当算子左侧 start 端口被触发时,会自动触发一次 iterate ,此时会输出当前计数序号对应的数据,然后右侧 iterate 被触发,计数序号自加 1 。
False:当算子左侧 start 端口被触发时,iterate 不会被触发。
最大迭代次数/max_iteration:计数序号的最大迭代次数。输入的数值表示最大迭代几次。默认值: -1 ,表示迭代整个列表。下限/lower_bound:表示迭代计数的最小边界值。默认值:0 。表示从列表第一个开始迭代。最小值:0。上限/upper_bound:表示迭代计数的最大边界值。默认值:-1 。表示 size-1 ,为列表最后一个。立方体/cube:设置立方体在 3D 视图中的可视化属性。 打开立方体可视化。
打开立方体可视化。 关闭立方体可视化。
关闭立方体可视化。 设置立方体的颜色。取值范围:[-2,360] 。默认值:-2。
设置立方体的颜色。取值范围:[-2,360] 。默认值:-2。 设置立方体的透明度。取值范围:[0,1] 。默认值:0.5 。
设置立方体的透明度。取值范围:[0,1] 。默认值:0.5 。
数据信号输入输出
输入:
立方体列表:数据类型:CubeList
输入内容:立方体数据列表
输出:
立方体:数据类型:Cube
输出内容:单个立方体数据
功能演示
使用 Foreach 算子中立方体,遍历输出加载 cube_list 里的 cube 数据。
步骤1:算子准备
添加 Trigger(2个) 、Load 、Foreach 、算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → 立方体
目录 →
 → 选择 cube 文件目录名( example_data/cube )
→ 选择 cube 文件目录名( example_data/cube )
设置 Foreach 算子参数:
类型 → 立方体
立方体 →
可视
步骤3:连接算子
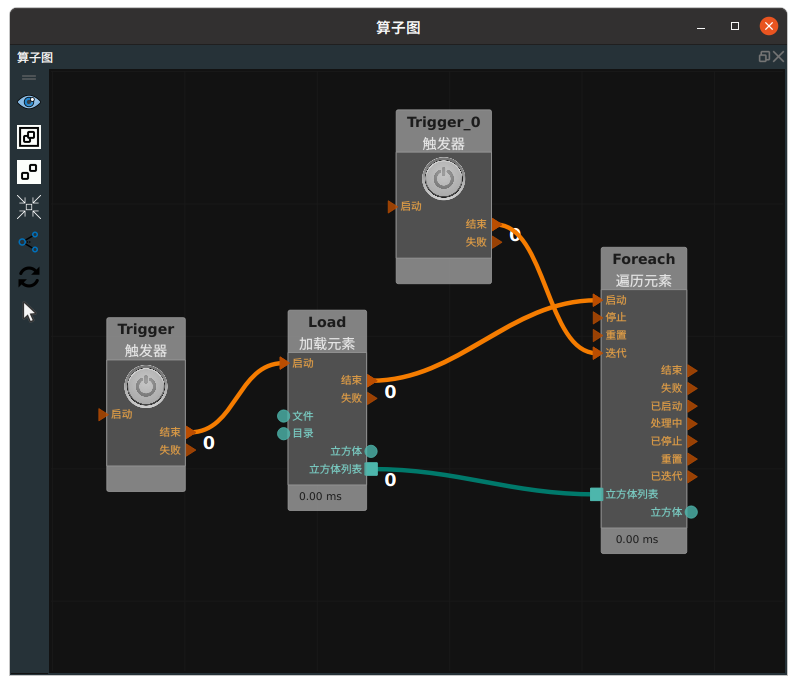
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子,再触发 Trigger_0 。
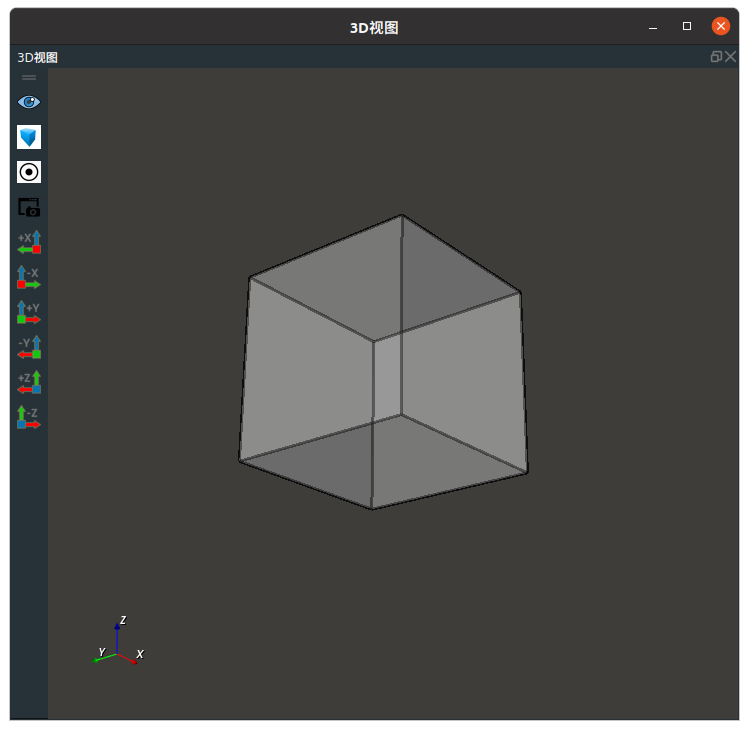
运行结果
如下图所示,在 3D 视图中显示当前遍历的 cube 。
Image
将 Foreach 算子的 类型 属性选择 图像,用于遍历图像列表。
算子参数
其余参数:同本算子 Cube 章节——算子参数。图像:设置图像在 2D 视图中的可视化属性。- 打开图像可视化。
