PoseToElement 坐标转元素
PoseToElement 算子为坐标转元素,基于 pose 或 poselist 转成对应的数据类型或列表,适用于 Cube 、Cylinder 、Circle 、Object 、Path 、Sphere 、Text 。
| 类型 | 功能 |
|---|---|
| Cube | Pose 转 Cube 。 |
| Cylinder | Pose 转 Cylinder 。 |
| Circle | Pose 转 Circle 。 |
| Object | Pose 转 Object 。 |
| Path | Pose_list 转 Path 。 |
| Sphere | Pose 转 Sphere 。 |
| String | Pose 转 String。 |
| Text | Pose 转 Text 。 |
Cube
将 PoseToElement 算子的 类型 属性选择 Cube ,用于将 Pose 转 Cube 。
算子参数
宽度/width:立方体的宽。pose 的 X 轴方向。高度/height:立方体的高。pose 的 Y 轴方向。深度/depth:立方体的长。pose 的 Z 轴方向。立方体/cube:设置立方体在 3D 视图中的可视化属性。 打开立方体可视化。
打开立方体可视化。 关闭立方体可视化。
关闭立方体可视化。 设置立方体的颜色。取值范围:[-2,360] 。默认值:-2 。
设置立方体的颜色。取值范围:[-2,360] 。默认值:-2 。 设置立方体的透明度。取值范围:[1,10] 。默认值:0.5 。
设置立方体的透明度。取值范围:[1,10] 。默认值:0.5 。
立方体列表/cube_list:设置立方体列表在 3D 视图中的可视化属性。参数值描述与立方体一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:单个 pose 数据
pose_list:数据类型:PoseList
输入内容:pose 数据列表
输出:
cube:数据类型:Cube
输出内容:单个 cube 数据
cube_list:数据类型:CubeList
输出内容:cube 数据列表
功能演示
将 PoseToElement 算子的 类型 属性选择 Cube ,将 Pose 转成立方体元素 。
步骤1:算子准备
添加 Trigger 、Emit 、PoseToElement 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → pose
坐标 →0 0 0 0 0 0
设置 PoseToElement 算子参数:
类型 → Cube
立方体→
可视
步骤3:连接算子
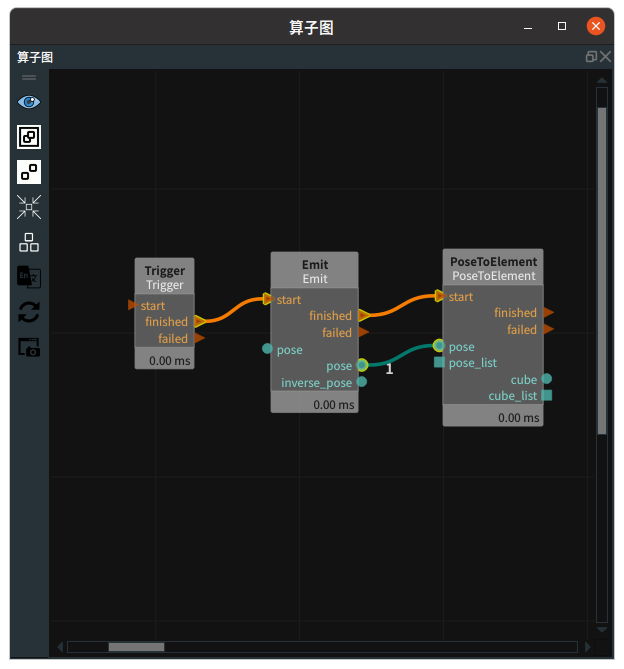
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,在 3D 视图中显示转成的立方体元素。
Cylinder
将 PoseToElement 算子的 类型 属性选择 Cylinder ,用于将 Pose 转 Cylinder 。
算子参数
半径/radius:设置圆柱体的半径。长度/length:设置圆柱体的高。圆柱体/cylinder:设置圆柱体在 3D 视图中的可视化属性。- 打开圆柱体可视化。
- 关闭圆柱体可视化。
- 设置圆柱体的颜色。取值范围:[-2,360] 。默认值:-2 。
圆柱体列表/cylinder_list:圆柱体列表在 3D 视图中的可视化属性。属性值描述与圆柱体一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:单个 pose 数据
pose_list:数据类型:PoseList
输入内容:pose 数据列表
输出:
cylinder:数据类型:Cylinder
输出内容:单个 cylinder 数据
cylinder_list:数据类型:CylinderList
输出内容:cylinder 数据列表
功能演示
本节将使用 PoseToElement 算子中 Cylinder ,将 Pose 转 Cylinder 元素。这与 PoseToElement 算子的 Cube 属性将 Pose 转 Cube的方法相同,请参照该章节的功能演示。
Circle
将 PoseToElement 算子的 类型 属性选择 Circle ,用于将 Pose 转 Circle 。
算子参数
半径/radius:设置拟合圆的半径。圆圈/circle:设置拟合圆在 3D 视图中的可视化属性。- 打开拟合圆可视化。
- 关闭拟合圆可视化。
- 设置拟合圆的颜色。取值范围:[-2,360] 。默认值:-2。
圆圈列表/circle_list:设置拟合圆列表在 3D 视图中的可视化属性。参数值描述与圆圈一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:单个 pose 数据
pose_list:数据类型:PoseList
输入内容:pose 数据列表
输出:
circle:数据类型:Circle
输出内容:单个 Circle 数据
circle_list:数据类型:CircleList
输出内容:Circle 数据列表
功能演示
本节将使用 PoseToElement 算子中 Circle ,将 Pose 转 Circle 元素。这与PoseToElement 算子的 Cube 属性将 Pose 转 Cube的方法相同,请参照该章节的功能演示。
Object
将 PoseToElement 算子的 类型 属性选择 Object ,用于将 Pose 转 Object 。
算子参数
文件/file:输入或选择:3D 模型文件名( obj 格式)。物体/object:设置 3D 模型在 3D 视图中的可视化属性。- 打开 3D 模型可视化。
- 关闭 3D 模型可视化。
物体列表/object_list:设置 3D 模型列表在 3D 视图中的可视化属性。参数值描述与物体一致。