- 关闭图像可视化。
数据信号输入输出
输入:
图像列表:数据类型:ImageList
输入内容:图像列表数据
输出:
图像:数据类型:Image
输出内容:单个图像数据
功能演示
与 Foreach 算子中 Cube 属性遍历立方体列表的方法相同,请参照该章节的功能演示。
JointArray
将 Foreach 算子的 类型 属性选择关节,用于遍历机器人关节弧度值。
算子参数
所有参数:同本算子 Cube 章节——算子参数。
数据信号输入输出
输入:
关节列表:数据类型:JointArrayList
输入内容:jointarray 列表数据
输出:
joint:数据类型:JointArrayList
输出内容:jointarray 数据
功能演示
与 Foreach 算子中 Cube 属性遍历立方体列表的方法相同,请参照该章节的功能演示。
Path
将 Foreach 算子的 类型 属性选择路径,用于遍历机器人路径。
算子参数
其余参数:同本算子 Cube 章节——算子参数。path:设置路径在 3D 视图中的可视化属性。- 打开路径可视化。
- 关闭路径可视化。
 设置路径的线宽。默认值:1 。
设置路径的线宽。默认值:1 。
数据信号输入输出
输入:
路径列表:数据类型:PathList
输入内容:路径列表数据
输出:
路径:数据类型:Path
输出内容:单个路径数据
功能演示
与 Foreach 算子中 Cube 属性遍历立方体列表的方法相同,请参照该章节的功能演示。
PointCloud
将 Foreach 算子的 类型 属性选择点云,用于遍历点云。
算子参数
其余参数:同本算子 Cube 章节——算子参数。点云:设置当前遍历的点云在 3D 视图中的可视化属性。- 打开点云可视化。
- 关闭点云可视化。
- 设置3D视图中点云的颜色。取值范围:[-2,360] 。默认值:-1 。
 设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
设置点云中点的尺寸。取值范围:[1,50] 。默认值:1 。
数据信号输入输出
输入:
点云列表:数据类型:PointCloudList
输入内容:点云列表数据
输出:
点云:数据类型:PointCloud
输出内容:单个点云数据
功能演示
与 Foreach 算子中 Cube 属性遍历立方体列表的方法相同,请参照该章节的功能演示。
Pose
将 Foreach 算子的 类型 属性选择坐标,用于遍历 pose 。
算子参数