数据信号输入输出
输入:
说明
pose 和 pose_list 根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:单个 pose 数据
pose_list:数据类型:PoseList
输入内容:pose 数据列表
filename:数据类型:String
输入内容:3D 模型文件名
输出:
object:数据类型:Object
输出内容:单个 object 数据
object_list:数据类型:ObjectList
输出内容:object 数据列表
功能演示
本节将使用 PoseToElement 算子中 Object ,将 Pose 转 Object 元素。这与PoseToElement 算子的 Cube 属性将 Pose 转 Cube的方法相同,请参照该章节的功能演示。
Path
将 PoseToElement 算子的 类型 属性选择 Path ,用于将 Pose 转 Path 。
算子参数
path:设置路径在 3D 视图中的可视化属性。- 打开路径可视化。
- 关闭路径可视化。
path_line_width:设置路径的线宽。默认值:1。
数据信号输入输出
输入:
pose_list:数据类型:PoseList
输入内容:pose 数据列表
输出:
path:数据类型:Path
输出内容:Path 数据
功能演示
使用 PoseToElement 算子中 Path ,将 Pose 转 Path 元素。
步骤1:算子准备
添加 Trigger 、Load 、PoseToElement 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → pose
目录 →
 → 选择 pose 文件目录名 ( example_data/pose )
→ 选择 pose 文件目录名 ( example_data/pose )
设置 PoseToElement 算子参数:
类型 → path
path→
可视
步骤3:连接算子
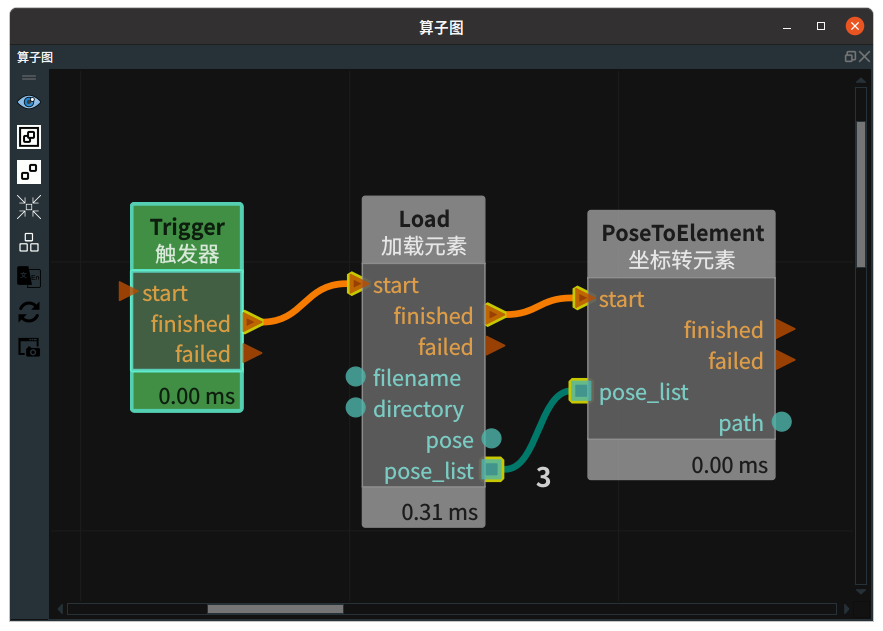
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,在 3D 视图中显示转成的 path 元素。
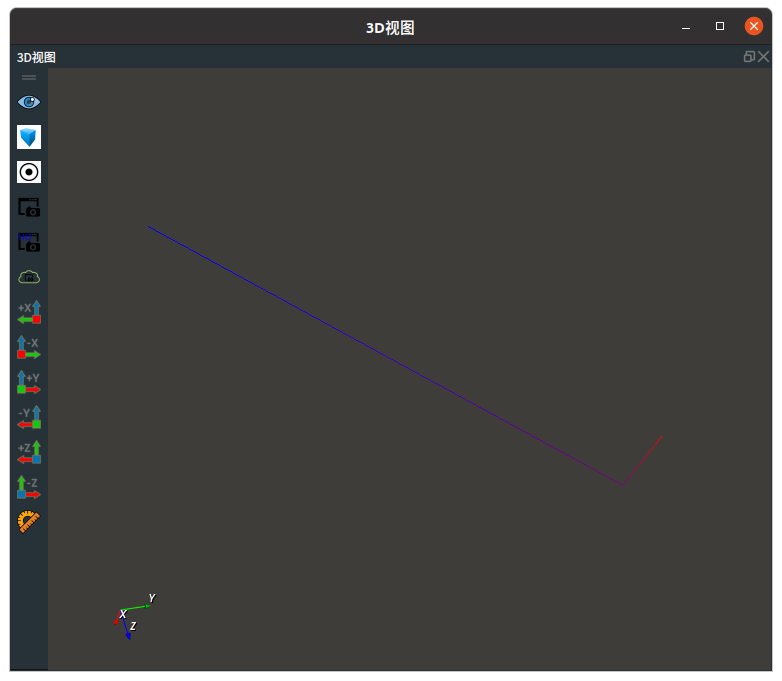
Sphere
将 PoseToElement 算子的 类型 属性选择 Sphere ,用于将 Pose 转 Sphere 。
算子参数
半径/radius:设置球体的半径。球体/sphere:设置球体在 3D 视图中的可视化属性。- 打开球体可视化。
- 关闭球体可视化。
- 设置球体的颜色。取值范围:[-2,360] 。默认值:-2 。
- 设置球体的透明度。取值范围:[1,10] 。默认值:0.8 。
球体列表/sphere_list:设置球体列表在 3D 视图中的可视化属性。参数值描述与球体一致。
数据信号输入输出
输入:
说明
根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:单个 pose 数据
pose_list:数据类型:PoseList
输入内容:pose 数据列表
输出:
sphere:数据类型:Sphere
输出内容:单个球体数据
sphere_list:数据类型:SphereList
输出内容:球体数据列表
功能演示
本节将使用 PoseToElement 算子中 Sphere ,将 Pose 转 Sphere元素。这与PoseToElement 算子的 Cube 属性将 Pose 转 Cube 的方法相同,请参照该章节的功能演示。
String
将 PoseToElement 算子的类型属性选择 String,用于将 Pose 转 String。
算子参数
精度/precision:设置保留坐标值小数点后的位数(四舍五入)。默认值:3。取值范围:[1~10]。坐标内分隔符/delimiter_inside_pose:设置坐标内分隔 x y z yaw pitch yaw 的符号。包含:“space”、“;”、“,”、“#”、“&”、“*”。坐标间分隔符/delimiter_between_pose:设置坐标与坐标之间的符号。包含:“space”、“;”、“,”、“#”、“&”、“*”。保留字段/keep_field:选择保留 pose 指定的字段。包含:All、X、Y、Z、Roll、Pitch、Yaw。字符串/string:设置字符串的曝光属性。曝光后可以与交互面板中输出工具“文本框”或“表格”进行绑定。- 打开曝光。
- 关闭曝光。
文本列表/text_list:设置字符串列表的曝光属性。曝光后可以与交互面板中输出工具“表格”进行绑定。坐标列表字符串/pose_list_string:设置坐标列表字符串的曝光属性。曝光后可与交互面板中输出工具’’文本框“进行绑定。
数据信号输入输出
输入:
说明
pose 和 pose_list 根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:单个坐标
pose_list:数据类型:PoseList
输入内容:坐标列表
输出:
string:数据类型:String
输出内容:单个字符串
string_list:数据类型:StringList
输出内容:字符串列表
pose_list_string:数据类型:String
输出内容:坐标列表字符串
功能演示
使用 PoseToElement 算子中 String ,将加载的坐标转成字符串输出 。
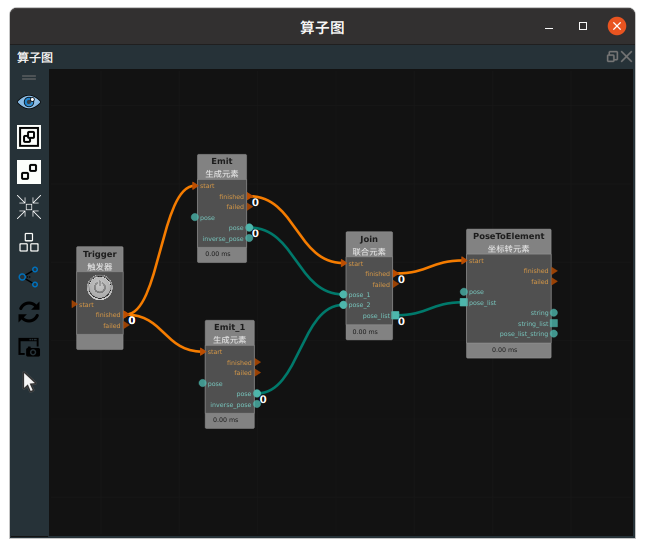
步骤1:算子准备
添加 Trigger 、Emit(2个) 、Join、PoseToElement 算子至算子图。
步骤2:设置算子参数
设置 Emit 算子参数:
类型 → Pose