其余参数:同本算子 Cube 章节——算子参数。坐标:设置当前遍历的 pose 在 3D 视图中的可视化属性。- 打开 pose 可视化。
- 关闭 pose 可视化。
- 设置 pose 的尺寸大小。取值范围:[0.001,10] 。默认值:0.1 。
数据信号输入输出
输入:
坐标列表:数据类型:PoseList
输入内容:pose 列表数据
输出:
坐标:数据类型:Pose
输出内容:单个 pose 数据
功能演示
与 Foreach 算子中 Cube 属性遍历立方体列表的方法相同,请参照该章节的功能演示。
String
将 Foreach 算子的 类型 属性选择字符串,用于遍历字符串。
算子参数
其余参数:同本算子 Cube 章节——算子参数。字符串:设置当前遍历的 string 的曝光属性。打开后可与交互面板中输出工具——“文本框”控件绑定- 打开曝光。
- 关闭曝光。
数据信号输入输出
输入:
字符串列表:数据类型:String
输入内容:String 列表数据
输出:
字符串:数据类型:String
输出内容:单个 String 数据
功能演示
使用 Foreach 算子中字符串,遍历目录中的子目录。
步骤1:算子准备
添加 Trigger(2个) 、DirectoryOperation 、Foreach 算子至算子图。
步骤2:设置算子参数
设置 DirectoryOperation 算子参数:
类型 → ReadDirectory
父目录 →
→ 选择 example_data 文件目录名( example_data )
设置 Foreach 算子参数:
类型 → 字符串
字符串 →
曝光
步骤3:连接算子
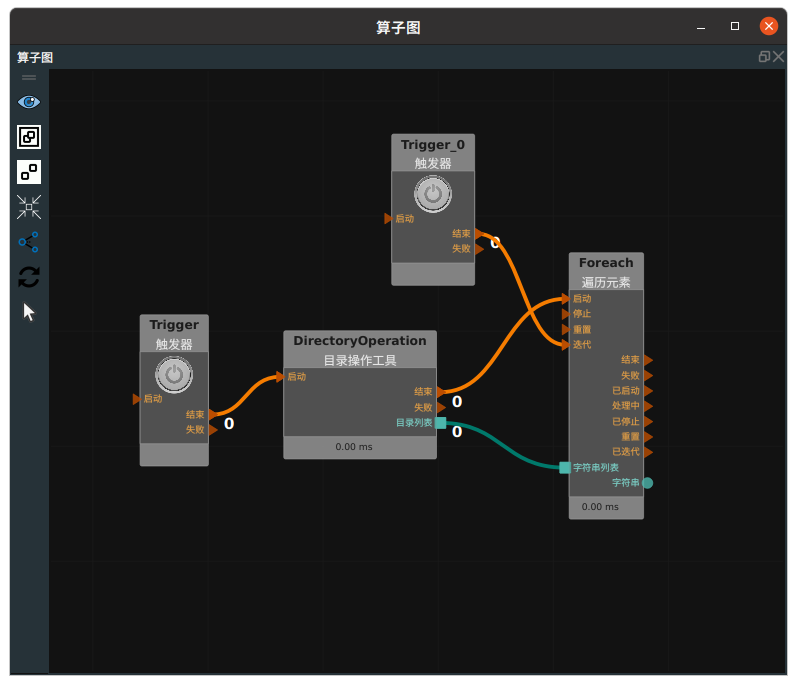
步骤4:运行
将在
字符串属性与交互面板中输出工具——“文本框”控件进行绑定。点击 RVS 运行按钮,触发 Trigger 算子。
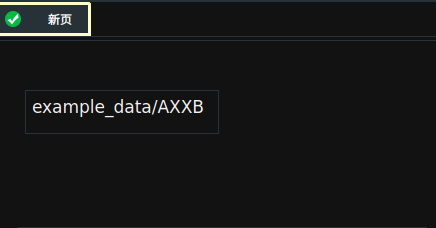
运行结果
结果如下图所示, 交互面板中显示当前遍历的子目录名。
ImagePoints
将 Foreach 算子的 类型 属性选择 图像点 ,用于遍历图像关键点坐标 。
算子参数
所有参数:同本算子 Cube 章节——算子参数。
数据信号输入输出
输入:
图像点列表:数据类型:ImagePoints
输入内容:ImagePoints 列表数据
输出:
图像点:数据类型:ImagePoints
输出内容:单组 ImagePoints 数据
功能演示
与 Foreach 算子中 Cube 属性遍历立方体列表的方法相同,请参照该章节的功能演示。