坐标 → 1.167890 1.140000 1.110000 1.000000 1.000000 1.000000
设置 Emit_1 算子参数:
类型 → Pose
坐标 → 2.123400 2.110000 2.560000 4.000000 5.000000 6.000000
设置 Join 算子参数:类型→ Pose
设置 PoseToElement 算子参数:
类型 → String
精度 → 1
坐标内分隔符 → ,
坐标间分隔符 → &
字符串列表→
曝光坐标列表字符串→
曝光
步骤3:连接算子
步骤4:运行
将
字符串列表属性与交互面板中输出工具“表格”进行绑定。将
坐标列表字符串属性与交互面板中输出工具“文本框”进行绑定。点击 RVS 运行按钮,触发 Trigger 算子。
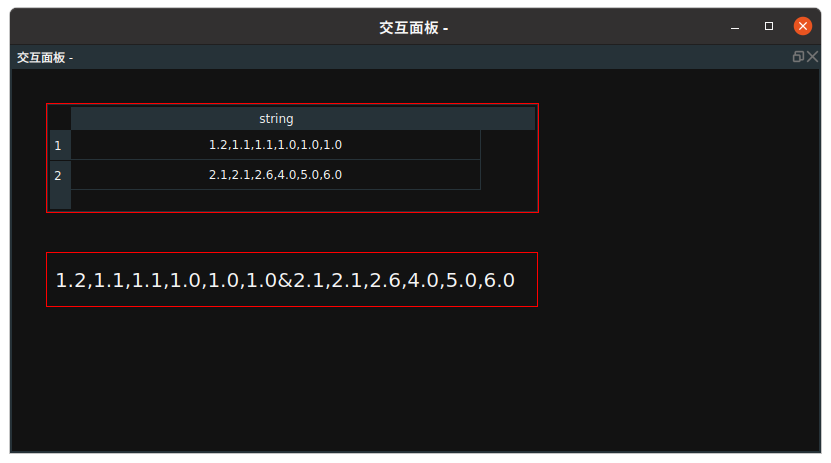
运行结果
如下图所示,在 交互面中显示组合后的坐标列表转成的字符串列表和坐标列表字符串。
Text
将 PoseToElement 算子的 类型 属性选择 Text ,用于将 Pose 转 Text 。
算子参数
文本/text:设置要转成的文字。默认值:%d 。表示显示 pose_list 的 index 。说明
只有输入 pose_list 时才会显示索引。
文本/text:设置文字在 3D 视图中的可视化属性。- 打开文字可视化。
- 关闭文字可视化。
- 设置文字的颜色。取值范围:[-2 , 360]。默认值:-1 。
 设置文字的尺寸大小。取值范围:[0 , 99.99]。默认值:0.05。
设置文字的尺寸大小。取值范围:[0 , 99.99]。默认值:0.05。
文本列表/text_list:设置文字列表在 3D 视图中的可视化属性。参数值描述与文本一致。
数据信号输入输出
输入:
说明
pose 和 pose_list 根据需求选择其中一种数据信号输入即可。
pose:数据类型:Pose
输入内容:单个 pose 数据
pose_list:数据类型:PoseList
输入内容:pose 数据列表
输出:
text:数据类型:Text
输出内容:单个文字数据
text_list:数据类型:TextList
输出内容:文字数据列表
功能演示
使用 PoseToElement 算子中 Text ,显示加载 pose 列表的对应索引。
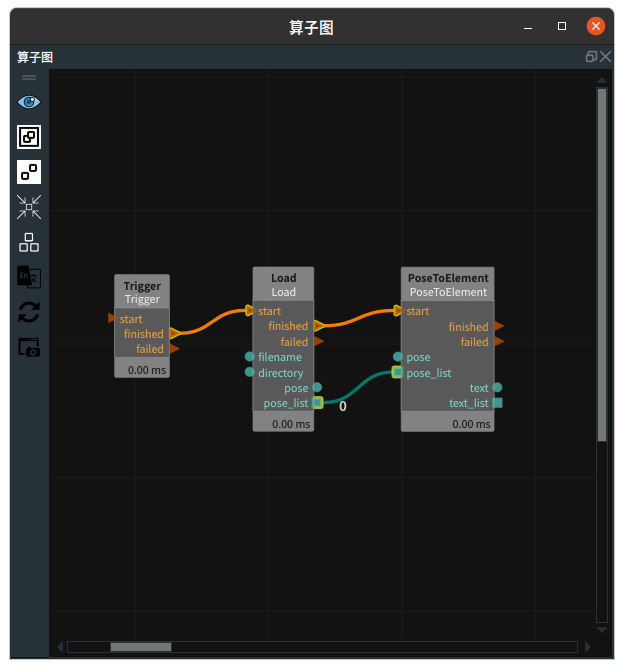
步骤1:算子准备
添加 Trigger 、Load 、PoseToElement 算子至算子图。
步骤2:设置算子参数
设置 Load 算子参数:
类型 → Pose
目录 →
→ 选择 pose 文件目录名 (example_data/pose)坐标列表→
可视
设置 PoseToElement 算子参数:
类型 → Text
文本列表→
可视
步骤3:连接算子
步骤4:运行
点击 RVS 运行按钮,触发 Trigger 算子。
运行结果
如下图所示,在 3D 视图中显示对应的 pose 和对应的 index 。